

8.3 Следящие автоматические системы
Алгоритм этой системы построен на жестком повторении следящей системой задающего сигнала (рис.8.4)
 n
n
5 4
8
6
Рисунок 8.4 Структурная схема следящей автоматической системы
Схема обеспечивает стабилизацию скорости резания при изменении диаметра обработки детали 4 . Изменение диаметра обеспечивается индуктивным датчиком 5 , кинематически связанным с суппортом станка и профилированной линейкой 6 . Сигнал, зафиксмрованный датчиком, усиливается усилителем 7 и подается в сравнивающее устройство 8. В сравнивающее устройство подается также сигнал от датчика 1. Последний в результате сравнения вырабатывает сигнал коррекции, который усиливается 2 и подается в привод двигателя станка 3 для регулирования n.
Такие системы повышают стойкость инструмента и производительность станка.
8.4 Автоматические системы программного управления
На рисунке 8.5 представлена укрупненная структурная схема числового программного устройcтва класса CNC .
Микропроцессор реализует логические параметрические операции, функции которых заданы программным путем. Программа хранится в блоке памяти . Переработка исходной информации, содержащейся в управляющей программе , ведется в соответствии с программой функционирования. Согласно этой программе формируются команды на приводы станка и его электроавтоматические устройства. Цифровые входы и выходы обеспечивают управление и связь со станком.
Основные достоинства процессорной техники, обуславливающие их применение для управления металлорежущими станками, следующие: низкая стоимость, гибкость, надежность, малые размеры и вес , малое время разработки СЧПУ, быстровозрастающие вычислительные возможности (объем памяти, скорость вычислений). Это открывает широкие перспективы для автоматизации путем непосредственного встраивания микропроцессорной управляющей техники в станки.

 На
станок Со станка
Память
На
станок Со станка
Память

Рисунок 8.5 – Структурная схема программного устройства ЧПУ класса CNC
8.5 Автоматические системы оптимального управления
Такая система (рис.8.6) осуществляет автоматический поиск и поддерживание S (подачи) и V (скорости), которые обеспечивают экстремальное значение целевой функции H обработки при наличии технических ограничений t (глубины резания), Мкр, tС, Р (силы резания).
При обработке заготовок по заданной управляющей программе осуществляется автоматический поиск и поддержание таких сочетаний скорости резания V и подачи S которые обеспечивают обработку заготовки (детали) с заданной точностью при наличии технических и возмущающих воздействий (колебаний припуска, твёрдости материала заготовки, режущих свойств инструмента и др.).
Замеренные датчиком значения параметров процесса резания поступают в блок обработки показателей, куда одновременно поступают значения параметров ограничения процесса резания. Показатель целевой функции H поступает в вычислительное устройство, куда одновременно поступает заданное значение критерия оптимальности. Вычислительное устройство по заложенной в нём программе вычисляет сигнал оптимального управления, которое подаётся в оптимизатор. Последний определяет значение Y и S, с помощью которых корректируется процесс резания.
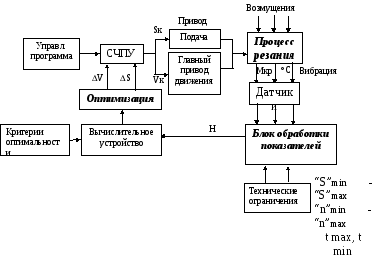
Рис.8.6 – Структурная схема оптимальной автоматической системы управления
Оптимальные системы особенно эффективно работают на фрезерных станках при обработке сложных заготовок, а также на токарных операциях.