2. Вопросы, которые изучает наука «тмм».
ТММ
Строение Кинематика Динамика
механизма механизма механизма





 Даны
Найти
Дан
Найти
Даны
Найти
Дан
Найти
свойства. механизм. механизм. свойства.
Синтез Анализ
3. Основные понятия тмм, термины и определения.
Машина – это устройство, предназначенного для преобразования:
энергии (двигатель внутреннего сгорания, турбина ),
информации (ЭВМ),
материалов (токарный станок, пилорама, пресс, кран).
Каждая машина состоит чаще всего из нескольких механизмов.
Механизм- это система тел, предназначенных для преобразования одного вида движения в другой вид движения, например: вращательное во вращательное, вращательное в возвратно-поступательное и т.д.
Механизм состоит из звеньев:
- стойка – неподвижное звено любого механизма,
кривошип – совершает вращательное движение,
- шатун – совершает сложное плоско-параллельное движение,
ползун – совершает возвратно-поступательное движение,
коромысло (качающееся звено) – совершает неполный оборот вокруг оси,
кулиса – звено, совершающее поступательное, вращательное или качательное движения, по которому перемещается ползун. В этом случае ползун называют камень кулисы.
Звенья в механизме соединяются между собой подвижным соединением. Подвижное соединение двух звеньев называется кинематической парой.
Если соединяются два звена, то будет одна кинематическая пара. Если соединяются три звена, то будет две кинематических пары. Если соединяются N звеньев, то будет N-1 кинематическая пара.
4. Классификация кинематических пар.
Кинематические пары


Классы Группы


(Смотри с……)
Звено Звено

Подвижное
соединение
Класс кинематической пары= S (числу ограничений).
 Z
Z
H = 6
S = 0
S - число ограничений
H – степень свободы
S = 6 - H
X Y
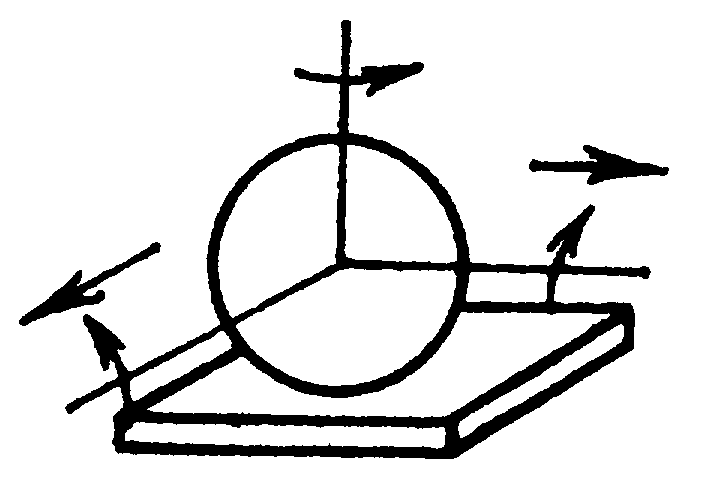 1. Шар –
плоскость: H = 5; S = 1; класс 1.
1. Шар –
плоскость: H = 5; S = 1; класс 1.
2. Шар – цилиндр: H = 4; S = 2; класс 2.

 3. Сферическая:
H = 3; S = 3; класс 3.
3. Сферическая:
H = 3; S = 3; класс 3.

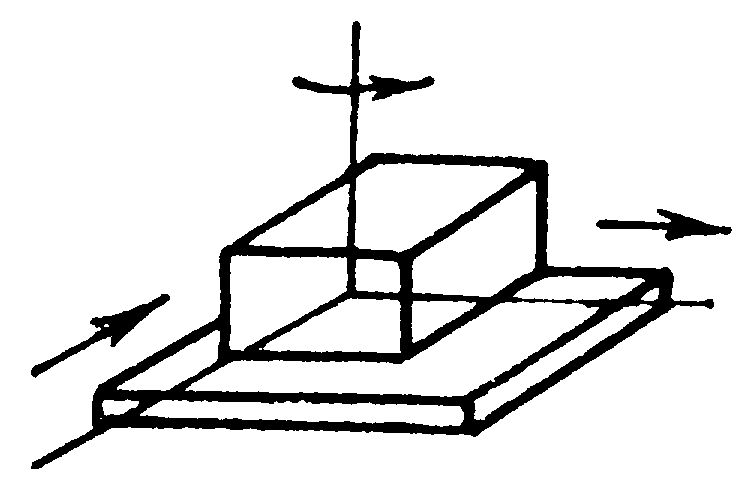 4. Плоскостная:
H = 3; S = 3; класс 3.
4. Плоскостная:
H = 3; S = 3; класс 3.
5.Цилиндрическая: H = 2; S = 4; класс 4.

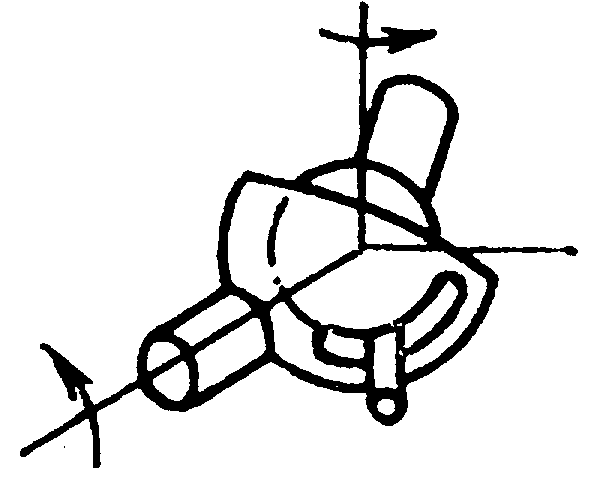
6. Сферическая с пальцем: H = 2; S = 4; класс 4.
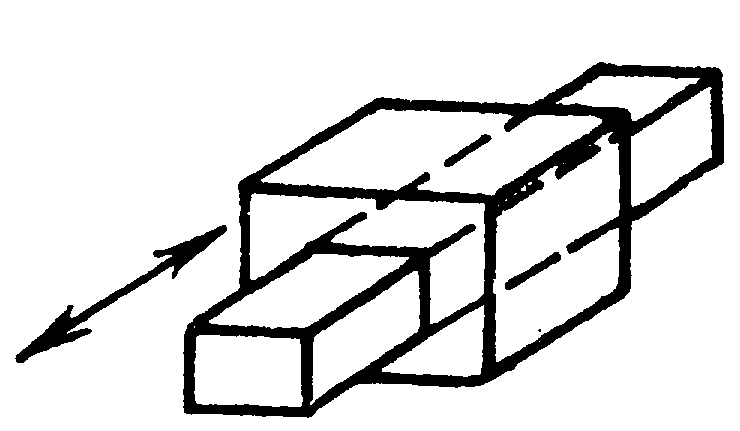
7.Поступательная: H = 1; S = 5; класс 5.
 8.Вращательная:
H = 1; S = 5; класс 5.
8.Вращательная:
H = 1; S = 5; класс 5.
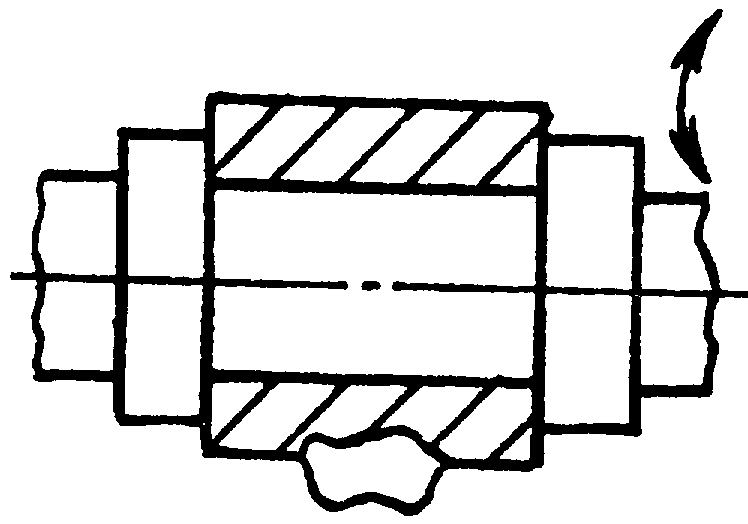
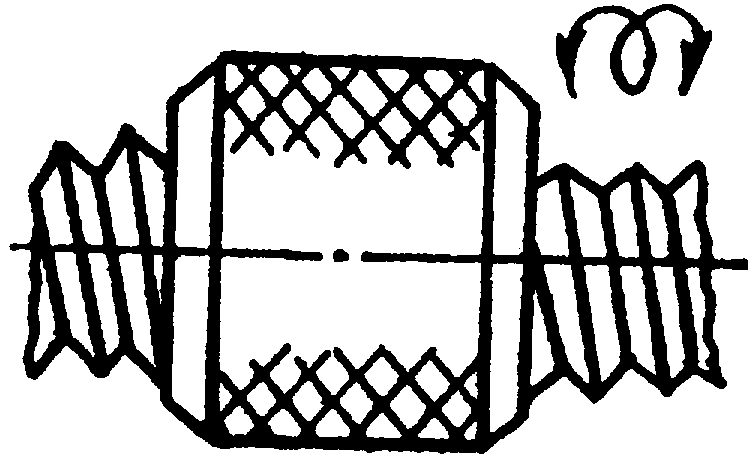
 9.Винтовая:
H = 1; S = 5; класс 5.
9.Винтовая:
H = 1; S = 5; класс 5.