

Горные машины и оборудование
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
Рисунок 1.4 – Технолог ческ комплекс машин |
|
||||||||
|
|
|
|
|
на карьере по добыче мела |
|
|
|||||
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1.5 – Проходческий комбайн с соосными роторами в подземной горной выработке месторождения калийных солей
1.ОБЩАЯ СТРУКТУРА
ИОСНОВЫ УСТОЙЧИВОСТИ ГОРНЫХ МАШИН
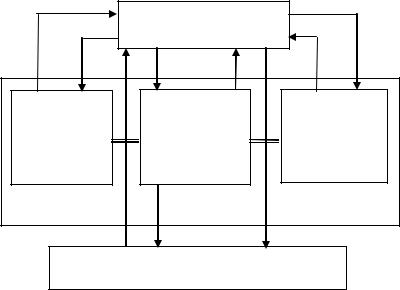
1.1Современная структура горных машин и требования к ним
|
Большое многообразие горных машин затрудняет их отображение ка- |
|||||||||||
кой либо одной общей структурной, функциональной или расчетной схема- |
||||||||||||
ми. Тем не менее, в целях систематизации изложения будем рассматривать |
||||||||||||
горную машину как механическую систему, состоящую из следующих эле- |
||||||||||||
ментов, которые обозначены на рис.1.2. |
|
|
|
|
У |
|||||||
|
|
|
|
|
|
Системы |
|
|
|
|||
|
|
|
|
|
|
|
|
Т |
||||
|
|
|
|
|
управления |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Энергети- |
|
|
|
|
|
|
Н |
|
||
|
|
|
|
Транс- |
|
Исполни- |
|
|
||||
|
|
ческие |
|
|
|
тельные |
|
|
||||
|
|
|
миссия |
|
|
|
||||||
|
|
установки |
|
Б |
|
|
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
конструкцияй |
органы |
|
|
||||
|
|
|
|
Несущая |
|
|
|
|||||
|
|
|
|
|
|
и |
|
|
|
|
||
|
|
|
|
|
Системы |
|
|
|
|
|||
|
|
|
|
перемещения |
и подачи |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
о |
|
|
|
|
|
|
|
||
|
|
Р сунок 1.2 – С руктурная схема горной машины |
|
|||||||||
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
Эта схема ука ывает на сложность горных машин, представляющих со- |
|||||||||||
бой б льшие и слижные по структуре системы. Вместе с тем, |
каждая часть |
|||||||||||
этой схемы также есть большая система и в этом смысле она может быть |
||||||||||||
|
|
з |
|
|
|
|
|
|
|
|
|
|
изучена сам ст ятельно. Исполнительные органы и другие части машины |
||||||||||||
так или иначе взаимодействуют с горной породой, свойства которой в значи- |
||||||||||||
|
о |
|
|
|
|
|
|
|
|
|
|
|
т льной сте ени определяют конструкцию и режимные параметры горных |
||||||||||||
машин. |
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
Современные технологии горного производства, объёмы горных работ |
|||||||||||
еи условия их выполнения, а также уровень развития техники, позволяют |
||||||||||||
сформулировать к таким машинам ряд требований, которые можно разделить |
||||||||||||
на общетехнические и специальные. Общие требования включают в себя |
||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
технические, экономические, социальные и экологические. Технические тре- |
||||||||||||
бования обычно вносятся в документацию, сопровождающую машину весь |
||||||||||||
её жизненный цикл, и отражают её технический уровень, надёжность и усло- |
||||||||||||
вия эксплуатации. Экономические требования объединяют сведения о цене, |
||||||||||||
уровне затрат при эксплуатации, ремонте и утилизации машины. Социальные |
||||||||||||
требования включают санитарно-гигиенические условия работы персонала, его безопасность, комфортность труда, лёгкость и удобство управления. Экологические требования выражаются мероприятиями, обеспечивающими защиту окружающей среды от вредных воздействий, возникающих при работе
машин. В последнее время, в связи с общим повышением требований к гор- |
||||||||||||||
ным машинам, в зависимости от конкретных условий эксплуатации предъяв- |
||||||||||||||
ляются ряд специальных требований, ужесточающих их производство и экс- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
плуатацию - взрыво- и пожаробезопасность, проходимость, маневренность, |
||||||||||||||
габаритные размеры, обеспечивающие перемещения в ограниченном про- |
||||||||||||||
странстве горных выработок. |
|
|
|
|
|
Т |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
1.2 Основные свойства горных пород и их исчисление |
|
|
||||||||||||
Среди комплекса физических свойств горных пород наибольшее влия- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
ние на условия работы горных машин оказывают их механические характе- |
||||||||||||||
ристики. Эти характеристики обычно делят на группы размерно- |
||||||||||||||
плотностных, прочностных, упруго-пластичных, реологических |
и других |
|||||||||||||
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
свойств. Среди размерно-плотностных сво ств наибольшее значение имеют |
||||||||||||||
плотность и фракционный состав |
природной |
или измельченной |
тем или |
|||||||||||
иным способом породы. Плотность горных пород изменяется в довольно |
||||||||||||||
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
значительных пределах и зависит от ф з ческого состояния породы (содер- |
||||||||||||||
жания влаги, пористости, |
ф акционного состава и др.) Фракционный состав |
|||||||||||||
|
|
|
|
|
рно |
|
|
|
|
|
|
|
||
горных пород в естественном состоянии, а также подвергнутых разрушению |
||||||||||||||
горнодобывающими и г |
|
-пе е абаты-вающими машинами, оценивается с |
||||||||||||
|
|
|
|
т |
|
|
|
|
|
|
|
|
||
помощью относительных вых д в частиц породы определённых размеров. |
||||||||||||||
Эти выходы определяю ся п средством применения различных законов рас- |
||||||||||||||
|
|
|
прочности |
|
|
|
|
|
|
|
|
|
||
пределения част ц по х размерам. |
|
|
|
|
|
|
|
|||||||
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
Среди прочностных свойств горных пород наиболее часто используют- |
||||||||||||||
ся их пределы |
|
|
|
при сжатии, изгибе и сдвиге. Наиболее общей ха- |
||||||||||
|
о |
|
|
|
|
|
|
|
|
|
|
|
||
рактеристикой прочностных свойств считается коэффициент крепости и |
||||||||||||||
шкала |
чн сти М. М. Протодьяконова. Эта шкала построена на определе- |
|||||||||||||
м пр |
|
|
|
|
|
f |
сж , |
|
|
|
|
(1) |
||
нии к эффициента крепости путем деления временного сопротивления сжа- |
||||||||||||||
тию |
р ды на 10, то есть коэффициент крепости определяется соотношени- |
|||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где сопротивление сжатию σсж определяется в МПа.
От коэффициента крепости горных пород зависят затраты на разрушение массива породы в залежи, особенно механическим способом разрушения. Шкала проф. Протодьяконова до настоящего времени является основой оценки прочностных характеристик большинства горных пород. Она приводится в таблице 1.1.

Таблица 1.1 – Категории горных пород в зависимости от коэффициента крепости
Категория |
|
Степень крепости |
|
Примеры пород |
|
Коэффициент |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
крепости |
|
1 |
Породы высшей крепости |
|
Базальты, |
|
|
|
|
20 и более |
|
||||
|
|
|
|
|
|
кварциты |
|
|
|
|
|
|
|
2 |
Очень крепкие |
|
|
|
Крепкие граниты |
|
|
15 |
|
||||
3 |
Крепкие породы |
|
|
|
Граниты, |
|
мрамор, |
|
|
10 - 8 |
|
||
|
|
|
|
|
|
очень крепкие |
|
|
|
У |
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
известняки |
|
|
|
|
|
||
4 |
Достаточно крепкие |
|
Обыкновенные |
песча- |
|
|
6 – 5 |
|
|||||
|
|
|
|
|
|
ники, железные руды, |
|
|
|
|
|||
|
|
|
|
|
|
сланцы |
|
|
|
|
|
|
|
5 |
Породы средней крепости |
|
Глинистые |
|
|
|
|
5 - 4 |
|
||||
|
|
|
|
|
|
сланцы, мергель, |
|
|
|
|
|||
|
|
|
|
|
|
|
Б |
|
Т4 – 3 |
|
|||
6 |
Довольно мягкие породы |
|
Мягкие сланцы, |
|
|
||||||||
|
|
|
|
|
|
мел, крепкие угли, |
|
|
|
|
|||
|
|
|
|
|
|
калийные соли, |
|
|
|
|
|
||
|
|
|
|
|
|
каменистый грунтН |
|
|
|||||
|
|
|
|
|
|
гравий |
|
|
|
|
|
|
|
7 |
Мягкие породы |
|
|
|
Глина, мягкий уголь, |
|
|
1 – 0,8 |
|
||||
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
8 |
Землистые породы |
|
|
Растительный |
грунт, |
|
|
0,6 |
|
||||
|
|
|
|
|
|
торф, су линок |
|
|
|
|
|
||
9 |
Сыпучие породы |
р |
Песок, |
|
|
|
|
|
0,5 |
|
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
о |
|
мягк й |
|
|
гравий, |
|
|
|
|
|
|
|
|
|
насыпной грунт |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
10 |
Плывущие пор ды |
|
|
Плывуны, |
сапропель в |
|
|
0,3 |
|
||||
|
|
|
|
|
|
водоемах, другие |
|
|
|
|
|||
|
|
|
|
|
|
разжиженные породы |
|
|
|
|
|||
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
Вместе с коэфф ц ен ом крепости проф. Протодьяконова для опреде- |
|||||||||||||
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
ления прочностных свойствгорных пород используют пределы прочности |
|||||||||||||
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
при сжатии, растяжен |
|
згибе. Упругие свойства горных пород чаще все- |
|||||||||||
го характери уются модулем Юнга и коэффициентом Пуассона. Хотя в клас- |
|||||||||||||
сическ м для материаловедения виде эти характеристики определяются за- |
||||||
труднительно, тем не менее, в исследованиях и расчетах горных машин они |
||||||
е |
|
|
|
|
|
|
ис ользуются очень часто и понимаются как величины, дающиеся классиче- |
||||||
скими о ределениями |
|
|
|
|
|
|
Р |
п |
E ; |
|
|
, |
(1.2) |
|
|
|
||||
|
|
|
|
|
|
|
где E - модуль Юнга (модуль упругости), Па;
σ - напряжение растяжения (сжатия) образца породы, Па; ε = dl/l - относительная продольная деформация;
l - длина испытуемого образца, м; dl - удлинение образца, м;
dl  l - относительная поперечная деформация;
l - относительная поперечная деформация;
l и dl - поперечный размер образца и его изменение, м;
μ - коэффициент Пуассона.
Помимо модуля упругости часто используется такая характеристика горных пород, как модуль G сдвига, который определяется выражением
|
|
|
|
|
|
|
G , |
|
|
|
|
|
(1.3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
- касательное напряжение при сдвиге; |
|
|
|
|
|
|
|||||||
|
- угол сдвига. |
|
|
|
|
|
|
|
|
|
|
|
||
Модули E деформации и сдвига при соблюдении закона Гука связаны соот- |
||||||||||||||
ношением |
|
|
|
|
|
|
|
|
|
|
|
У |
||
|
|
|
|
|
|
|
|
E |
|
|
|
|
||
|
|
|
|
|
|
|
G |
|
. |
|
Т |
(1.4) |
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
2 1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Кроме перечисленных характеристик физических свойств горных по- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
род используются и ряд других характеристик, отражающих взаимодействие |
||||||||||||||
горных машин с породами. |
Среди них наиболее часто встречаются: |
твер- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
дость, контактная прочность, угол естественного откоса, разрыхленность, |
||||||||||||||
пористость, трещиноватость, абраз |
вность, вязкость и некоторые другие. |
|||||||||||||
|
Для оценки взаимодействия |
|
х элементов механических органов |
|||||||||||
|
|
|
|
|
|
|
й |
|
|
|
|
|||
разрушения с породой используются х так е характеристики, как сопротив- |
||||||||||||||
ляемость резанию и удельное соп отивление |
|
резанию. Большинство пере- |
||||||||||||
численных свойств пор |
|
п еделяются опытным путем с использованием |
||||||||||||
специальных приборов и ехнических устройств. Особое значение среди этих |
||||||||||||||
|
|
|
|
|
|
режущ |
|
|
|
|
|
|
|
|
характеристик |
с пр |
ивляем сть и удельное сопротивление разруше- |
||||||||||||
нию или резан ю, о чем |
подробнее |
будет изложено в разделе 2. |
|
|
||||||||||
|
|
|
т |
|
|
|
|
|
|
|
|
|
||
|
1.3 Пространственная ориентация горной машины |
|
|
|
||||||||||
|
Б |
|
имеют |
|
|
|
|
|
|
|
|
|
|
|
|
|
горных машин выполняя операции по выемке, транспор- |
||||||||||||
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
тированию и переработке полезных ископаемых тем или иным образом пе- |
||||||||||||||
ремещаются в пр странстве. Эти перемещения могут быть как непрерывны- |
||
|
|
льшинство |
ми, так и ериодическими. В любом случае для определения движения ма- |
||
шин в целом и отдельных ее механизмов и частей необходимо выбрать си- |
||
|
п |
|
ст мы координат, в которых это движение определяется. |
||
|
Неподвижная система координат обычно связывается с географиче- |
|
е |
|
|
ским положением месторождения полезного ископаемого. Подвижная систе- |
||
ма координат передвигается вместе с машиной и ее полюс совмещается с ка- |
||
Р |
|
|
кой-либо характерной точкой машины (центр масс, центр опорной площади и |
||
т. д.). Положение подвижной системы координат относительно неподвижной |
||
обычно задается декартовыми координатами её полюса и тремя углами Эйлера, с помощью которых определяется сферическое движение подвижной системы.
При использовании углов Эйлера положение подвижной системы
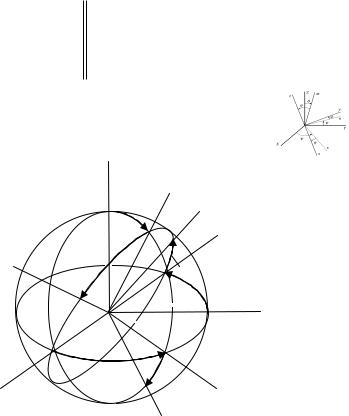
обычно определяют таблицей косинусов между осями подвижной и неподвижной систем декартовых координат. Углы Эйлера введем подобно корабельным и самолетным осям [1] таким образом (рис.1.2), что перевод неподвижной системы OXYZ в положение подвижной системы осуществляется тремя последовательными поворотами: на угол вокруг оси OZ , на угол
вокруг оси On , с которой совпадает ось Oy после первого поворота, и на
угол вокруг оси Ox , с которой совпадает ось OX |
после двух предыдущих |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
поворотов. Заметим, что после первого поворота ось |
OX займет положение |
|||||||||||||||||
Oк , ось OZ после второго поворота совпадает с Om |
и после третьего с Oz , |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
ось OY переходит в промежуточное положение On после первого поворота |
||||||||||||||||||
и в положение Oy после третьего. Углы , , |
называются соответственно |
|||||||||||||||||
углами рысканья, поперечного и продольного крена. |
|
|
|
|||||||||||||||
|
|
Таблицу косинусов между подвижными и неподвижными осями вы- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|||
|
числим как произведение трех матриц направляющих косинусов, образу- |
|||||||||||||||||
|
ющихся после каждого из перечисленных поворотов. Обозначив эти мат- |
|||||||||||||||||
|
рицы, соответственно через a , |
a и a , имеем |
|
Н |
|
|||||||||||||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
X |
Y |
|
Z |
|
|
|
|
|||
|
|
|
|
|
|
|
cos |
sin |
0 |
|
к |
|
|
|
||||
|
|
|
|
|
|
|
р |
йcos 0 |
|
n . |
|
|
(1.3) |
|||||
|
|
|
|
|
|
a |
sin |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
0 |
|
0 |
|
1 |
Z |
|
|
|
|||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
θ |
m |
|
|
|
|
|
|
|
|||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
φ |
|
п |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
z |
|
φ |
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
|
|
|
|
|
|
ψ |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
ψ |
θ |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
X |
|
|
|
x |
к |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Рис. 1.3 - Ориентация подвижных осей |
|
|
||||||||||||
|
Элементы этой матрицы (рис. 1.3) равны косинусам углов между соот- |
|||||||||||||||||
ветствующими осями (например, cos X ,к cos , |
cos Z ,к 0 ). |
|||||||||||||||||

Аналогично
к |
n |
Z |
cos |
0 |
sin x |
a 0 |
1 |
0 |
n ; |
(1.4) |
|
|
|
|
|
sin |
0 |
cos |
m |
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
n |
m |
|
|
|
|
|
|
У |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
0 |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
0 |
|
cos |
sin |
y . |
|
|
|
Т |
(1.5) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
sin |
cos |
z |
Н |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Тогда матрица направляющих косинусов определится как произведе- |
||||||||||||||||||||||
ние трех приведенных матриц [1] |
|
|
|
|
Б |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
A a a a . |
|
|
|
|
|
|
|
(1.6) |
||||||
|
|
Произведя умножение, найдем |
|
й |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
X |
|
|
|
р |
|
|
Y |
|
|
|
|
|
|
Z |
|
||||||
|
|
cos cos |
|
|
|
cos sin |
|
|
|
sin |
x |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
A |
cos sin sin cos sin |
|
|
sin sin sin cos cos |
sin cos |
y (1.7) |
|||||||||||||||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
cos sin cos sin sin |
|
cosиsin sin sin cos |
cos cos |
z |
||||||||||||||||||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Машина в неко орых случаях рассматривается в состоянии покоя, по- |
||||||||||||||||||||||
этому const , |
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
const , const . Приняв для упрощения 0 , прихо- |
||||||||||||||||||||||||
дим к следующему в ду аблицы направляющих косинусов: |
|
|
|
|||||||||||||||||||||
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
X |
|
|
|
|
|
Y |
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
cos |
|
|
|
|
0 |
|
|
sin |
|
x |
|
|
|
|
||||
|
|
|
A |
sin sin |
|
cos |
sin cos |
|
y |
. |
|
|
(1.8) |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
cos sin |
sin |
cos cos |
z |
|
|
|
|
||||||||||||
Р |
пНаконец, машина может находиться в положении, когда имеет место |
|||||||||||||||||||||||
|
||||||||||||||||||||||||
только продольный крен, т.е. угол - поперечного крена равен нулю. В этом |
||||||||||||||||||||||||
случаематрица направляющих косинусов имеет еще более простой вид |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
X |
|
Y |
|
Z |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
|
0 |
|
x |
|
|
|
|
|
|
||
|
|
|
|
|
|
A |
0 |
|
cos |
sin |
y . |
|
|
|
|
|
(1.9) |
|||||||
|
|
|
|
|
|
|
|
|
0 |
|
sin |
cos |
z |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зная направление действия сил в одной из систем, можно при помощи

(1.8) и (1.9) найти проекции сил на оси другой системы.
Возможны и другие варианты таблицы направляющих косинусов, которые соответствуют различным ситуациям, возникающим в практике функционирования горных машин.
1.4 Положение центров масс и давления машин на опорное основание
|
При определении координат центра масс в инженерных расчётах гор- |
||||||||||||||||||||||||||
ная машина рассматривается как механическая система, состоящая из мате- |
|||||||||||||||||||||||||||
риальных частей, координаты центров масс которых известны. Как и для |
|||||||||||||||||||||||||||
большинства технологических машин, совершающих какие-либо перемеще- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
ния в пространстве, для большинства горных машин важнейшей характери- |
|||||||||||||||||||||||||||
стикой оценки их устойчивости является положение центра масс. |
Радиус- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
вектор центра масс в какой-либо системе координат, связанной с машиной, |
|||||||||||||||||||||||||||
определяется в общем виде интегралом |
|
|
|
|
|
|
Н |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
rc |
|
|
1 |
r dV , |
Б |
|
|
(1.10) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m V |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где интегрирование производится по общему объёму V машины; |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
||
|
- плотность материала маш ны, в общем случае зависящая от x, y, z; |
||||||||||||||||||||||||||
|
r |
x2 y 2 |
z 2 |
- радиус мате |
иальнойточки с плотностью ; |
|
|
||||||||||||||||||||
|
m - общая масса машины. |
р |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Тогда координа ы цен ра масс машины |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
n |
|
|
|
о |
|
n |
|
|
|
|
|
|
n |
|
|
|
|||||
|
|
|
|
|
|
mi |
xi |
mi |
yi |
|
|
|
mi zi |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
x |
c |
|
1 |
|
|
; |
|
|
y |
c |
|
1 |
|
|
; |
z |
c |
|
1 |
, |
|
(1.11) |
|||
|
|
|
|
|
n |
т |
|
|
|
|
n |
|
|
|
|
|
n |
|
|
|
|||||||
|
|
|
|
|
|
mi |
|
|
|
|
|
|
mi |
|
|
|
|
|
mi |
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где mi |
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
- масса |
тдельной материальной части; |
|
|
|
|
|
|
|
|||||||||||||||||||
|
xi, |
yi, zi |
|
- |
|
рдинаты ее центра масс в подвижной системе отсчета; |
|||||||||||||||||||||
|
n - |
количество |
материальных частей. |
|
|
|
|
|
|
|
|||||||||||||||||
|
При работе или простом перемещении горной машины на нее кроме |
||||||||||||||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сил тяж сти действуют силы взаимодействия исполнительных органов с по- |
|||||||||||||||||||||||||||
родой и другие внешние нагрузки. Эти нагрузки тем или иным способом че- |
|||||||||||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
(ходовое устройство) передаются на опорное ос- |
|||||||||||||||||
рез механизм перемещения |
|||||||||||||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нование. Взаимодействие ходового устройства с опорным основанием характеризуется рядом параметров, среди которых одним из важнейших является давление ходового устройства на опорное основание.
Различают несколько характеристик распределения давления по опорному основанию: среднее, максимальное и минимальное давление, положение центра давления и ядра сечения. Определим эти характеристики.
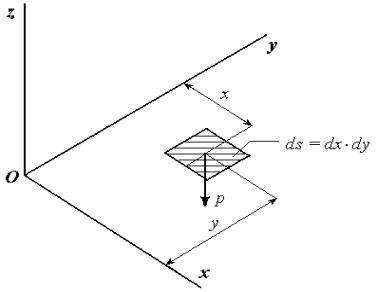
Центром давления машины на грунт называется точка, радиус-вектор
которой определяется выражением
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p ds |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
, |
|
|
|
|
|
|
|
|
(1.12) |
||||
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
p ds |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
p - давление машины на грунт в точке с радиус-вектором |
|
; |
|
|||||||||||||||||||||||||||
r |
|
||||||||||||||||||||||||||||||
|
|
S - площадь опорной поверхности машины; |
|
|
|
|
|
У |
|||||||||||||||||||||||
|
|
ds - элемент этой площади. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Иначе, центр давления представляет собой точку приложения равно- |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
||
действующей сил давления машины на несущее основание. Из последнего |
|||||||||||||||||||||||||||||||
определения следует, что эта точка лежит в опорной плоскости ходового |
|||||||||||||||||||||||||||||||
устройства. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Записав (1.12) в проекциях на оси подвижной системы координат, по- |
|||||||||||||||||||||||||||||
лучим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
x p ds |
|
|
|
|
y |
p ds |
|
|
|
|
||||||||||||
|
|
|
|
|
x |
|
|
S |
|
|
|
|
|
; |
y |
|
|
S |
|
|
|
|
Н. |
(1.13) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
p |
ds |
|
|
|
|
p ds |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
и |
|
|
S |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Интегралы в числителе выражен (1.13) представляют собой (рис. 1.4) |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
суммарные моменты сил давления маш йны на грунт относительно осей Ox |
|||||||||||||||||||||||||||||||
и Oy , т. е. |
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
p x |
ds M y |
; |
|
p y ds M x . |
|
|
|
|
||||||||||||||||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
С другой стороны |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
з |
|
|
|
|
M x |
M x F ; |
M y M y F , |
|
|
|
|
|
|
||||||||||||||
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
F |
- равн действующая внешних сил, действующих на машину (исклю- |
|||||||||||||||||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
чая силы реакций грунта на ходовое устройство). |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
Для г рных машин равнодействующая F |
внешних сил представляет |
||||||||||||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
г ом трическую сумму силы тяжести, приложенной в центре масс, сил реак- |
|||||||||||||||||||||||||||||||
ций разрабатываемой породы на рабочие органы, крюкового усилия и т. п. |
|||||||||||||||||||||||||||||||
Р |
|
Тогда на основании теоремы о моменте равнодействующей имеем |
|
||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||
M x F M x mg M x P ;
(1.14)
M y F M y mg M y P .
где mg - сила тяжести;
m – масса машины;
P - равнодействующая внешних сил (за исключением сил тяжести и нормальных реакций опорной поверхности).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
Б |
Т |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Рис. 1.4 - К определению моментов |
MНи M |
||||||||||
давления машины на несущее основан евыражений |
x |
y |
||||||||||||||
|
|
|
|
|
|
|
|
|
иS |
|
|
|
|
|
||
|
Интеграл, стоящий в знаменателе |
|
|
|
|
(1.13), |
есть общая сила |
|||||||||
|
|
|
|
|
|
о |
pds Fz , |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где Fz |
|
|
|
|
т |
рвующей |
F на ось |
|
Oz , которая направлена |
|||||||
|
- проекция равн дейс |
|
||||||||||||||
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
нормально к опорной п верхн сти. Эта равнодействующая, есть сумма про- |
||||||||||||||||
екций силы тяжести |
равнодействующей внешних сил на ось Oz |
|||||||||||||||
|
|
z |
|
зz |
|
|
mg z Pz , |
|
|
|
||||||
|
|
|
учетом |
|
Fz |
|
|
(1.15) |
||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где mg |
|
и P |
- с тветственно проекции силы тяжести и равнодействующей |
|||||||||||||
внешних сил на ту же ось. |
|
|
|
|
|
|
|
|
|
|
||||||
Р |
С |
|
|
этого, окончательно |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
x |
M y |
; |
y |
M x |
|
, |
|
(1.16) |
|||
|
|
|
|
|
Fz |
Fz |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где M x и M y |
определяются выражениями (1.14), а Fz - выражением (1.15). |
|||||||||||||||
|
Направление действия силы Р зависит от способа соединения рабочего |
|||||||||||||||
органа с машиной. |
Если рабочий орган закреплен на машине жестко, то |
|||||||||||||||
направление силы Р меняется вместе с изменением положения машины, вызываемым неровностью рельефа поверхности или различной деформацией опорного основания. В этом случае направление силы Р зафиксировано в