

Горные машины и оборудование
.pdf
|
|
m·g |
|
|
У |
|
|
|
φ |
Т |
|
Рисунок 4.12 – Определение составляющей силы тяжести, |
|||||
|
параллельной опорной поверхности |
|
|
||
|
|
|
Б |
|
|
4.3.10 Условия возможности передвижения машиныН |
|
||||
на колесном движителе |
й |
|
|
||
|
|
и |
|
|
|
Мобильные горные машины на колесном ходу работают в самых раз- |
|||||
личных условиях. На возможности х передвижения могут оказывать влияние всевозможные ограниченияр: габа тные, маневренные, водные, тягово-
сцепные и т.п. в реальных ситуациях пе едвижения машин их остановки как следствие невозможности пе едвижения происходят по двум основным при-
чинам: недостаток мощн или буксование ведущих колес. Такие останов-
ки бывают при не вып лнении двух основных условий возможности пере- |
|||||||
движения: достаточнос |
мощности и сцепления. |
|
|||||
Первое эт х услов й выражается соотношением |
|
||||||
|
|
|
т |
|
|
|
|
|
|
и Nд N |
PT vT |
, |
(4.64) |
||
|
|
|
|||||
|
|
из |
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
Nд |
– м щн сть, передаваемая от энергетических установок на ведущие |
||||||
кол са. |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Второе условие заключается в отсутствии полного буксования ведущих |
|||||||
п |
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
Р |
P |
f |
|
m g sin P C m |
v |
P |
f |
|
, |
(4.65) |
|
к |
|
c |
|||||||
|
z0 |
|
3 |
t p |
zв |
|
|
|
кол с, которое наступает при превышении необходимого суммарного тягового усилии предельной силы сцепления ведущих колес с несущим основанием. Выражение можно записать в виде
где Рzв – нормальная к опорной поверхности нагрузка, передаваемая ведущими колесами (сцепной вес);
fс - коэффициент сцепления между движителем и несущим основанием.
Эти условия передвижения далеко не единственные, но, как правило, они должны соблюдаться во всех случаях. Представляет некоторый интерес ситуация, когда машина на колесном движителе перемещается на горизонтальной опорной поверхности равномерно при отсутствии силы Р3. В этом случае Pzв m g , и условие достаточности сцепления принимает вид
|
c |
|
|
Pzв |
, |
|
|
(4.66) |
||
|
fк |
|
|
|
|
|
||||
|
m g |
|
|
|||||||
|
|
|
|
|
|
У |
||||
а при полноприводном движителе, когда Pzв m g |
|
|||||||||
|
c fк |
k . |
|
|
||||||
|
|
|
Т |
(4.67) |
||||||
|
|
|
|
|
|
|
|
|
|
|
При определении мощности для передвижения железнодорожного ко- |
||||||||||
лесного движителя, где коэффициент fк очень мал (менее 0,01), необходимо |
||||||||||
учитывать и сопротивление в подшипниках колесныхНпар,, т. е. при опреде- |
||||||||||
|
|
|
й |
|
|
|
||||
лении необходимого тягового усилия составляющая Р1 |
вычисляется по фор- |
|||||||||
муле |
отивления |
Б |
|
|
||||||
При определении силы |
качению в обычных колесных |
|||||||||
P |
f |
к |
f |
n |
P |
, |
|
|
(4.68) |
|
1 |
|
|
z0 |
|
|
|
|
|||
где fn – коэффициент сопротивлен я в подш пниках колесных пар. |
|||
движителях коэффициент fn не учитывается ввиду его малости по сравнению |
|||
с коэффициентом fк. |
т |
р |
|
|
|||
|
При |
|
|
4.3.11 Системы поворосопа колесных движителей |
|||
з |
|
|
|
Горные моб льные машины, как правило, в процессе движения совер- |
|||
о |
|
|
|
шают маневры. |
|
этом габариты пространства, в котором они перемеща- |
|
ются, граничены. Поэтому к механизмам их перемещения предъявляются |
|||||||
поворота |
|
|
|
|
|||
довольно жёсткие маневренные требования. Маневренные качества колесных |
|||||||
движителей цениваются, в первую очередь, угловой скоростью и радиусом |
|||||||
е |
, а также габаритами полосы движения. В горных машинах на ко- |
||||||
|
|||||||
лёсном ходу используются системы поворота, которые можно классифици- |
|||||||
Р |
|
|
|
|
|
|
|
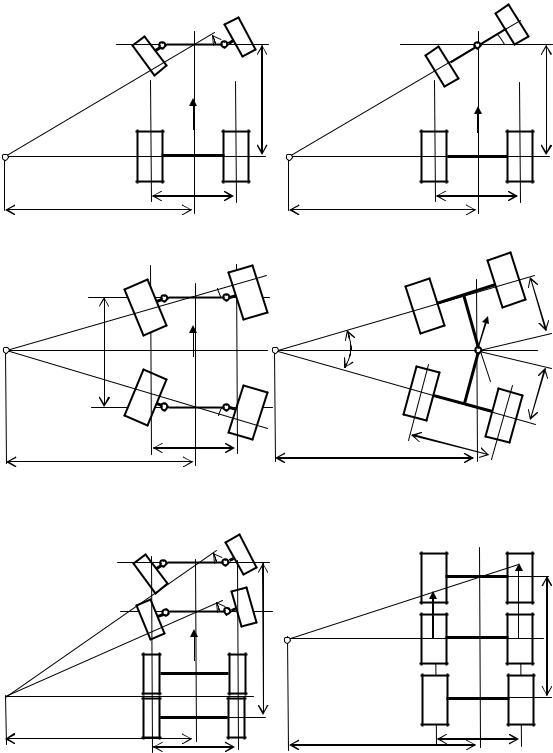
ровать по принципам изменения направления движения. В этом смысле раз- |
|||||||
личают системы поворота (Рис. 4.12) за счёт: |
|
|
|
||||
- поворота колес одной или нескольких осей; |
|
||||||
- поворота одной или нескольких осей, а также поворота полурам; |
|
||||||
- разности скоростей вращения колес противоположных бортов. |
|
||||||
Если используется первая система поворота (на рис. 4.13,а представлен |
|||||||
её самый простой вариант), то радиус и угловая скорость поворота определя- |
|||||||
ется соотношениями |
|
|
|
|
|||
|
|
v |
tg ; |
R |
a |
, |
(4.69) |
|
|
a |
|
tg |
|
||
где v – продольная составляющая скорости точки машины, лежащей на её продольной оси;
α – средний угол поворота управляемых колёс передней оси.
Колёсные машины с поворотными осями (Рис.4.13,б) используются гораздо реже по причине невысокой динамической устойчивости. Радиус и уг-
ловая скорость простейшего варианта такой системы определяется формула- |
|
|
У |
ми (4.69), в которых угол α есть угол поворота оси относительно поперечной |
|
оси машины. |
Т |
Схема поворота за счёт складывания полурам (Рис.4.13,в) используется |
|
в горных машинах сравнительно часто. Особенно это относится к погрузоч- но-доставочным машинам, как при открытой добыче, так и при подземных разработках месторождений полезных ископаемых. Радиус и угловая скорость поворота при симметричном относительно шарнира вкладывания полурам осей мостов, определяются выражениями
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
a |
|
|
|
|
, |
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 sin |
|
|
|
|
|
Б |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.70) |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
v |
sin |
|
|
, |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где v – продольная скорость мостов; |
|
|
|
й |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
а = а1 + а2 – продольная база машины; |
|
|
|
|
|
|
|
|
||||||||||||||||
|
β – угол складывания п лу ам. |
и |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
При использовании б рт в й схемы управления поворотом радиус и |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|||
угловая скорость соо ве свенно |
|
R |
|
v1 |
v2 |
|
; |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.71) |
|||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
v2 v1 |
|
, |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
rз, v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где v |
2 |
|
2 |
r |
- продольные составляющие скоростей середин |
||||||||||||||||||||
|
|
|
|
|
к2 |
1 1 |
к1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
бортов; |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
ω1, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
ω2 |
– угловые скорости вращения колёс левого (отстающего) и пра- |
|||||||||||||||||||||||
вого (забегающего) бортов; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
п |
- радиусы качения колёс левого и правого бортов. |
|
||||||||||||||||||||||
|
rк1, |
rк2 |
|
|
|||||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При совершении маневров колёсные движители тратят дополнительную мощность на их совершение. Эти дополнительные затраты зависят как от радиуса совершаемого поворота, так и системы управления поворотом.
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
β |
|
|
|
а) |
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
а |
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
C |
|
|
|
|
|
d |
|
|
C |
|
|
|
d |
У |
|
|
|
|
R |
|
|
|
|
|
|
R |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
+β |
|
|
г) |
|
|
Т |
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Н |
а1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
v |
|
|
|
|
β |
v |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
C |
|
|
а |
|
|
|
|
C |
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
-β |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
d |
|
|
|
|
R |
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
й |
|
|
|
|||
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
||
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β1 |
|
|
|
|
|
|
|
|
|
|
д) |
|
|
|
|
о |
|
|
|
|
|
|
v2 |
|
|
|
|
|
|
|
тβ2 |
|
|
|
е) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
и |
|
|
|
|
|
|
v1 |
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
v |
а |
|
|
|
|
|
|
|
||
|
|
|
|
з |
|
C |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
C |
о |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
d |
|
|
|
|
R |
|
d |
|
|||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
е |
Рисунок 4.13 – Основные системы поворота колесных машин: |
||||||||||||||
|
а) – за счёт поворота колес; |
б) – за счёт поворота оси; |
|||||||||||||
Р |
|
|
|||||||||||||
в) – все колеса управляемые («краб»); |
г) – за счёт складывания полурам; |
||||||||||||||
|
|
|
д) – комбинированная схема; |
е) – бортовой поворот |
|
||||||||||
|
|
|
|
|
|||||||||||

|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
Рисунок 4.14 - Вагон самоходный 5ВС15М (схема «краб») |
|||||||||
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
е |
Рисунок 4.15 - Самоходный вагон В15К (схема 6х3) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||
Р |
|
|
|
|
|
|
|
|
|
|
|
4.4 Гусеничные движители
4.4.1 Принципиальные схемы и принцип действия
|
В горных мобильных машинах гусеничные движители – самый распро- |
|||||||||||||||||
страненный механизм перемещения. Зачастую подачу органов разрушения |
||||||||||||||||||
массива породы также осуществляют с помощью этого механизма. Его прин- |
||||||||||||||||||
ципиальная схема приведена на рис.4.14. |
|
|
|
|
|
|
|
У |
||||||||||
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
Т |
|
|
|
|
6 |
|
|
|
|
|
|
2 |
|
|
|
4 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ω |
|
|
|
|
|
|
Б |
|
|
||||
|
|
3 |
|
|
|
|
|
|
5 |
й |
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
катки |
|
|
|
|
|
|
|
|||
|
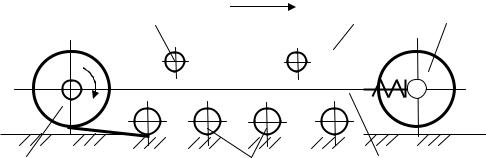
Рисунок 4.14 – Принципиальная схема гусеничного движителя: |
|||||||||||||||||
|
|
1 – рама; 2 – гусеничная цепь; |
3 – ведущая звездочка; |
|
||||||||||||||
|
4- натяжное колесо; 5 – опо ные |
|
|
; 6 – поддерживающие ролики |
||||||||||||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
Широкое распространение гусеничных движителей в качестве опорно- |
|||||||||||||||||
|
|
|
|
|
т |
рмашин обусловлено их хорошими тягово- |
||||||||||||
ходовых устройств горных |
||||||||||||||||||
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
сцепными и маневренными качествами, а также высокой проходимостью по |
||||||||||||||||||
опорным основан ям с малой несущей способностью. Гусеничные движите- |
||||||||||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ли различаются класс ф цируются по нескольким признакам и делятся на |
||||||||||||||||||
активные и пасс вные: одноопорые и двухопорные; с жесткой и балансирной |
||||||||||||||||||
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
упруг й п двеск й опорных катков; с передним и задним расположением ве- |
||||||||||||||||||
дущих зве д чек; с планетарным и дифференциальным механизмами поворо- |
||||||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
та и т.д. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ские |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При изучении гусеничных движителей будем опираться на теоретиче- |
|||||||||||||||||
Р |
основы работы таких движителей, разработанные в БНТУ проф. Ф.А. |
|||||||||||||||||
Оп йко [4.1] и нашедшие применение в решении различных прикладных задач, особенно, связанных с поворотом таких движителей.
4.4.2 Основные математические соотношения
Перемещение движителя осуществляется за счет перематывания гусеничных цепей относительно рамы. При этом различают действительную и теоретическую скорости движения, которые, как и для колесного движителя, связаны соотношением
v vT 1 . |
(4.72) |
Теоретическая скорость vT равна скорости перематывания гусеничных
цепей
vT u ,
где u зв rзв ;
ωзв – угловая скорость ведущей звездочки; rзв – делительный радиус ведущей звездочки.
но при движении по жестким опорным основаниям без какихТ-либоУзначи- тельных внешних нагрузок величина буксования очень мала и им можно пренебречь при рассмотрении кинематики. Однако в соответствии с выводом раздела 4.2 величина буксования в значительной степени определяет силу трения между гусеницей и опорной поверхностью. Взаимодействие между
При отсутствии буксования движителя действительная скорость совпадает с теоретической. В действительности буксование присутствует всегда,
гусеницами опорной поверхностью характеризуется еще рядом силовых па- |
|||||||||||
раметров, среди которых наиболее часто используются такие, как среднее и |
|||||||||||
экстремальные значения нормальных |
|
|
Н |
|
|||||||
|
|
, тяговые усилия гусеничных |
|||||||||
лент, силы сопротивления движению и т.п. |
Б |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4.4.3 Мощность для передв жен я гусеничного движителя |
|
|||||||||
|
|
|
|
|
|
|
|
давлений |
|
||
|
Для определения мощности |
услов й возможности движения машины |
|||||||||
на гусеничном движителе необходимоизнать тяговые усилия гусеничных |
|||||||||||
лент, так как мощность для п ям линейного передвижения машины, приве- |
|||||||||||
|
|
|
|
|
р |
|
|
|
|||
денная к энергетическ й ус ан вке, выражаемая в кВт, и определяется по |
|||||||||||
формуле |
|
|
о |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
TT vT |
|
|
||
|
|
|
|
т |
|
N |
, |
(4.73) |
|||
|
|
|
|
|
1000 |
||||||
|
|
|
|
|
|
|
|
|
|
||
где TT - суммарн |
ие тяговое усилие гусеничных лент; |
|
|||||||||
|
vT - те ретическая скорость передвижения; |
|
|||||||||
|
|
з |
|
|
|
|
|
|
|
|
|
|
η - КПД рив да гусеничного движителя. |
|
|
||||||||
|
|
усилия гусеничных лент |
|
|
|
|
|||||
|
Тяговые |
|
|
|
|
|
|
|
|
|
|
|
Суммарное тяговое усилие гусеничных лент должно уравновешивать |
||||||||||
|
псилы сопротивления движению, т.е. |
|
|
|
|||||||
все |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
TT |
Pi , |
|
(4.74) |
|||||
|
|
|
|
|
|
|
1 |
|
|
||
где п – число сил сопротивления движению; |
|
|
|||||||||
Р |
Pi – i-я сила сопротивления движению. |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Среди этих сил чаще всего выделяют следующие: |
|
|||||||||
|
сила сопротивления движению опорного основания; |
|
|||||||||
|
|
|
|
P 2 f |
д |
p a b , |
|
(4.74) |
|||
|
|
|
|
|
1 |
|
|
|
|
|
|
где fд – коэффициент сопротивления деформированию несущего основания. Этот коэффициент в свое время проф. Ф.А. Опейко называл коэффициентом сопротивления мятию грунта и представил его суммой двух составляющих fд’ и fд’’, которые отражают сложный характер деформации несущего основания между опорными катками;
p |
|
Pz |
|
- среднее давление гусениц на опорное основание; |
|
|||||||||||||
2a b |
|
|||||||||||||||||
Рz – проекция на нормаль к опорной поверхности равнодействующей |
||||||||||||||||||
внешних сил, действующих на машину; |
|
|
|
|
|
|||||||||||||
a, b – размеры опорной площадки гусеницы. |
|
|
|
|||||||||||||||
|
P2 |
2 fк p a b |
|
- сила сопротивления, обусловленная внутренними по- |
||||||||||||||
терями в гусеничном обводе; |
|
|
|
|
Н |
У |
||||||||||||
|
|
|
|
|
|
|||||||||||||
|
fк - коэффициент сопротивления, учитывающий внутренние потери в |
|||||||||||||||||
гусеничном обводе, прежде всего, сопротивление качениюТопорных катков |
||||||||||||||||||
по гусеничным лентам; |
|
|
|
|
|
Б |
|
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
Р3 - сила сопротивления движению, вызванная взаимодействием рабо- |
|||||||||||||||||
чих органов с массивом горной породы, а также сопротивлением движению |
||||||||||||||||||
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
||
прицепных машин; |
|
|
|
и |
|
|
|
|||||||||||
|
|
|
|
|
|
|
dv |
|
|
|
|
|
|
|
||||
|
P4 |
K Tб |
- сила сопротивления движению, вызванная трением опор- |
|||||||||||||||
ных катков о направляющие гусен чных лент. |
|
|
|
|||||||||||||||
|
Т |
|
– боковая сила, действующая на машину, например сила ветра или |
|||||||||||||||
составляющая сил тяжести п и аботе маш ны на косогоре. |
|
|||||||||||||||||
|
|
|
|
c m |
|
|
|
|
о |
|
|
|
|
|
|
|
||
|
P5 |
|
|
- составляющая силы сопротивления, |
необходимая для раз- |
|||||||||||||
|
|
|
|
|
|
|
dt |
|
|
рогании; р |
|
|
|
|
|
|||
гона машины при её |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
||
|
с – коэффициент, учи ывающий разгон вращающихся масс привода гу- |
|||||||||||||||||
сеничного движ теля (можно принимать равным 1,01…1,05). |
|
|||||||||||||||||
|
|
|
|
|
|
з |
тны; |
|
|
|
|
|
|
|
||||
|
m – масса маш |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
ускорен |
|
|
|
|
|
|
|
|
|
|
|||||
|
dv |
- |
|
|
|
|
е маш ны при ее разгоне; это ускорение можно вычис- |
|||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лить |
|
|
упр щенн й формуле |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dv |
|
v p |
, |
|
|
(4.75) |
где |
|
|
|
|
|
|
|
|
|
dt |
t p |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
tp |
– время разгона машины; |
|
|
|
|
|
|
|
||||||||||
поP m g cos |
- сила сопротивления, вызванная составляющей силы |
|||||||||||||||||
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тяж сти, параллельной опорной поверхности; |
|
|
|
|||||||||||||||
Ри т.п. |
φ – угол наклона опорной поверхности. |
|
|
|
||||||||||||||
Кроме этих сил могут действовать и другие силы, например, сила ветра |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, чтобы определить мощность для передвижения горной гусеничной машины по прямой надо знать значения ряда коэффициентов, часть которых можно найти в справочной литературе [ ], а часть можно определить и расчетным путем.
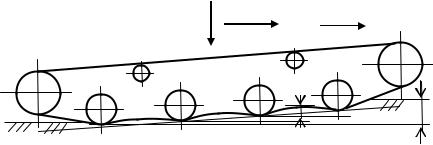
4.4.3 Коэффициент сопротивления деформации несущего основания
Так, например, коэффициент fд сопротивления деформированию опорного основания зависит от прочностных свойств и величины его деформации. Для его определения рассмотрим работу, затрачиваемую гусеницей на деформирование грунта при ее перемещении на расстояние l (Рис.4.15).
|
|
|
|
|
|
|
|
|
Pz |
Px |
|
v |
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
Рисунок 4.15 – К определению коэффициента |
|
|||||||||||
|
|
|
сопротивления деформированию грунта |
|
|
||||||||||
|
Работа этой силы |
|
|
|
|
|
й |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
A P l . |
|
|
|
(4.77) |
|
|
|
|
|
|
|
|
|
|
р |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
С другой стороны, |
|
работу, |
зат аченную на деформирование грунта, |
|||||||||||
можно выразить как |
|
|
о |
и |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
l |
|
|
|
n |
|
|
|
|
|
|
|
|
|
т |
|
p b l h pi |
i l bi , |
|
(4.78) |
|||||
|
|
|
|
|
A |
p |
dV |
|
|||||||
|
|
п рн е снование; |
0 |
|
|
|
i 1 |
|
|
|
|
||||
цей на |
|
|
|
|
|
|
|
|
|
||||||
где |
|
Pz |
з |
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|||
p |
a b |
- среднее давление гусеницы на опорное основание; |
|
||||||||||||
|
Pz – |
нормальная |
к опорной поверхности нагрузка, передаваемая гусени- |
||||||||||||
|
|
|
|||||||||||||
p – давление п д опорными катками;
λi – стрела пр веса гусеничной ленты между соответствующими опорными катками.
Так как коэффициент сопротивления деформированию несущего осно- |
||||||||
ванияпрдставляет собой отношение |
|
|
|
|
|
|||
е |
fд |
|
P1 |
, |
|
(4.79) |
||
Рто, приравняв 4. и 4. |
|
|
|
|||||
|
|
|
|
Pz |
|
|
||
и учитывая, что Pz p a b , имеем |
|
|||||||
|
|
|
|
z 1 |
|
|
||
|
|
h |
|
pi i |
|
|
||
|
fд |
|
1 |
|
. |
(4.80) |
||
|
|
|
p a |
|||||
|
|
a |
|
|
|
|||
Приравняв pi = p и Σλi = (z - 1), запишем
fд |
h |
|
z 1 |
, |
(4.80) |
|
a |
a |
|||||
|
|
|
|
|||
где z – число опорных катков; |
|
|
|
|
||
λ – среднее значение стрелы провеса гусеничной ленты между опорными катками.
второй член в (4.80) намного меньше первого, поэтому в предварительных
Формула 4.00 указывает на влияние числа опорных катков на величину коэффициента сопротивления деформированию грунта. В реальныхУмашинах
расчетах можно принимать |
|
Т |
|
|
|
|
|
||
fд |
h |
, |
|
(4.81) |
a |
|
|||
|
|
|
|
|
Остальные коэффициенты, входящие в расчетные формулы для опре-
деления сил сопротивления движению гусеничного движителя, чаще всего определяются по результатам специальных экспериментов и приводятся в
специальной литературе [ |
]. |
|
|
|
деформированиюНнесущего |
|
||||||||||||
|
|
Коэффициент сопротивления |
основания |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|||
удобно представить в виде суммы двух составляющих, первая из которых |
||||||||||||||||||
выражает силу сопротивления из-за де |
|
|
|
внешнихБсил, а вторая отражает |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ствия |
|
|
|
||||
внутренние силы, т.е. горизонтальные напряжения в опорном основании. Та- |
||||||||||||||||||
ким образом, можно записать |
р |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
f |
д |
|
f |
f |
|
, |
|
(4.82) |
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
д |
|
|
|
|
|
|
fд |
|
|
|
|
|
го |
|
|
|
|
|
|
|
|
||
где |
|
|
|
|
катками |
|
|
|
|
|
|
|
|
|
|
|||
и fд - составляющие к эффициента fд . |
|
|||||||||||||||||
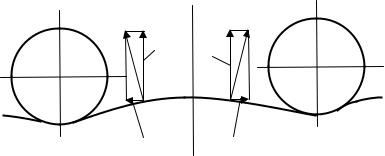
|
|
Для выяснения физическ |
|
смысла коэффициентов fд и fд , рассмот- |
||||||||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
рим напряженное сос оян е несущего основания в промежутке между двумя |
||||||||||||||||||
соседними опорными |
|
гусеницы пассивного движителя. |
|
|||||||||||||||
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
п |
з |
|
σ |
|
|
|
|
σz |
|
σ |
|
||||||
|
|
|
σz |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Р |
|
|
|
|
|
|
|
|
σу |
|
|
|
|
σу |
|
|
|
|
|
|
Рисунок 4.16 – К влиянию составляющих fд и fд коэффициента fд . |
||||||||||||||||
|
|
Рассматривая две симметричные относительно середины пролета точки |
||||||||||||||||
и считая, что в этих точках на гусеницу со стороны несущего основания дей- |
||||||||||||||||||
ствуют равные напряжения, запишем |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
z Pz ; |
y 0 |
|
|||||||
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
f |
|
|
|