

Горные машины и оборудование
.pdf
|
|
|
|
|
|
|
|
|
|
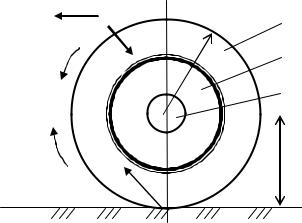
4.3.4 Обозначение и назначение шин |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|||
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|||
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|||||||
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 – товарный знак |
|
|
|
|
|
|
|
|
|
|
|
|
|
7 – камерная (бескамерная); |
|
|
|
|
||||||||||||||||||||||||
|
|
|
предприятия-изготовителя; |
|
|
|
|
8 – дата изготовленияН; |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
2 – фирменное обозначение; |
|
|
|
|
|
|
9 – знак официального утверждения; |
|||||||||||||||||||||||||||||||||||
|
3 – размеры шины, в мм (дюймы); |
|
|
|
|
10 – допускаемоеБдавление в шине; |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
4 –модель шины; |
|
|
|
|
|
|
|
|
|
|
|
|
|
11 – странаизготовитель; |
|
|
|
|
||||||||||||||||||||||||
|
5 – конструкция (радиальная); |
|
|
|
|
|
|
12 – ндекс несущей способности; |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
6 – нормативный документ; |
|
|
|
|
|
|
|
|
|
13 – ндекс скорости. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
Индекс несущей |
способности |
(ИНС) – одно или два числа, указыва- |
||||||||||||||||||||||||||||||||||||||
|
ющие нагрузку, которую м жет выде жать одиночная или сдвоенная шина |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
при скоростях, соответствующих надлежащей категории скорости. Ряд ИНС |
||||||||||||||||||||||||||||||||||||||||||
|
состоит из 200 чисел (0÷199) с диапазоном нагрузок (45÷13600) кг: |
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
скорости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
ИНС |
|
|
0 |
|
|
4 |
10 |
20 |
|
28 |
|
|
|
42 |
|
|
|
|
52 |
|
76 |
|
108 |
|
|
132 |
|
156 |
|
|
199 |
|||||||||||
|
кг |
|
|
45 |
|
|
50 |
50 |
80 |
|
100 |
|
|
150 |
|
200 |
|
400 |
1000 |
|
|
2000 |
|
4000 |
|
13600 |
|||||||||||||||||
|
|
|
Категор я |
|
|
|
|
– это указанная с помощью условного обозначе- |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
ния скорость, при которой шина может выдержать нагрузку соответствую- |
||||||||||||||||||||||||||||||||||||||||||
|
щим ИНС. Ряд категорий скорости включает 29 позиций (скорость от 5 до |
||||||||||||||||||||||||||||||||||||||||||
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
свыше 270 кмз/ч): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Кат - |
|
|
А1- |
|
B |
C |
|
E |
|
G |
|
J |
|
|
|
|
K |
|
|
L |
P |
|
S |
|
U |
V |
W |
|
Z |
|||||||||||||
|
гор. |
|
|
А8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Р |
|
|
|
5-40 |
50 |
6 |
|
70 |
|
90 |
|
10 |
|
|
|
|
110 |
|
12 |
|
150 |
|
18 |
|
200 |
|
24 |
27 |
|
>27 |
|||||||||||||
|
км/ч |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
0 |
0 |
|
|
0 |
|||
По основному назначению, т.е. по комплектованию движителей транспортных средств или технологических машин они подразделяются на:
-шины для автомобилей большой и особо большой грузоподъемности;
-шины для строительных, дорожных и подъемно-транспортных машин;
-шины для тракторов и сельскохозяйственных машин;
-шины для грузовых автомобилей и автобусов;
-шины для легковых и легкогрузовых автомобилей;
-шины для велосипедов и мотоциклов.

|
|
|
|
|
|
|
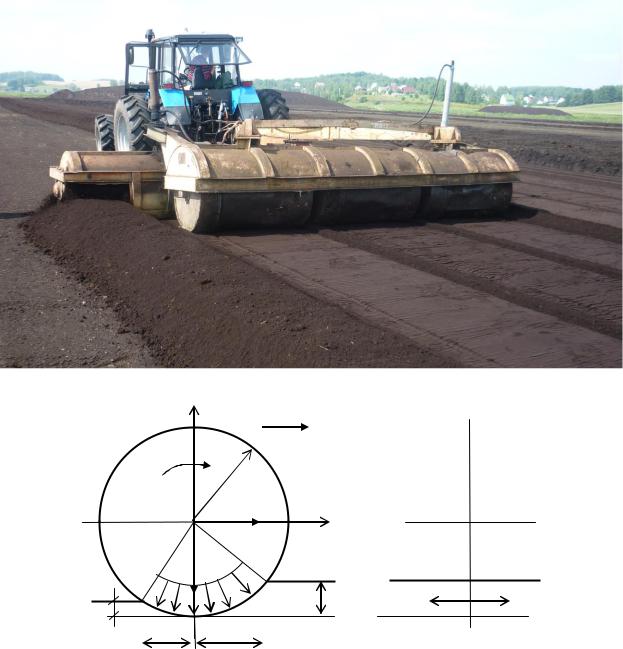
4.3.5 Режимы движения колеса |
|
|
|
||||
ВЕДОМЫЙ |
|
|
|
|
|
|
|
|
|
|
|
|||
|
rк |
|
w |
О – ось вращения колеса; Ок- ось условного колеса |
||||||||||
|
|
|
|
|
|
|
G=mg – нормальная нагрузка, Н |
|
|
|
||||
|
|
|
|
|
|
|
F – тяговое (толкающее) усилие, Н |
|
У |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rcОк |
|
|
F |
= F / G – коэффициент сопротивления движению |
|||||||
|
|
|
|
|
|
rс |
и rк – статический и кинематический радиусы, м |
|||||||
|
|
|
О |
|
|
|
- угловая скорость, рад/с |
|
|
Т |
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Движение с некоторым скольжением |
(rк rс) |
||||||
|
|
|
G |
|
|
|
w= rк= rс(1+ ), - поступательная скорость, м/с |
|||||||
ВЕДУЩИЙ |
|
|
|
|
|
|
Б |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
w |
|
|
G – нормальная нагрузка, Н |
|
|
|
|
|||
|
|
|
|
|
|
|
Мкр – приводной (крутящий) моментН, .м |
|
||||||
|
|
|
О |
|
|
|
=[РТ]/ G – коэффициент сцепления (max) |
|
||||||
|
|
|
|
|
|
rк |
и rс – кинематический и статический радиусы |
|||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
Мкр |
|
|
Движен е с некоторым буксованием , |
(rк rс) |
|||||||
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
PТ |
|
|
|
|
w0= rс – тео ет йческая (кинематическая) скорость, м/с |
|||||||||
|
|
|
G |
|
w= rк= rс(1- ), - поступательная (действительная)скорость, м/с |
|||||||||
ТЯГОВЫЙ |
|
|
|
о |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
w |
|
|
G – н рмальная нагрузка, Н |
|
|
|
|
|||
|
|
|
|
|
|
|
Мкр – прив дной (крутящий) момент, Н.м |
|
||||||
|
|
|
|
|
|
Ркр – крюковое сопротивление, Н |
|
|
|
|||||
Ркр |
О |
з |
т=[РТ]/ G – коэффициент сцепления (max) |
|
||||||||||
|
|
|
|
|||||||||||
|
|
|
о |
|
|
rк и rс – кинематический и статический радиусы, м |
||||||||
|
|
|
и - угловая скорость, рад/с |
|
|
|
|
|||||||
|
п |
Мкр |
|
|
|
|
||||||||
|
|
|
|
Движение с некоторым буксованием , |
(rк rс) |
|||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
G |
|
|
|
w= rк= rс(1- ), - поступательная (действительная)скорость |
|||||||
еМТ |
|
|
|
|
|
|
|
|
|
|
|
|||
ТОРМОЖЕНИЕ |
|
|
|
|
|
|
|
|
|
|
||||
Р |
|
|
а |
w |
|
|
|
G – нормальная нагрузка, Н |
|
|
|
|
||
|
|
|
|
|
|
|
|
Р – тяговое (толкающее, инерционное) усилие, Н |
||||||
|
|
|
|
|
|
|
|
МТ – тормозной момент, Н.м |
|
|
|
|||
|
|
|
О |
|
|
Р |
|
w - поступательная скорость, м/с |
|
|
||||
|
|
|
|
|
|
|
- угловая скорость, рад/с; |
при =0 – «юз» |
||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
а – ускорение (замедление), м/с |
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Движение со скольжением и замедлением а, (rк rс) |
||||||
|
|
|
G |
|
|
|
Характеризуется временем торможения и тормозным путем |
|||||||
4.3.6 Особенности и режимы движения колес
Колесные движители в виду их распространения во всех сферах народного хозяйства и высоких эксплуатационных качеств находят самое широкое применение в горных машинах для выполнения самых различных работ.
Основным элементом колесных движителей является колесо. Колеса классифицируются по различным признакам: конструкции, режимы и условия работы, назначение и т.д. различают колеса:
- пассивные (ведомые); |
ТУ |
- активные (ведущие); |
|
- жесткие; |
|
- деформируемые. |
|
Все колеса могут работать в различных режимах в зависимости от ве- |
|
личин и соотношения нагрузок, действующих на них, а также от кинематиче- |
||||||||||||||
ских характеристик движителя. Кинематические характеристики движителя |
||||||||||||||
колеса обычно включают: действительную и теоретическую скорости, угло- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
вую скорость вращения, радиус качения, угол увода и некоторые другие па- |
||||||||||||||
раметры, которые используются |
теории автомобильного транспорта, где ча- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
ще всего используются упругие пневматические колеса. |
||||||||||||||
Для выяснения физического смысла некоторых характеристик движе- |
||||||||||||||
ния колес рассмотрим |
|
прямолинейное |
дв жение пневматического колеса |
|||||||||||
(Рис. 4.4) |
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
||
|
|
|
|
|
|
|
|
v |
|
|
|
3 |
||
|
|
|
|
|
|
|
|
|
рP |
|
|
|||
|
|
|
|
z |
|
ω |
rc |
|
2 |
|||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
о |
|
|
|
1 |
||
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
L |
|
|
|
|
|
|
rcm |
|||
|
|
|
и |
|
R |
|
|
|
|
|||||
|
з |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
о |
|
|
|
|
|
|
|
|
|
|
|
|
||
Рисунок 4.4 – Прямолинейное движение пневматического колеса |
||||||||||||||
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и его основные элементы: 1 – ступица; 2 – обод (дик); 3 – шина |
||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ступицей колеса называют подшипниковый узел, служащий для пере- |
||||||||||||||
дачи на него сил со стороны рамы машины и обеспечивающей передачу этих |
||||||||||||||
Рсил посредством тел качения. Обод – промежуточная, чаще всего жесткая, |
||||||||||||||
конструкция между ступицей и шиной, служащая для установки на ней шины. Для дальнейшего описания работы колеса введем следующие обозначения:
v - скорость поступательного движения оси колеса (действительная); vT - теоретическая скорость;
rc - свободный радиус колеса – радиус колеса при номинальном давле-
нии воздуха в шине;
rcm - статический радиус колеса – расстояние от оси вращения колеса до
опорной плоскости при номинальной нагрузке на него;- угловая скорость вращения колеса.
Нагрузки, действующие на колесо, разделим на две группы. К первой группе отнесем силы, действующие на него со сторон рамы и трансмиссии.
Ко второй – нагрузки со стороны опорной поверхности. Нагрузки первой |
|||||||||||||||||
группы выразим главным вектором Р и главным моментом М, а нагрузки |
|||||||||||||||||
второй – вектором R и моментом L. При равномерном движении колесо |
|||||||||||||||||
находится в равновесии под действием этих нагрузок. Основные кинематиче- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
ские характеристики движения определяются следующим образом. |
|
||||||||||||||||
Теоретическая скорость движения |
|
|
|
|
Т |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
vT |
rc |
|
|
Н |
|
(4.15) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Действительная скорость движения |
Б |
|
|
|
|||||||||||||
|
|
|
|
|
|
v rк . |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
(4.16) |
||||||
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
||
Эта скорость определяется также как разность между теоретической |
|||||||||||||||||
скоростью и потерями скорости, т. е. |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
||||
|
|
|
|
|
|
v vT vn , |
|
|
|
|
|
(4.17) |
|||||
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
||||
где vn - потери скорос |
. о |
|
|
|
|
|
|
|
|
|
|
|
|||||
Таким |
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
и |
|
|
|
|
|
|
|
vn |
|
|
|
|
||
|
|
образом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rк rc |
vn |
|
r |
|
|
(4.18) |
||||||||
|
|
|
rc 1 |
, |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
или иначе |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
п |
|
|
|
|
|
v |
n |
|
vT 1 |
, |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
(4.19) |
|||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
v vT 1 v |
|
|
|
|
|
|||||||||
е |
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
||
|
|
называют коэффициентом буксования. |
|
|
|
||||||||||||
где величину |
|
|
|
||||||||||||||
Величина потерь скорости зависит, прежде всего, от силы взаимодей- |
|||||||||||||||||
Рствия между колесом и опорной поверхностью, а также от их физико- |
|||||||||||||||||
механических свойств. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Из (4.4) и (4.5) имеем также соотношение между радиусом качения и |
|||||||||||||||||
свободным радиусом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
rк rc 1 . |
|
|
|
|
|
(4.20) |
||||
Более строго радиус качения определяется посредством, так называемого, радиуса свободного качения. Под этим радиусом понимается радиус качения колеса в таких условиях, когда продольная составляющая силы взаимодействия его с опорной поверхностью равна нулю.
Учитывая зависимость коэффициента буксования от передаваемой ко-
лесом силы тяги величину rк можно рассматривать как кинематическую характеристику движения, так и параметр, связывающий скорость движения с величиной нагрузок, передаваемых колесом. Соотношение между этими
основными являются ведущий, ведомый и тормозной. Это обусловленоУ |
, |
|||||||||
прежде всего, особенностями движения колесных машин в условиях горно- |
||||||||||
перерабатывающих предприятий. В соответствии с рис.4.1Тведущий режим |
||||||||||
характеризуется тем, что при движении колеса в этом режиме |
|
|
||||||||
|
M 0 ; |
|
Py 0 ; |
|
Ry 0 |
, |
Н |
(4.21) |
||
|
|
|
Б |
|
||||||
в ведомом режиме |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M 0 ; |
|
Py 0 ; |
|
Ry 0 |
, |
|
|
(4.22) |
|
|
|
|
|
й |
|
|
|
|||
а в тормозном режиме |
|
и |
|
|
|
|
|
|||
|
M 0 ; |
|
|
|
|
(4.23) |
||||
|
|
Py 0 ; |
|
Ry 0 . |
|
|
||||
Особенностью раб ы к леса является то, что сила |
Ry является силой |
|||||||||
трения, причем ее |
|
р |
|
|
|
|
|
|
|
|
при н рмальных условиях работы колеса меньше |
||||||||||
предельной силы трен я,оопределяемой законом трения Амонтона-Кулона. |
||||||||||
Важно также обрат |
ь вн мание на т о, |
что для ведущего колеса равнодей- |
||||||||
|
т |
|
|
|
|
|
|
|
|
|
ствующая реакц й опорной поверхности отклонена от оси колеса в направ- |
||||||||||
нагрузками определяет режим движения колеса. В общей теории работы колеса выделяют достаточно большое число таких режимов. Для горных машин
лении его движения, а для ведомого – наоборот, в противоположную сторо- |
||
|
|
величина |
ну. При движении колеса в тормозном режиме, независимо от того, ведущее |
||
это к |
|
з |
или ведомое, полная реакция опорной поверхности отклонена от |
||
оси в ст р ну, противоположную движению. |
||
Длялесодвижения колеса, как механизма, обладающего двумя степенями |
||
свободы ( |
оступательное и вращательное независимые движения) движущей |
|
п |
|
|
силой, обеспечивающей такие движения, является сила трения между коле- |
||
Регосом и опорной поверхностью. Это ещё раз подчеркивает тот факт, что силы трения, которые в своем большинстве являются вредными силами сопротивления движению, в некоторых механизмах являются необходимыми. При равномерном движении колесного движителя по практически недеформируемой опорной поверхности сила Ry равна силе трения. В тех случаях, когда движение сопровождается большими деформациями несущего основания, поверхность контакта движителя с опорной поверхностью не является плоскостью и сила трения распределена по этой сложной по форме поверхности.

4.3.7 Сопротивление движению колесных движителей
Как уже указывалось, при оценке взаимодействия движителей с опорными основаниями различаются несколько ситуаций в зависимости от их
прочностных характеристик и характера деформаций. При движении колеса |
|||||||||||||||||||
энергия, подводимая к нему от машины, расходуется на деформирование |
|||||||||||||||||||
опорного основания и самого колеса. А также на преодоление трения между |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
ними и в ступице колеса. При отсутствии буксования эта энергия тратится на |
|||||||||||||||||||
деформирование основания, так как потери энергии в современных ступич- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
ных узлах ничтожно малы. В связи с этим сопротивление движению такого |
|||||||||||||||||||
колеса целесообразно оценивать коэффициентом fк, который выражается от- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
ношением некоторой толкающей (тянущей) силы Ру для равномерного дви- |
|||||||||||||||||||
жения колеса, нагруженного нормальной к опорной поверхности силой Pz |
|||||||||||||||||||
(Рис.4.5), т. е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|||
|
|
|
|
|
|
|
|
|
f к |
|
Py |
. |
|
|
(4.24) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Pz |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
йv |
|
|
|||||
|
Этот коэффициент может быть определен через плечо сопротивления |
||||||||||||||||||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|||||||
качению (снос вертикальной реакции) fк |
= δ/R. |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
Py |
|
|
|
|
|||
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
з |
|
|
Pz |
|
|
|
δ |
|
|
|
|
||||||
|
о |
|
|
|
|
|
|
|
|
|
Rz |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
п |
|
|
|
|
|
Ry |
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 4.5 – К определению коэффициента сопротивления движению |
||||||||||||||||||
|
Так как затраты энергии на движение колеса в основном |
связаны с де- |
|||||||||||||||||
формирование его |
и несущего основания, то коэффициент fк можно предста- |
||||||||||||||||||
вить в виде суммы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Р |
|
|
|
|
|
|
|
fк fк fк , |
|
|
|
(4.25) |
|||||||
где f к - выражает потери энергии на деформирование самого колеса; f к - то же на деформирование несущего основания.

Величина коэффициентов f к и f к , а также соотношение между ними зависит прежде всего от физико-механических свойств колеса и несущего основания (см. рис4.1). В большинстве случаев значения суммарного коэффициента fк сопротивления движению колеса задаются в справочной литературе [ , ]. Вместе с тем, в некоторых случаях, особенно при создании машин для работы в нестандартных условиях, величину этих коэффициентов можно установить расчётным путём.
Взаимодействие жёсткого колеса с жёстким основанием характерно |
|||||||
для железнодорожного транспорта, достаточно широко используемого в гор- |
|||||||
|
|
|
|
|
|
|
Т |
ном производстве. Для такого типа механизмов перемещения характерна не- |
|||||||
значительная величина коэффициента сопротивления качению, составляю- |
|||||||
|
|
|
|
|
|
Н |
|
щая тысячные доли единицы. По справочным данным суммарныйУкоэффици- |
|||||||
ент сопротивления качению железнодорожных колес составляет 0,00 -0,000 . |
|||||||
|
|
|
|
|
|
Б |
|
|
|
|
|
|
й |
|
|
|
|
|
|
и |
|
|
|
|
|
|
р |
|
|
|
|
|
|
о |
|
|
|
|
|
|
т |
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
Рисун к 4.6 – Железнодорожный состав на временных путях, |
|||||||
роложенных на разрабатываемом торфяном месторождении |
|||||||
Р |
|
|
|
|
|
|
|
п рельсомНаибольшее значение при выборе размеров и числа коле железнодорожных
м ханизмов перемещения имеют контактные напряжения между колесом и
. В основу методов расчета этих напряжений положены формулы Герца, определяющие размеры и фору поверхности соприкосновения при сжатии двух тел в условиях соблюдения закона Гука. Применительно к наиболее распространенным рельсам с головкой сложной цилиндрической формы (Рис.4.4) эти формулы имеют вид

|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
2R1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Pz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pmax |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
Рисунок 4.6 – Контакт колеса с рельсом: |
|
|
||||||||||||||||||||||
|
|
|
|
а) – основные геометрические размеры; |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
б) – форма пятна контакта и эпюра давлений |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
P |
2 |
E |
|
|
Н |
|
|||||
|
|
|
|
|
|
|
|
pmax |
|
|
|
3 |
|
|
z |
|
|
|
; |
|
|
|
(4.26) |
|||||
|
|
|
|
|
|
|
|
|
|
R 1 2 2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
P2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
h |
|
h |
|
|
|
|
3 |
|
|
z |
|
|
|
|
||||||
|
|
|
|
|
h |
|
1,55 |
|
|
|
|
, |
|
(4.27) |
||||||||||||||
|
|
|
|
|
|
|
0 |
1 |
|
|
|
2 |
|
|
|
|
|
й2 |
|
|
||||||||
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
2E |
|
Rc |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где E и R |
- приведенные м дули уп угости и радиус сжимающихся тел; |
|||||||||||||||||||||||||||
|
|
|
|
|
т |
E |
|
2E1 E2 |
|
, |
|
|
|
|
(4.28) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
з |
|
|
|
|
|
|
E1 |
E2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
о |
и |
|
|
|
|
|
|
|
|
2R1 R2 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
R R |
R |
2 |
|
, |
|
|
|
|
(4.29) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
h0 – бщая деформация рельса и колеса; |
|
|
|
|
|
||||||||||||||||||||||
|
h1, h2 - деформация соответственно колеса и рельса. |
|
|
|||||||||||||||||||||||||
Р |
Радиус колеса и его прочность, должны быть такими, чтобы макси- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мальноепнапряжение в пятне контакта не превышали допустимые. Допусти- |
||||||||||||||||||||||||||||
|
контактные напряжения можно принимать равными твердости материа- |
|||||||||||||||||||||||||||
мыелов по Бриннелю, умноженной на коэффициент запаса. Современные чис- |
||||||||||||||||||||||||||||
ленные методы расчёта напряжений и деформаций при контакте колеса с |
||||||||||||||||||||||||||||
рельсом [ |
] позволяют получить более точные решения, |
чем по формулам, |
||||||||||||||||||||||||||
приведенным выше. Однако, при предварительных оценках влияния основных параметров колеса и рельса эти формулы дают более обозримые результаты.
При движении жесткого колеса по деформируемой опорной поверхности (Рис.4.5)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
z |
|
|
|
|
и |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|||
|
|
|
|
|
|
ω |
|
|
о |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Py |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
з |
|
Pz |
|
|
|
|
|
|
|
|
|
|||||
|
|
о |
|
и’ |
|
|
|
h2 |
|
|
|
|
b |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
h2’ |
|
|
a |
|
|
|
|
|
|
|
|
||||||
|
п |
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
е |
|
|
Рисунок 4.7 – Взаимодействие жесткого колеса |
|
|||||||||||||||
Р |
|
|
|
|
|
|
|
с деформируемым основанием |
|
|
|
||||||||
Ж сткие колеса применяются в качестве элементов опорно-ходовых |
|||||||||||||||||||
|
|||||||||||||||||||
устройств достаточно редко, например, ходовые устройства в некоторых дорожных и торфяных машинах. Изучению взаимодействия таких коле с деформируемыми грунтами посвящено большое количество исследований [ , ]. Здесь приведем некоторые расчётные зависимости, которые справедливы при давлениях между колесом и опорным основанием до 40 кПа [ ]. В таких условиях коэффициент сопротивления движению ведомого колеса

|
|
|
|
|
|
|
|
|
|
Py |
|
|
|
|
pн dS y |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
fк |
|
|
s |
|
|
|
|
|
|
, |
|
|
|
(4.30) |
||||
|
|
|
|
|
|
|
|
Pz |
|
|
|
pн dS z |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
где рн - нормальное давление между колесом и грунтом; |
|
|
|
|||||||||||||||||||||||
dSy, |
dSz - проекции элементов площади контакта на плоскости, |
перпен- |
||||||||||||||||||||||||
дикулярные Оy и Оz. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Воспользовавшись величиной среднего давления и вынеся его за знак |
|||||||||||||||||||||||||
интеграла, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dS y |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
f к |
|
s |
|
|
|
|
. |
|
|
Н |
|
(4.31) |
||||
то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dS z |
|
|
|
У |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
Б |
|
|
|
||
|
|
|
|
|
|
b h |
h , а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Так как |
|
dS |
y |
|
|
dS |
z |
b a a , |
|
|
|
|
|||||||||||||
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
s |
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
й |
|
|
|
|
||||
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
h |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
fк |
|
2 |
|
|
2 |
|
, |
|
|
|
|
(4.32) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a a |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|||||||
где h , h - полная и остаточная деформац я несущего основания; |
|
|||||||||||||||||||||||||
a , |
a - длины передней и задней относ тельно оси частей контакта. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
о |
вийаботы колес величины h2 и a малы |
|||||||||||||||||
|
В большинстве реальных усл |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
по сравнению с |
|
h2 |
и |
a . Кр ме т го, |
восстановление геометрии несущего ос- |
|||||||||||||||||||||
нования происходит спус я нек т р е время после прохода колеса, поэтому |
||||||||||||||||||||||||||
задняя часть контак а колеса с грунтом оказывает незначительное влияние на |
||||||||||||||||||||||||||
условия равновес я с колесом. В связи с этим, величинами h2 и a в формуле (4.32) можно пренебречь. Тогда с небольшим увеличением значения fк можно
приблизительно |
вычислить |
по приближенной формуле |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
h2 |
|
|
|
|
|
|
|
|
о |
|
f к |
, |
|
|
(4.33) |
|||||
|
|
|
a |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
Так как (Рис.4.5) |
|
|
|
|
|
|
|
|
|
|||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
a R12 |
R1 |
h2 2 |
|
2R1 h2 |
h22 , |
(4.34) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
то, пренебрегая квадратом значения h2 , имеем |
|
|
|||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
fк |
h2 |
|
|
h2 |
|
, |
(4.35) |
|
|
|
|
|
|
2R1 h2 |
|
2R1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||