

Горные машины и оборудование
.pdf
|
|
|
4d 2 a2 3 Py |
|
|
p p |
2 |
f a 2 b |
|
|
|
4M d |
|
||||||||||||||||
e1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
; |
||||
|
32 f |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
4d 2 |
a 2 |
|
|||||||||||
|
|
|
p d 3 b |
|
|
|
|
2 |
4d |
2 |
a |
2 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
4d 2 a 2 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.107) |
||||
|
|
|
|
Py |
|
|
p p |
2 |
f a 2 b |
|
|
4M d |
|||||||||||||||||
e2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||
32 f |
|
2 |
|
|
|
|
|
|
|
|
|
|
4d |
2 a |
|
|
|||||||||||||
|
|
p d 3 b |
|
|
|
2 |
4d |
2 |
a |
2 |
|
|
|
2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
При больших значениях сдвигающих сил для достижения решения |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
уравнений равновесия гусеничной машины при повороте следует применить |
||||||||||||||||
ПЭВМ с программным обеспечением для решения систем нелинейных урав- |
||||||||||||||||
нений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.4.7 Мощность для выполнения поворота гусеничной машины |
|||||||||||||||
|
и условия возможности его выполнения |
|
||||||||||||||
|
Двухгусеничная машина может выполнять поворотыНв нескольких ре- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|||
жимах: с заданным и скоростями забегающей игусеницы от привода; при за- |
||||||||||||||||
торможенной отстающей гусенице; в условиях |
Бизменения скоростей отста- |
|||||||||||||||
ющей и забегающей гусениц. В том случае, когда обе гусеницы работают в |
||||||||||||||||
тяговом режиме мощность для |
поворота |
рассч тывается по формуле |
||||||||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
T1T |
u1 T2T u2 |
|
|
|
||||
|
|
|
|
|
|
N |
|
и |
, |
|
(4.108) |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
т |
|
|
|
1000 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Т1Т, |
Т1Т |
– тяговые усилия забегающей и отстающей гусениц, соответ- |
||||||||||||||
ственно. |
|
|
и |
о |
|
|
|
|
|
|
|
|
||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если отстающая гусеница заторможена или отключена от двигателя, то |
|||||||||||||||
мощность определяется выражением |
|
|
|
|
|
|||||||||||
|
Дляоределения тяговых усилий |
|
|
|||||||||||||
|
гусеничных лент при повороте обра- |
|||||||||||||||
|
п |
|
|
|
|
|
N |
T2T u2 . |
|
|
(4.108) |
|||||
е |
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
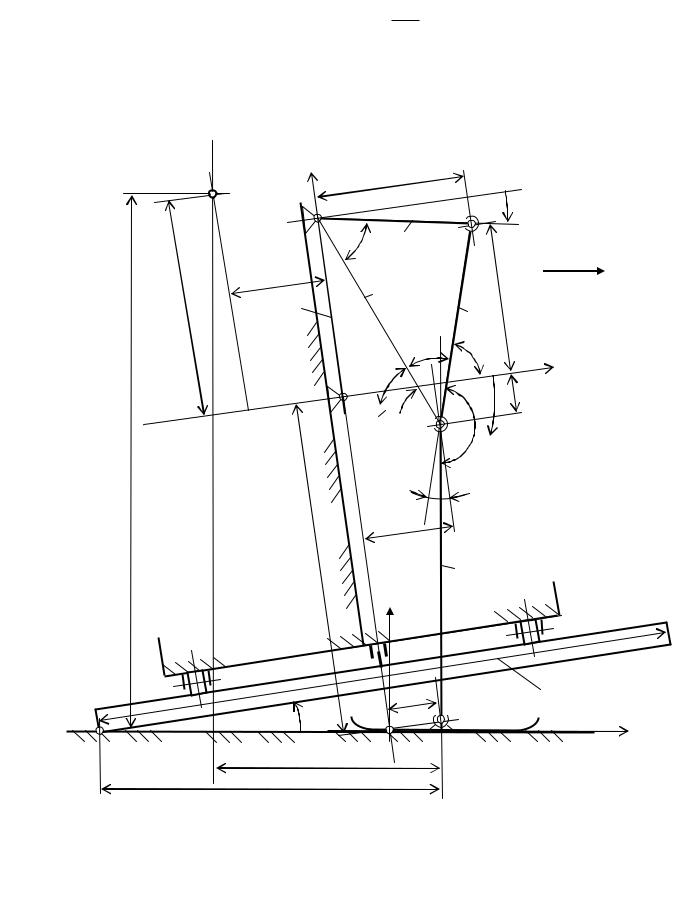
тимся к рисунку 4.21 и составим схему, подобную рис.4.18. |
|
|||||||||||||||
Р |
Тяговые усилия гусеничных лент при повороте, согласно этих рисун- |
|||||||||||||||
|
||||||||||||||||
ков, |
|
|
|
T1T T1y fд p1 a b k p1 a b k T1б , |
||||||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.106) |
|
|
|
|
|
T2T T2 y fд p2 a b k p2 a b k T2б , |
|||||||||||
где Т1у, |
Т2у – продольные составляющие сил трения между гусеницами и |
|||||||||||||||
грунтом; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Т1б, Т2б – арифметические суммы боковых сил, действующих на гусеничные цепи;
k - коэффициент сопротивления движению опорных катков по гусеничным цепям за счет действия боковых сил (учитывает потери на трение между боковыми поверхностями катков и направляющими гусеничных цепей).
|
|
|
а) |
|
|
|
|
fд p2ab |
|
|
fк p2ab |
|
|
|
k Tб |
|
|
|
|
|
|
|
|
|
У |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т2у |
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
||||
|
|
|
б) |
|
|
|
|
|
|
|
p ab |
|
|
f |
p ab |
|
|
|
k Tб |
|
Н |
|
|
|
||||||||||||
|
|
|
|
|
|
|
f |
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
к |
1 |
|
|
|
|
|
Б |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т1у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Рисунок 4.20 – К пределению тяговых усилий |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
гусеничных цепей при повороте: |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
о |
|
|
|
б) – отстающая гусеница |
|
|
|||||||||||||||||||||
|
|
|
|
|
а) – забегающая гусеница; |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Продольные составляющие сил трения между гусеничными лентами и |
|||||||||||||||||||||||||||||||||||
опорным |
|
сн ваниеми, а также арифметические суммы боковых сил (сохраня- |
||||||||||||||||||||||||||||||||||
ем название, |
данн е проф. Ф.А. Опейко), |
действующих между гусеничными |
||||||||||||||||||||||||||||||||||
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
це ями и |
|
|
рными катками согласно рис.4.21, определяются приближен- |
|||||||||||||||||||||||||||||||||
ными |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
формулами |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
f p1 a b |
|
|
2e1 |
1 |
|
; |
|
T |
|
|
|
|
f p2 a b |
|
|
|
2e2 |
|
1 |
|
; |
(4.107) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
е1y |
|
|
|
3 |
|
|
2 |
|
|
|
|
|
2 y |
|
|
|
3 |
|
|
|
|
2 |
|
|
|
|
|
|
||||||||
Р |
|
|
|
|
|
|
a |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
e1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e2 |
|
|
|
|||
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f p a b |
|
2a |
|
ey |
|
f p |
2 |
a b |
|
2a |
|||||
T1б |
|
1 |
|
|
|
|
|
|
; |
T2б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
3 |
|
|
a 2 |
2 |
|
e1 |
|
|
3 |
|
|
|
a 2 |
2 |
|
|
|
|
|
3 |
|
e1 |
|
|
|
|
|
|
|
|
3 |
|
e2 |
|
|
|
9 |
|
|
|
|
|
|
9 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
eey . (4.108)
2

Последние формулы следуют из уравнений равновесия (4.99) двухгусеничной машины при повороте и упрощены путем пренебрежения некоторыми малыми величинами. При их использовании необходимо учитывать,
что смещение может быть положительным (в сторону поворота), отрица- |
||||||||||||||||||||||||||||||||||||||||||
тельным и при определённом сочетании внешних нагрузок и размеров гусе- |
||||||||||||||||||||||||||||||||||||||||||
ничного хода - нулевым. При положительных смещениях центра вращения |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
||||
отстающей гусеницы Т1у |
имеет отрицательное направление, т. е. эта сила пе- |
|||||||||||||||||||||||||||||||||||||||||
редвигает гусеничную цепь, поэтому её необходимо притормаживать. Тор- |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т2 |
|
|
|
|
||||
мозное усилие для остановки отстающей гусеницы, как следует из (4.107) |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f p a b |
|
|
2e |
|
|
|
|
|
p a b |
|
|
|
|
|
|
p a b |
|
2a |
|
ey |
||||||||||||||||||
T |
|
|
|
|
1 |
|
|
|
|
|
1 |
|
1 |
f |
k p a b |
|
1 |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
1тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
3 |
|
|
|
a |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
a |
|
2 |
e1 |
|||
|
|
|
|
|
|
|
|
|
|
|
e1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
e1 |
|
|
||||||
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
(4.109) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Это усилие реализуется обычно в приводе ведущих звёздочек гусениц, |
|||||||||||||||||||||||||||||||||||||||
тормозной момент на которых |
|
|
|
|
|
гусеничная |
|
Б |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
Войти в состояние |
|
|
|
ота |
|
машина может только при со- |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MT |
T1p r , |
|
|
|
|
|
|
|
|
(4.110) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пово |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
блюдении некоторых усл вий, а именно, при достаточности мощности от |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
энергетических установ к, передаваемой на гусеничный ход, а также при от- |
||||||||||||||||||||||||||||||||||||||||||
сутствии полного буксования забегающей гусеницы. Эти условия обычно за- |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
писываются в в де |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
T1T u1 T2T u2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
(4.111) |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
N |
T2T u2 |
|
при Т1у < 0. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Р |
|
|
Эти формулы выражают условие достаточности мощности. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
Второе условие выражается соотношением |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
T2 y |
|
f p2 a b , |
|
|
|
|
|
|
|
|
|
|
(4.112) |
|
||||||||||||||
или используя приближённую формулу для вычисления Т2у |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
e2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
|
|
|
|
|
|
|
|
(4.113) |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
a |
2 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||

Отношение
|
|
|
|
|
|
|
|
|
3 |
|
a 2 |
|
e22 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
9 |
|
2 |
|
|
|
(4.114) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2e2 |
|
a |
2 |
e22 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
9 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
называют коэффициентом запаса сцепления при повороте и условие доста- |
||||||||||||||||||||
точности сцепления записывают в виде |
|
|
|
|
|
|
|
У |
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
2 1 |
. |
|
|
|
Т |
(4.115) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.5 Шагающие механизмы перемещения
Появление таких необычных и экзотических механизмов передвижения горных машин обусловлено, прежде всего, необходимостью повышения их
производительности. Это, в свою очередь, потребовало увеличения энерго- |
||||||
вооруженности и массы машин. Традиционные колесные и гусеничные |
||||||
опорно-ходовые устройства позволяли обеспечить допустимые , особенно на |
||||||
|
|
|
|
|
|
У |
слабых несущих основаниях, давления на последние. Шагающие механизмы |
||||||
перемещения, позволившие благодаря использованию большой по размерам |
||||||
|
|
|
|
Т |
||
опорной базы, обеспечить сравнительно небольшие, порядка 250-1000 кПа, |
||||||
давления на опорные поверхности, появились именно в горных машинах. В |
||||||
|
|
|
Н |
|
||
последнее время шагающие механизмы перемещения получают применение |
||||||
и в других областях производства (робототехнические системы). |
|
|||||
Вместе с тем, следует отметить, что появление таких механизмов пере- |
||||||
|
|
Б |
|
|
|
|
мещения в первую очередь связано с производством открытых горных работ |
||||||
в больших объёмах. Такие механизмы перемещения применяются в драглай- |
||||||
|
|
|
|
3 |
. Существуют |
|
нах массой более 10 000 тонн и объёмом ковша более 150 м |
||||||
|
й |
|
|
|
|
|
различные системы обеспечения шагающего перемещения подобных машин |
||||||
начали |
|
|
|
|
|
|
– чисто механические, электромеханические, гидромеханические и т. п. |
||||||
Шагающие механизмы подобного т па (кривошипно-рычажные, экс- |
||||||
р |
|
|
|
|
|
|
центриковые) появились тогда, когда |
|
создавать экскаваторы высокой |
||||
производительности с большим объёмом ковша, а общая масса таких машин |
|||||||||
|
|
|
|
|
|
во |
|
||
приближалась к 1000 тонн. Самый мощный шагающий экскаватор-драглайн |
|||||||||
«Биг Маски» 4250W был с здан вто ой половине 20-го века в США. Этот |
|||||||||
|
|
|
|
|
т |
|
|||
гигант весил 13 500 онн, имел к вш емкостью 168 м3, который подвешен на |
|||||||||
стреле длиной 95 м. Ис рия с здания экскаваторов-драглайнов восходит к |
|||||||||
|
|
|
|
нчи |
|
|
|
|
|
Леонардо да В |
|
, а первый образец был изготовлен в США во второй по- |
|||||||
две лыжи |
|
заднююпо ходу перемещения часть опорной базы. Процесс ша- |
|||||||
ловине 19-го века. |
|
|
|
|
|
||||
Рассмотр м шагающ й механизм перемещения с частичным подъёмом |
|||||||||
|
жно |
|
|
|
|
|
|||
верхнего поворотного строения экскаватора (Рис. 4.23) |
|
||||||||
Такие механи мы в процессе шагания опираются на три площадки – |
|||||||||
опускание |
|
|
|
|
|
|
|
||
гания м |
|
|
усл вно разделить на следующие фазы: опускание лыж, подъём |
||||||
метров |
|
|
|
|
|
|
|
|
|
экскаватора, еремещение экскаватора относительно неподвижных лыж и его |
|||||||||
Р |
|
на опорную базу, подъём лыж. После этого цикл повторяется и |
|||||||
экскаватор перемещается на один шаг, длина которого составляет несколько |
|||||||||
, чаще всего 2-3 метра. |
|
||||||||
Основная величина, благодаря которой появились экскаваторы на ша- |
|||||||||
гающих движителях, среднее давление на грунт обычно вычисляется для |
|||||||||
двух положений: при опоре на одну базу (Рис.4.23) |
|
||||||||
|
|
|
|
|
|
pб |
m g |
, |
(4.116) |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
R2 |
|
|
и при опоре на лыжи и частично на базу (Рис.4.24)
|
|
|
|
|
|
|
|
|
|
pл |
Rб , |
|
|
|
|
|
(4.117) |
|
|
|
|
|
|
|
|
|
|
|
|
|
2Fл |
|
|
|
|
|
|
где R – радиус опорной базы; |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Rл – сила давления на лыжи. |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
М |
|
z |
|
|
хВ |
|
|
|
|
|
У |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
αB |
|
|
|
|
|
|
|
|
|
O2 |
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
αl3 |
|
|
|
|
vм |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
xM |
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
l0 |
αl1 |
|
h |
|
|
|
zB |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
zМ |
|
|
|
|
|
|
|
|
|
l3 |
Н |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
αl2 |
|
αВАх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
αl0 |
|
Б x |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
αl0 |
|
αА |
|
zА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
O1 |
|
l1 |
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
ZМС |
|
|
|
|
|
|
и |
|
φА |
|
|
|
|
||||
|
|
|
|
|
|
|
|
р |
|
αl3z |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
xA |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
zС |
|
|
|
|
l |
4 |
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
и |
|
|
|
|
Z |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
xC |
|
|
|
|
Dоб |
|
|
|
п |
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|||
|
|
|
|
|
|
βi |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
К |
|
|
|
|
|
|
ХМС |
|
O |
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
|
ХКС |
|
|
|
|
|
|
|
|
|
|
|
||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 4.23 – Принципиальная схема экскаватора |
|
||||||||||||||
|
|
|
|
с шагающим механизмом перемещения: |
|
|
||||||||||||
|
|
|
|
1 – опорная база; |
2 – механизм шагания; |
|
|
|||||||||||
|
|
|
|
|
|
3 – верхнее поворотное строение |
|
|
|
|||||||||
Для шагающих экскаваторов-драглайнов вопросы устойчивости имеют особо важное значение, так как эти машины часто работают на техногенных опорных основаниях, которые деформируются при сравнительно небольших нагрузках. Кроме того, необходимо учитывать, что нагрузки со стороны рабочего оборудования носят периодический характер при работе экскаватора на одном месте. Поэтому чрезвычайно важно, чтобы центр давления не выходил за пределы ядра сечения. Так как опорная площадь – круг, то радиус
ядра сечения rя |
1 |
R . |
|
|
|
|
|
|
|
У |
||||
4 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
rя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
R |
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 4.24 – Ядро сечен я шагающего экскаватора |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
й |
|
|
||
|
Нагрузки на привод и элементы механ зма шагания являются перемен- |
|||||||||||||
|
|
|
|
|
|
|
|
|
и |
|
|
|
||
ными и за один цикл шагания меняются в значительных пределах. При по- |
||||||||||||||
стоянной скорости вращения п ив дных двигателей мощность, необходимая |
||||||||||||||
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
для работы шагающего механизма передвижения меняется в таких же преде- |
||||||||||||||
лах. |
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Мощность. За рач ваемая на работу механизма шагания можно разде- |
|||||||||||||
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
лить на две главные составляющие – мощность на подъём экскаватора и |
||||||||||||||
мощность на его перемещение. Мощность для подъёма экскаватора можно |
||||||||||||||
|
|
|
и |
|
|
|
|
|
|
|
|
|||
оценить ф рмуле |
|
|
|
|
|
|
|
|
|
|||||
|
|
з |
|
|
|
|
|
|
|
|
|
|||
|
по |
|
|
|
|
|
N1 |
4m g H |
, |
|
|
(4.118) |
||
|
|
|
|
|
|
tц 1000 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m – масса экскаватора без учёта лыж; |
|
|
|
|
||||||||||
Н – высота подъёма центра масс экскаватора; |
|
|||
где |
|
|
|
|
tц – время одного шагания. |
|
|
|
|
Вторая составляющая мощности – это мощность для перемещения экскава- |
||||
Ртора, которая тратится на преодоление трения между базой и несущим осно- |
||||
ванием. Она может быть выражена по формуле (Рис. 4.23) |
|
|||
N2 |
4RA f l |
, |
(4.119) |
|
tц 1000 |
||||
|
|
|
||

где RA |
|
m g lc |
- сила давления базы на несущее основание; |
||
|
|
||||
|
|
lл |
|
||
f – коэффициент трения между базой и несущим основанием; |
|||||
l – перемещение экскаватора на один шаг; |
|||||
RБ |
m g lБ lc |
- сила давления лыж на опорное основание. |
|||
|
lл |
|
|||
|
|
|
|||
|
|
|
|
|
|
|
|
lc |
|
|
|
|
|
У |
||
|
|
|
|
|
|
mg |
|
|
|
|
|
Т |
||||
|
|
|
|
|
|
|
|
|
|
Н |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
RA |
|
|
|
lл |
|
RБ |
|
|
Б |
|
|
|
||
|
Рисунок 4.25 – Определение мощности на перемещение |
|||||||||||||||
|
Третья составляющая затрат |
мощности |
– это мощность на перемеще- |
|||||||||||||
|
|
|
|
|||||||||||||
ние подвижных частей механизма шаган я, которая несравнима по величине |
||||||||||||||||
с двумя основными составляющими. Такйкак мощности N1 |
и N2 реализуются |
|||||||||||||||
поочерёдно, то мощность |
привода |
механ зма шагания выбирается по одной |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
из них. Для механизма шагания, как опорно-ходового устройства, также су- |
||||||||||||||||
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|||
ществуют условия, при не вып лнении которых движение невозможно. Пер- |
||||||||||||||||
вое из этих условий – э , как иранее, условие достаточности мощности |
||||||||||||||||
|
|
и |
|
|
|
|
4m g H |
|
|
|
|
|
|
|||
|
|
з |
|
|
|
|
N1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nд |
|
tц 1000 |
. |
|
|
|
|
(4.120) |
|||
|
|
|
|
|
|
4Rл f l |
|
|
|
|
||||||
|
|
|
|
|
|
|
N 2 |
|
|
|
|
|
|
|
||
|
п |
|
|
|
|
|
tц 1000 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Вт р е усл вие – это условие достаточности сцепления. Для шагающе- |
|||||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
го м ханизмаоперемещения это условие имеет вид |
|
|
|
|||||||||||||
Р |
|
|
|
|
|
|
fб RБ f л Rл , |
|
|
|
|
(4.121) |
||||
fб , fл – соответственно коэффициент трения между опорным основанием |
||||||||||||||||
|
||||||||||||||||
базой и лыжами.

|
4.6 Автономные и специальные механизмы подачи |
|
|
|||||||||
|
Как уже отмечалось, у многих горных машин механизмы подачи сов- |
|||||||||||
мещены с механизмом перемещения. Однако часть горных машин для выем- |
||||||||||||
ки полезного ископаемого имеют специальные механизмы подачи. К таким |
||||||||||||
машинам, прежде всего, относятся карьерные и вскрышные экскаваторы, ко- |
||||||||||||
торые выполняют работу не меняя положения своих опорно-поворотных |
||||||||||||
устройств в пространстве. Автономные механизмы подачи рабочего инстру- |
||||||||||||
мента на забой имеют проходческие комбайны избирательного действия, |
||||||||||||
проходческие щиты и ряд других машин. Некоторые машины имеют специ- |
||||||||||||
альные механизмы подачи рабочего инструмента на забой, например, буро- |
||||||||||||
вые машины, очистные комбайны и агрегаты. Чаще всего подобные меха- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
У |
низмы подачи основаны на использовании гидравлических, канатных, цеп- |
||||||||||||
ных, и зубчато-реечных (кремальерных) устройств. Примером автономного |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Т |
|
механизма подачи является напорный механизм карьерных экскаваторов ти- |
||||||||||||
па прямая напорная лопата. Необходимость такого механизма диктуется ря- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
Н |
|
|
дом причин, среди которых наибольшее значение имеет обеспечение без- |
||||||||||||
опасных значений угла откоса уступа. Наличием механизма напора один из |
||||||||||||
|
|
|
|
|
|
|
|
|
|
Б |
|
|
главных признаков отличия карьерных экскаваторов от строительных, мели- |
||||||||||||
оративных, |
дорожных экскаваторов с небольшим объёмом ковша. Как пра- |
|||||||||||
вило, такими механизмами напора карьерных экскаваторов бывают канатны- |
||||||||||||
ми, гидравлическими, зубчато- |
|
|
й |
|
|
|||||||
еечными. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
р |
|
vт |
|
|
|
|
|
|
|
|
|
|
vn |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
Tт |
|
|
|
|
|
|
|
|
т |
|
|
Тп |
|
|
|
|
|
|
|
|
и |
|
|
β |
|
|
|
|
|
|
|
|
з |
|
γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
Рисунок 4.26 – Механизм напора карьерных экскаваторов |
|||||||||
|
|
|
|
|
типа прямая напорная лопата |
|
|
|||||
|
|
|
|
|
|
|
|
|||||
Независимо от того, каким способом осуществляется подача ковша на забой, соотношение скоростей подъёма ковша и напора должно быть таким, чтобы обеспечивалось безопасное значение угла откоса уступа, т. е. скорости тяги и напора должны обеспечивать выполнение условия

|
|
|
|
vт cos |
vn2 2p l 2p , |
|
|
|
|
|
|
(4.122) |
|||||||
где vт - скорость каната тяги; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
- угол между рукоятью и горизонталью; |
|
|
|
|
||||||||||||||
|
и |
- соответственно угол уступа и угол установки стрелы; |
|
|
|||||||||||||||
|
l p |
- длина рабочей части рукояти (расстояние между осью вращения ру- |
|||||||||||||||||
кояти и соединением тягового каната с ковшом); |
|
Т |
|
||||||||||||||||
|
p |
- угловая скорость поворота рукояти. |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
Н |
|
|
|
|
|
Так как рабочая часть рукояти |
l |
p |
|
|
v |
n |
dt , |
а при постоянной скорости |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
напора |
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|||
|
|
|
|
|
|
|
l p vn t , |
|
|
|
|
|
(4.123) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где t |
- время работы механизма напора при выдвижении рукояти, то соотно- |
||||||||||||||||||
шение (4.122) примет вид |
|
|
|
|
|
|
й |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
||||||
|
|
|
|
v |
т |
cos v |
n |
1 |
|
2 |
t |
2 . |
|
|
|
(4.124) |
|||
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
||
|
|
Это условие можно решить относ тельно скорости напора |
|
|
|||||||||||||||
|
|
|
|
о |
vт cos |
|
. |
|
|
|
(4.125) |
||||||||
|
|
|
|
|
|
|
vр |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
n |
|
|
2p t |
2 |
|
|
|
|
|
|
||
|
|
|
|
з |
|
|
|
1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким обра ом,тдля сохранения постоянных значений толщин снимае- |
|||||||||||||||||
мого ковшом слоя породы необходимо, чтобы скорость подачи рукояти из- |
|||||||||||||||||||
|
|
|
по |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
менялась |
ак ину косинуса. Это легко реализовать при применении гид- |
||||||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
равлических механи мов напора. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Такие механизмы в настоящее время очень широко применяются, а об- |
|||||||||||||||||
чаще |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ласть их ис ользования расширяется. Необходимое усилие подачи (напора) |
|||||||||||||||||||
|
|
вс го считается пропорциональным силе сопротивления резанию |
|
||||||||||||||||
|
|
|
|
|
Pn Kn Pp , |
|
|
|
|
|
|
|
|
|
(4.126) |
||||
где K n |
- коэффициент пропорциональности. |
|
|
|
|
|
|
||||||||||||
Р |
|
Величина этого коэффициента меняется в значительных пределах и за- |
|||||||||||||||||
висит как от свойств разрабатываемой породы, так и состояния резцов и ре- |
|||||||||||||||||||
жимов процесса резания. Величину силы резания можно вычислить по фор- |
|||||||||||||||||||
муле (4. |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Pp e p F , |
|
|
|
|
|
|
|
(4.127) |
||||