

Горные машины и оборудование
.pdfУчитывая, что (4.35) дает несколько завышенные значения fк целесообразно это учитывать поправочным коэффициентом kf и пользоваться выражением
|
|
|
|
|
|
|
|
fк k f |
|
|
h2 |
, |
|
|
|
(4.36) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2R1 |
|
|
|
|
||||
где k f |
0,6÷0,9 (его меньшие значения соответствуют менее жестким коле- |
||||||||||||||||||||
сам). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Формула (4.36) может также использоваться и для определения коэф- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
фициента сопротивления качению пневматических колес по деформируемым |
|||||||||||||||||||||
опорным основаниям в тех случаях, когда деформации колес намного мень- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
ше, чем деформации несущих оснований. Обычно это имеет место при зна- |
|||||||||||||||||||||
чительных внутренних давлениях в шинах. Большинство колесных пневма- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
тических движителей горных машин удовлетворяют этому условию. Исклю- |
|||||||||||||||||||||
чение составляют лишь колесные движители высокой проходимости с не- |
|||||||||||||||||||||
большим внутренним давлением в шинах (меньше 20 кПа). |
|
|
|||||||||||||||||||
гласно которой |
|
|
|
|
|
|
|
|
несущей |
|
|
|
|||||||||
|
В таких ситуациях имеет место значительное деформирование, как не- |
||||||||||||||||||||
сущего основания, так и самого колеса. Для определения деформации пнев- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
||||||||
матического колеса под нормальной к |
|
|
|
|
|
|
|
поверхности нагрузкой ис- |
|||||||||||||
пользуется несколько зависимостей [ |
|
]. Самая простая из них линейная, со- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
колеса |
h |
|
Pz , |
|
|
|
(4.37) |
||||||||
|
|
|
|
|
от |
|
|
1 |
|
|
Cz |
|
|
|
|
||||||
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где Сz - радиальная жес кос ь |
|
|
|
(шины). |
|
|
|
|
|||||||||||||
|
|
|
зав |
|
|
|
|
Pzn |
|
|
|
|
|||||||||
|
Значение Cz |
|
с |
давления в шине и её конструкций. Ориентиро- |
|||||||||||||||||
вочно в первом пр бл жен и её можно определить для нормальных условий |
|||||||||||||||||||||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
работы шин исполь уя справочные данные каталогов заводов-изготовителей |
|||||||||||||||||||||
|
п |
|
|
|
|
|
Cz |
|
|
|
|
|
|
|
|
|
|
|
|
(4.38) |
|
|
|
|
|
|
|
|
|
rc |
rст |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Значения Pzn, rc, rст, обычно приводятся в технических данных шин. |
|||||||||||||||||||||
где Pzn |
- номинальная грузоподъемность шины; |
|
|
|
|
||||||||||||||||
Р |
rc, |
rст - соответственно свободный и статический её радиусы. |
|
||||||||||||||||||
|
|
||||||||||||||||||||
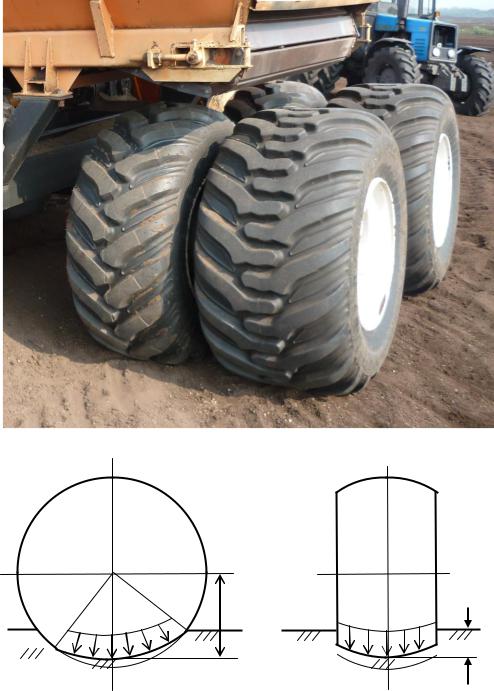
Деформации несущего основания (дороги) зависят как от его физикомеханических характеристик, так и от размеров и формы пятна контакта, величины нормальных напряжений между колесом и опорной поверхностью, а также и от давления в шине. (Рис. 4.8).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
h2 |
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
з |
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pк |
|
|
rcт |
|
|
|
|
|
|
|
pк |
|
|
|
|
|||
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
Рисунок 4.8 – Взаимодействие пневматического колеса |
|
||||||||||||||||||
п |
|
с деформируемым несущим основанием |
|
|
|
|
||||||||||||||
еМаксимальная нормальная деформация несущего основания может в |
||||||||||||||||||||
этом случае вычисляться по формуле [ |
] |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 1 2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
h |
|
|
|
2 |
|
|
p |
в |
r . |
|
|
|
(4.39) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
2m |
|
|
E2 |
|
|
|
c |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где рв - давление воздуха в шине.
Эта формула предложена проф. Ф.А. Опейко [ ] для определения деформаций торфяных залежей под колесными машинами на пневматических шинах. Средняя деформация несущего основания при этом принимается равной двум третьим от максимальной, т. е.
|
2 |
|
|
4 |
|
1 2 |
|
|
|
|
|
|
|
|
|
h |
|
h |
|
|
|
2 |
|
|
p |
|
r . |
|
|
(4.40) |
|
|
|
|
|
|
|
|
|
|
|||||||
2 |
3 2m |
|
3 |
|
E2 |
|
|
|
в |
|
c |
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приведенные зависимости получены на основании решений контакт- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
ных задач теории упругости, полученных Герцем [ |
]. Реальные несущие ос- |
||||||||||||||
нования, по которым перемещаются горные машины, различаются по своим |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
физико-механическим свойствам как качественно, так и количественно. Это |
|||||||||||||||
не позволяет охватить все возможные ситуации взаимодействия колеса с не- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
сущим основанием единой функциональной зависимостью. Поэтому суще- |
|||||||||||||||
ствует много подобного типа зависимостей [ |
|
, |
, |
], которые в конкретных |
|||||||||||
ситуациях дают более точные результаты. |
|
|
олее того, задача исчисления |
||||||||||||
напряжений и деформаций в контакте колеса с несущим основанием реали- |
|||||||||||||||
зована в ряде инженерных программных сред [ |
]. Вместе с тем, следует учи- |
||||||||||||||
тывать, что более сложные функциональные зависимости требуют большего |
|||||||||||||||
числа физико-механических характер ст к колеса и опорного основания, а |
|||||||||||||||
численные способы исследования |
|
х взаймодействия сопряжены с большим |
|||||||||||||
объемом вычислений и обусловленной эт м возрастанием погрешности ре- |
|||||||||||||||
зультата. С целью оценки влияния |
|
исновных характеристик пневматического |
|||||||||||||
колеса и несущего осн вания на величину деформации последнего в [ ] |
|||||||||||||||
предлагается формула |
|
|
р |
|
|
|
|||||||||
о |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
P3 |
C |
|
|
|
||||
|
|
|
|
|
|
|
|
1 |
|
|
z |
|
|
||
|
|
|
|
|
|
h |
|
|
4 |
|
z |
|
, |
(4.41) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
т2 |
b |
|
|
2rc |
|
|
|
|||
|
|
|
и |
E |
|
|
|
|
|
||||||
где b B 2 |
|
|
|
|
|
|
|
|
|
||||||
- ширина профиля шины. |
|
|
|
|
|||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
4.3.8 |
|
сечения колесного движителя |
|
|||||||||||
|
|
Ядро |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В ртикальные нагрузки на каждое колесо движителя определяют |
||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
обычно из условий равновесия или уравнений движения машины. При этом |
|||||||||||||||
используют и различные другие условия, например, совместность деформа- |
|||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ций шин и т.п. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
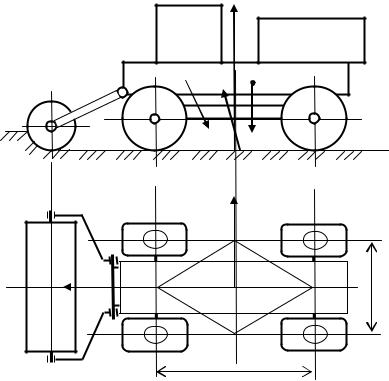
Р |
Для простейшего двухосного колесного движителя (Рис. 4.9) нормаль- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ные к опорной поверхности нагрузки находятся из уравнений равновесия машины в вертикальной плоскости.
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
Р |
|
mq |
|
У |
|
|
|
|
|
|
|
|
|
x |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
y |
|
|
|
|
|
Тd |
||
|
|
|
|
|
|
|
|
Н |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
a |
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.9 - Расчетная схема двухосной машины |
|
|
|||||||
|
Эти условия записываются в в де |
й |
|
|
|
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
и |
, |
|
|
|
|
|
|
|
|
|
|
|
Pzi Rz |
|
|
|
||
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
р |
|
xд , |
|
|
|
||
|
|
|
|
|
M 0 y Pzi Rz |
|
|
(4.42) |
||||
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
0x Pzi |
Rz yд , |
|
|
|
|
|
|
|
|
|
M |
|
|
|
||||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
где n – |
|
колес ходового устройства машины; |
|
|
|
|||||||
|
Pzi |
– н рмальнаяик опорной поверхности нагрузка на i-е колесо; |
||||||||||
|
Rz |
– |
бщая реакция опорной поверхности на машину (равнодействую- |
|||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
щая всех н рмальных реакций колес); |
|
|
|
|
|
|||||||
|
xд, yд |
– координаты центра давления; |
|
|
|
|
||||||
|
|
число |
|
|
|
|
|
|
|
|
Ox и Oy. |
|
|
MOy(Pzi), MOx(Pzi) – моменты внешних сил относительно осей |
|||||||||||
Конкрптный вид этих уравнений зависит от конструкции ходового устрой- |
||||||||||||
ства, подвески колес, вида рабочего оборудования и ряда других факторов, |
||||||||||||
характер |
действия которых обычно учитывается в дополнительных уравне- |
|||||||||||
ниях к системе (4.42). |
|
|
|
|
|
|
|
|
||||
Р |
Работа колесного движителя существенно зависит от распределения |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
нагрузок по колесам, т. е. от положения центра давления. |
|
|
|
|||||||||
|
На машину действует сила тяжести, нагрузки со стороны разрабатыва- |
|||||||||||
емой породы Р и реакции опорной поверхности на колеса. Под действием |
||||||||||||
этих сил она находится в равновесии. Для нормальной работы ходового |
||||||||||||
устройства необходимо, чтобы все колеса передавали нагрузку на опорную |
||||||||||||

поверхность. Выполнение этого условия обеспечивается тогда, когда центр давления находится в пределах ядра сечения опорной поверхности. Размеры и форма ядра сечения, в основном зависит от типа колес (жесткие, упругие) и подвески. Для определения его формы и размеров определим экстремальные значения давления по формуле (1.17)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
M |
|
|
|
|
M y |
|
|
|
|
|
У |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pmax |
z0 |
|
|
x |
|
|
|
Wy |
, |
|
|
|
|
|
(4.43) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
min |
|
|
|
S0 |
|
|
|
|
Wx |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
где Pz0 – общая нормальная к опорной поверхности нагрузка машины на |
|||||||||||||||||||||||||||||||||||||||||||||
опорное основание; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
S0 – суммарная площадь контакта колес с опорной поверхностью; |
|
|||||||||||||||||||||||||||||||||||||||||||
|
Mx |
, My |
|
– моменты внешних сил относительно соответствующих осей; |
|||||||||||||||||||||||||||||||||||||||||
|
Wx , |
Wy |
– моменты сопротивления опорной площади относительно тех же |
||||||||||||||||||||||||||||||||||||||||||
осей. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для равных по площади контактных площадок двухосной машины |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S0 4 Sк , |
|
|
|
|
|
|
|
|
Б |
|
|
(4.44) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
||||||||
где Sк – площадь контакта одного колеса. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
Моменты сопротивления опо ной площади движителя |
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Wx |
|
|
|
т |
Wy |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
(4.45) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
x |
, |
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рmax |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
инерции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
где Ix , |
Iy |
– момен ы |
|
нерцииоопорной площади относительно соответству- |
|||||||||||||||||||||||||||||||||||||||||
ющих осей; |
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
xmax , |
ymax |
– макс мальные значения координат контактных площадок. |
||||||||||||||||||||||||||||||||||||||||||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
М менты |
|
|
|
|
|
|
|
|
|
, |
|
учитывая малость контактных площадок колес по |
||||||||||||||||||||||||||||||||
сравнению с бщими размерами опорной площади ходового устройства, вы- |
|||||||||||||||||||||||||||||||||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
числяем |
у р щенным формулам |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Р |
|
|
|
|
|
|
I x |
4 S |
к |
|
а |
2 |
; |
|
|
|
|
|
|
|
|
I y |
4 Sк |
d |
2 |
. |
|
|
(4.46) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
4 |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Примем |
|
y |
|
|
|
a 2 , |
|
x |
|
|
|
|
|
|
d 2 |
|
. Тогда |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
е |
|
|
|
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Wx |
2 a Sк ; |
|
Wy |
2 d Sк . |
|
|
(4.47) |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Pz0 yд |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Учитывая, |
что |
|
|
M x |
|
|
, |
|
|
|
|
M y |
|
|
Pz0 |
xд |
и подставив эти значения, |
|||||||||||||||||||||||||||
а также значения Wx |
|
и |
|
Wy |
|
|
в (5) и принимая во внимание то, что на границе |
||||||||||||||||||||||||||||||||||||||
ядра сечения |
pmin 0 , имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
0 |
Pz0 |
|
Pz0 yдм |
|
|
Pz0 xдм |
(4.48) |
||||||
|
|
2 а Sк |
2 d Sк |
||||||||||
|
4 Sк |
|
|
|
|
||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
yдм |
|
|
|
xдм |
|
|
|
|
|
0 |
|
|
|
|
|
|
, |
(4.49) |
||||
|
2 |
а |
|
d |
|||||||||
|
|
|
|
|
|
|
|
||||||
где хдм , удм – координаты границ ядра сечения. |
У |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Соотношение (4.49) указывает на то, что контур ядра сечения колесной |
|||||||||||||
двухосной машины на жестких колесах ограничен прямыми линиями. Ядро |
|||||
|
|
|
Т |
|
|
сечения представляет собой ромб с диагоналями, равными d и a |
(см. рис. |
||||
4.9). Максимальные значения границ ядра сечения |
Н |
|
|
||
|
|
|
|
||
xд. max d 2 , |
Б |
|
|
(4.50) |
|
yд. max a 2 . |
|
|
|
||
|
й |
|
|
|
|
Таким же образом определяем размеры ядра сечения трехосного и четырехосного хода (рис.4, а,б). Колесные машины на пневматических шинах и
с упругой подвеской колес имеют ядро сечения другой формы и больших |
|||||||||||||||||||||||
размеров. Поэтому допустимое положен е центра давления для жестких ко- |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
||||||
лесных машин тем более допуст мо для маш н на пневматических шинах с |
|||||||||||||||||||||||
упругой подвеской колес. |
о |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Применяя формулу (4.43) дляит ехосной и четырехосной машин с |
||||||||||||||||||||||
жесткими колесами и п |
|
|
|
|
|
яя п следовательность определения размеров |
|||||||||||||||||
|
|
|
|
вт |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ядра сечения двухосной машины, имеем: |
|
|
|
4 |
(4.51) |
||||||||||||||||||
|
|
|
машины 4 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
– для трехосной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
з |
|
I x |
a2 |
4 Sк ; |
I y |
d 2 |
6 Sк ; |
|||||||||||||
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
условие |
|
|
|
Wx 2 a Sк ; |
|
Wy 3 d Sк |
|||||||||||||||||
оравенства нулю минимального значения р |
|
|
|||||||||||||||||||||
|
п |
|
|
|
0 |
|
|
Pz0 |
|
|
Pz0 yдм |
|
Pz0 xдм |
|
|||||||||
|
|
|
|
|
|
|
|
|
6 Sк |
|
2 a Sк |
|
|
3 d Sк |
|||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
1 |
|
|
yдм |
|
|
2 xдм |
, |
|
|
(4.52) |
|||||
|
|
|
|
|
|
3 |
a |
|
3 d |
|
|
||||||||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xд max |
d 2 ; |
|
|
|
|
|
yд max a 3 . |
(4.53) |
||||||||||||
|
|
а |
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
a |
У |
|
|
|
|
|
|
|
|
|
|
а/3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
||
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
x |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
Н |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Рис. 4.10 - Ядра сечения трехосной (а) и четырехосной (б) машин |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|||||
|
– для четырехосной машины |
|
|
|
й |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
a4 |
|
|
|
|
a2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
I x 4 |
Sк |
4 |
Sк a |
2 |
Sк |
|
|
1 |
5 |
a |
2 |
Sк ; |
|
|
||||||||||
|
|
|
4 |
16 |
|
1 |
4 |
|
4 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
a Sк ; |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Wx |
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
т |
|
|
d 2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
8 |
S |
к 2 d |
|
Sк ; |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
и |
|
I y |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
з |
|
|
|
|
|
|
Wy |
4 d Sк . |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
0 |
Pz0 |
|
2 Pz0 yдм |
Pz0 xдм , |
|
|
|
|
|
|
|||||||||||
|
п |
|
|
|
|
|
|
8 Sк |
|
5 a Sк |
|
4 d Sк |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
xд max d 2 ; |
|
|
yд max |
5 а . |
|
|
|
|
|
(4.54) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Представляет практический интерес определение размеров ядра сече- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния колесного хода с шарнирным соединением переднего моста с рамой, зад- |
|||||||||||||||||||||||||||
ний мост к которой крепится жестко (рис. 5). Так как для колесного хода |
|||||||||||||||||||||||||||
условие |
pmin 0 равносильно условию равенства нулю нагрузки на одно из |
||||||||||||||||||||||||||
колес, то для определения размеров ядра сечения определим зависимость ре- |
|||||||||||||||||||||||||||
акций опорной поверхности на все колеса от координат центра давления. |
|||||||||||||||||||||||||||
|
Суммарные реакции на колеса переднего и заднего мостов |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
R |
п |
P |
yд |
; |
|
R |
з |
|
P |
|
|
a yд , |
|
|
|
|
(4.55) |
|||||||||
|
|
|
|
|
|
z0 |
|
a |
|
|
|
|
|
|
z0 |
|
|
a |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Rп Rпл Rпп – общая реакция грунта на передний мост; |
|
|
|
||||||||||||||||||||||||||||
|
Rз Rзл Rзп |
– то же на задний мост; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Rпл, Rзл, Rпп, |
Rзп, – реакции опорного основания на колеса левого и право- |
|||||||||||||||||||||||||||||
го бортов соответственно переднего и заднего мостов. |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
R |
|
R |
P |
|
|
yд |
|
; |
|
|
|
|
|
|
|
|
|
(4.56) |
||||
|
|
|
|
|
|
|
|
|
пл |
|
пп |
|
z0 |
|
2 а |
|
|
|
|
|
|
|
|
|
|
|
У |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
R |
|
|
P |
|
a y |
д |
d |
2 x |
|
|
|
; |
|
|
Т |
|
||||||
|
|
|
|
|
|
|
|
|
зл |
|
|
|
|
|
|
|
д |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
z0 |
|
a |
|
|
|
2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.57) |
|||
|
|
|
|
|
|
|
|
|
R |
|
|
P |
|
a yд |
d2 |
x |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
2 |
|
|
. |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
зп |
|
z0 |
|
|
|
|
|
д |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
||||||
|
Приравняв к нулю эти реакц , убеждаемся, что ядро сечения такого |
||||||||||||||||||||||||||||||
хода – прямоугольник со сторонами d2 |
|
|
|
а, т. е. максимально возможные ко- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|||||||
ординаты центра давления для такого колесного хода |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
xд max |
|
и |
|
|
0 ; |
|
yд max |
а . |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
d 2 ; |
|
yд min |
|
|
|
|
|
(4.58) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
о |
|
d1 |
|
|
|
|
|
|
|
|
|
|
|
Sк1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
т |
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sк2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
хд |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Рис. 4.11 - К определению размеров ядра сечения |
|
|
||||||||||||||||||||||||||
|
|
двухосного колесного движителя с шарнирным соединением |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
переднего моста и рамы |
|
|
|
|
|
|
|||||||||||||||||
Определим размеры пятна контакта колеса, считая, что величины Pzi
определены. |
|
|
|
|
|
|
|
|
|
|
Площадь пятна контакта колеса с опорным основанием зависит от его |
||||||||||
конструкции и величины нормальной нагрузки |
Pzi . Форма пятна контакта |
|||||||||
также весьма различна и может меняться от круга до прямоугольника. Чаще |
||||||||||
всего пятно контакта имеет форму овала и его площадь может быть опреде- |
||||||||||
лена по формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sк |
a b |
, |
|
Т |
(4.59) |
|
|
|
|
|
|
|
|
|
|
|
|
где a и b - полуоси элипcа (реально это половины длины и ширины пятна |
||||||||||
|
|
|
|
|
|
|
|
Н |
|
|
контакта). Для практических расчетов размер b принимается равнымУполо- |
||||||||||
вине ширины беговой дорожки шины, а размер а вычисляется по формуле |
||||||||||
|
|
|
a r 2 |
r |
h |
2 , |
|
|
(4.60) |
|
|
|
|
|
c |
c |
к |
|
|
|
|
|
|
|
|
й |
|
|
|
|
||
где rc – свободный радиус колеса; |
|
|
|
Б |
|
|
||||
hк – деформация шины. |
|
и |
|
|
||||||
|
|
|
|
|
|
|
|
|||
Деформацию hк шины можно выч сл ть, используя выражение |
|
|||||||||
|
|
р |
|
|
|
|
|
|
|
|
|
о |
hк Pz cz |
, |
|
|
|
(4.61) |
|||
где сz - радиальная жестк сть шины. |
|
|
|
|
|
|
|
|||
т |
|
|
|
|
|
|
|
|
|
|
Значения радиальн й жестк сти шин зависит от типа и размеров шины, |
||||||||||
а также внутреннего давления в здуха. При номинальном давлении радиаль- |
||||||||||
и |
|
|
|
|
|
|
|
|
|
|
ная жесткость может бы ь найдена из справочных данных каталогов заводов- |
||||||||||
|
|
|
|
з |
|
|
|
Pzп |
|
|
|
|
|
о |
cz |
|
|
|
, |
(4.62) |
|
|
|
|
rc |
rcт |
||||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
rc – свободный радиус шины; |
|
|
|
|
|
|
|||
|
п |
|
|
|
|
|
|
|
||
|
rcт |
– статический радиус при нормальной нагрузке; |
|
|||||||
|
zn |
– номинальная грузоподъемность. |
|
|
|
|||||
где |
|
|
|
|
|
|
|
|
||
|
|
Определив давление колес на опорную поверхность p Pz Sк |
можно |
|||||||
проверить возможность эксплуатации движителя в конкретных условиях. |
||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
изготовителей ш н, где обычно указываются номинальная грузоподъемность, давление во духа в шине, свободный и статический радиусы. В этом случае радиальная жесткость
Чаще всего это делается сопоставлением расчетных давлений с допустимыми. На дорогах с твердым покрытием это требование обычно выражается допускаемой нагрузкой на ось.
4.3.9 Мощность для передвижения колесного движителя
Необходимая для передвижения горной машины на колесном ходу мощность вычисляется по формуле
|
|
|
|
|
|
|
|
|
|
|
|
N |
PT vT |
, |
|
|
(4.63) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
||
где РТ - суммарные тяговые усилие ведущих колес движителя; |
|
||||||||||||||||||
|
vT - теоретическая скорость движения; |
|
|
|
|||||||||||||||
|
η - КПД привода ведущих колес; |
|
|
|
|
|
|
|
|||||||||||
|
1000 – переводной коэффициент для получения результата вычисленийУв |
||||||||||||||||||
кВт. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Этот коэффициент будем использовать во всех случаяхТвычисления |
||||||||||||||||||
мощности, так как почти все механизмы в горных машинах потребляют |
|||||||||||||||||||
мощности, величина которых составляет десятки, сотни и тысячи кВт, а вхо- |
|||||||||||||||||||
дящие в формулу величины измеряются в системе СИ. |
Н |
|
|||||||||||||||||
|
|
||||||||||||||||||
|
Суммарное тяговое усилие ведущих колес машины должно быть не |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
меньшим, чем общая сила сопротивления движению, т.е. |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
n |
йP , |
|
(4.64) |
||
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
i |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|||
где Рi - отдельные составляющие бщей силы сопротивления движению; |
|||||||||||||||||||
|
п - число составляющих с пртивлений движению. |
|
|
||||||||||||||||
|
Это число зависит |
к нкретных условий движения машины. Для гор- |
|||||||||||||||||
ных машин, |
скорос |
|
|
|
|
о |
|
|
|
|
|
|
|
||||||
|
дв жения которых, как правило, невелики, а пути пе- |
||||||||||||||||||
ремещения расположенытвне стационарной сети дорог, чаще всего необхо- |
|||||||||||||||||||
димо учитывать следующ е силы: |
|
|
|
|
|
|
|
||||||||||||
|
P P |
|
f |
к |
- |
|
|
сопротивления деформированию несущего основания |
|||||||||||
|
1 |
z0 |
|
|
сила |
|
|
|
|
|
|
|
|
||||||
и колес; |
|
з |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
P2 m g sin |
- составляющая силы тяжести, параллельная опорной по- |
|||||||||||||||||
|
|
, и возникающая при движении машины в гору (Рис.4.12); |
|
||||||||||||||||
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
m - масса машины; |
|
|
|
|
|
|
|
|
||||||||||
|
пφ - угол наклона опорной поверхности к горизонту. |
|
|||||||||||||||||
|
Р3 |
– сила сопротивления, возникающая вследствие рабочих органов |
|||||||||||||||||
верхностимашины с горной породой (сопротивление подаче, крюковое усилие и т.п.); |
|||||||||||||||||||
Р |
P C m |
dv |
C m |
v |
|
- сила инерции, возникающая при разгоне машины, |
|||||||||||||
|
|
||||||||||||||||||
4 |
|
|
|
dt |
|
|
|
t p |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где С – коэффициент, учитывающий разгон вращающихся масс; t - время разгона.