

Тема 5: механические передачи
1. Классификация механизмов передач
С гибкими звеньями (цепные и ременные)

2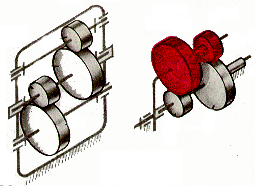
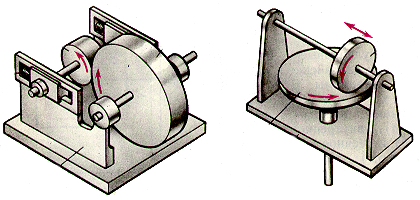 .
Фрикционные
.
Фрикционные
3. Зубчатые
2. Классификация зубчатых механизмов передач.
Оси зубчатых колёс параллельны (плоские механизмы)

Прямой зуб Косой зуб Шевронный зуб
В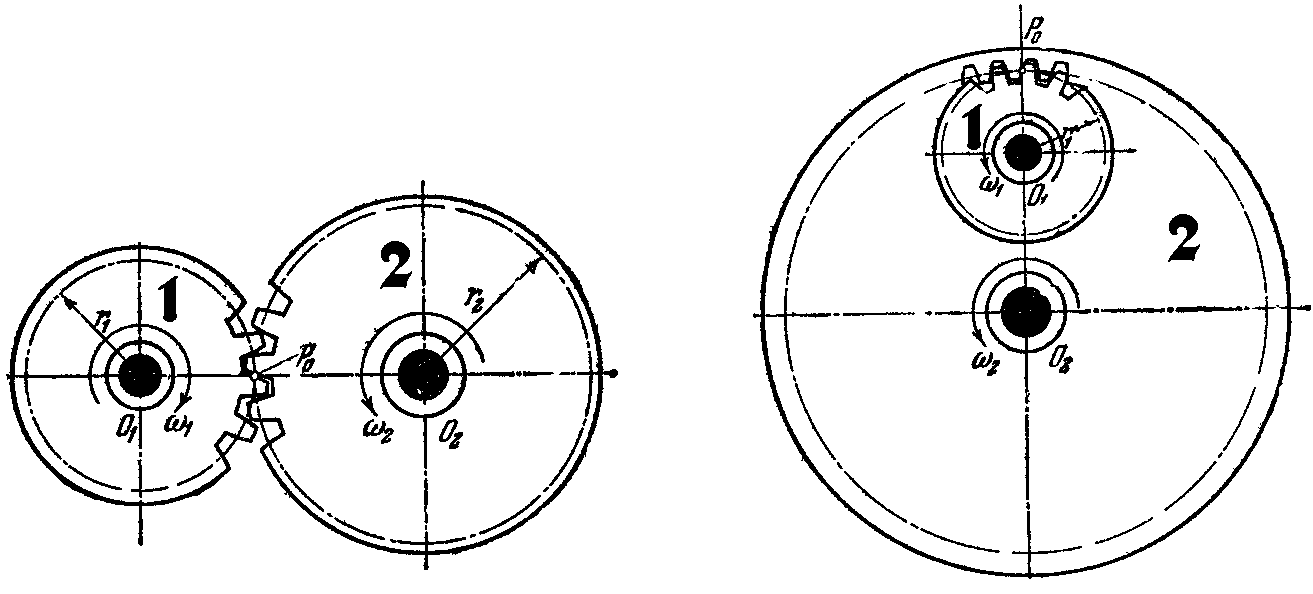 нимание!
В плоских механизмах обязательно
определять знак передаточного отношения.
нимание!
В плоских механизмах обязательно
определять знак передаточного отношения.
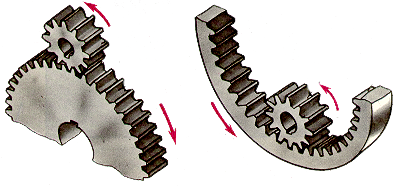
Внешнее зацепление Внутреннее зацепление
![]()
![]()
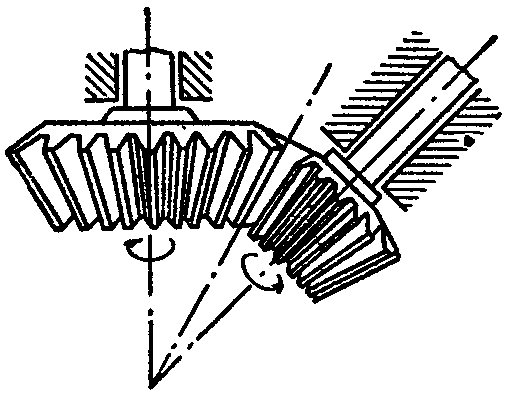
Оси зубчатых колёс пересекаются
(пространственные механизмы)
1![]()


2
Где:
n – частота вращения, (об./мин.),
w – угловая скорость, (рад./сек),
z – число зубьев колеса.
Внимание! В пространственных механизмах знак передаточного отношения не определяется.
Оси зубчатых колес скрещиваются
(пространственные механизмы).

n1 w1 zk


 U12
= = = ,
U12
= = = ,
n2 w2 zч
где:
ZK – число зубьев колеса,
ZЧ – число заходов червяка.
Заходы червяка






![]()
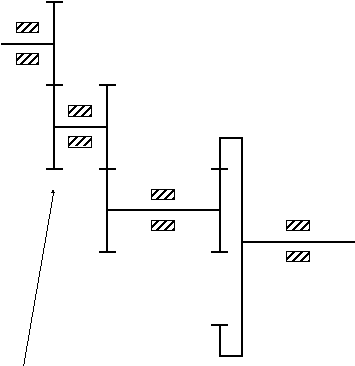
3. Многоступенчатые редуктора
1
3
 4
5 6
4
5 6
Ступени
![]()
где m – число внешних зацеплении.
4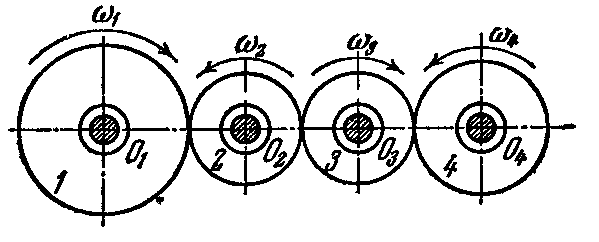 .
Рядовое соединение зубчатых колёс с
промежуточными (паразитными) колёсами
.
Рядовое соединение зубчатых колёс с
промежуточными (паразитными) колёсами

1
2
3
4
4
5. Планетарные редуктора








 2
3 4
2
3 4









 1 H
1 H

1 – подвижное колесо,
2 и 3 – блок сателлитов (два колеса жестко закрепленных
на одном валу),
4 – неподвижное колесо,
Н – водило (вращающееся звено, которое соединяется с
осью сателлитов).
Алгоритм определения передаточного отношения от
колеса 1 к водилу H при неподвижном колесе 4: U1H(4) = ?
Мысленно остановить водило и определить передаточное отношение от подвижного колеса к тому колесу, которое в планетарном механизме было неподвижным:
Z2 . Z4 Z2 . Z4
U

 14(H)
= (-1)m
. U12
. U34
= (-1)1
. =
14(H)
= (-1)m
. U12
. U34
= (-1)1
. =
Z1 . Z3 Z1 . Z3








 2
3 4
2
3 4








 1
1


2. Полученный результат вычесть из 1:
Z2 . Z4 Z2 . Z4



 U1H(4)
= 1 ( ) = 1 +
U1H(4)
= 1 ( ) = 1 +
Z1 . Z3 Z1 . Z3