

Горные машины и оборудование
.pdfгде e p |
- удельное сопротивление резанию (удельное сопротивление копа- |
|||||||||
нию). |
|
|
|
|
|
|
|
|
|
|
|
Примером организации подачи исполнительного органа являются про- |
|||||||||
ходческие комбайны и комплексы с периодической подачей исполнительных |
||||||||||
органов на забой (Рис. 4.27) |
|
|
|
|
||||||
|
|
|
|
|
|
vn |
|
|
|
У |
|
|
|
|
|
|
|
|
vn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
p |
|
|
Т |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
Рисунок 4.27 – Применение г дравл ческих механизмов подачи: |
||||||||
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
а) – комбайн изб |
ательного действия; |
|
|
|||
|
|
|
|
|
|
б) – |
иф онтального типа |
|
|
|
|
В комбайнах избира ельнрго действия, как правило, исполнительный |
|||||||||
орган имеет три, |
а иногда и че ыре, |
степени свободы, что позволяет при не- |
||||||||
подвижном комбайне |
комбайн |
|
|
|
|
|||||
раба ывать всю поверхность забоя за счёт независи- |
||||||||||
мых перемещен й |
тв вертикальной и горизонтальной плоскостях. Эти |
|||||||||
перемещения могут реал зовываться гидромашинами вращательного и по- |
||||||||||
ступательн |
действия. В некоторых проходческих машинах, |
отрабатыва- |
||||||||
|
|
|
|
рукояти |
|
|
|
|
||
ющих |
дн временно всю поверхность забоя подача органа разрушения осу- |
|||||||||
|
|
|
з |
|
|
|
|
|
|
|
ществляется гидр цилиндрами, закреплёнными на неподвижном в этот пери- |
||||||||||
од кор усе машины. |
|
|
|
|
|
|
||||
|
|
го |
|
|
|
|
|
|
|
|
|
Канатные, цепные и зубчато-реечные механизмы подачи часто исполь- |
|||||||||
зуются в тех случаях, когда непрерывное перемещение органа разрушения |
||||||||||
|
п |
|
|
|
|
|
|
|
|
|
явля тся весьма значительным, например, при подземных разработках полез- |
||||||||||
еных ископаемых длинными столбами с непрерывной подачей выемочных |
||||||||||
машин на всю длину вынимаемого столба породы (Рис. 4.28). |
|
|||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
vn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|

б)
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
таких |
|
|
|
|
|
|
Рисунок 4.28 – Одношнековый очистной комбайн |
|
|||||
|
Канатные и цепные системы подачи оч стных машин являются выне- |
|||||||
сенными, так как тяговые механизмы |
систем находятся вне комбайнов. |
|||||||
В настоящее время большинство |
чистных комбайнов производится с так |
|||||||
|
|
|
т |
|
|
|
|
|
называемыми бесцепными сис ремами подачи. В таких системах необходимое |
||||||||
|
|
ли |
|
|
|
|
|
|
усилие подачи исполни ельн го |
ргана на забой развивается за счёт упора |
|||||||
цевочного или зубча ого колеса, установленных на комбайне и приводимыхв |
||||||||
|
|
з |
|
|
|
|
|
|
движение от источн ка энергии, |
также установленного |
на выемочной ма- |
||||||
шине, на цевочную |
зубчатую рейку, которые устанавливаются на ставе |
|||||||
|
Это |
|
|
|
|
|
|
|
забойн го к нвейера. |
|
|
|
|
|
|
||
|
В нек т рых выемочных машинах подача органов выемки породы мо- |
|||||||
|
п |
|
|
|
|
|
|
|
жет существляться |
за счёт сил тяжести, например, |
ковш экскаватора- |
||||||
е |
|
|
|
|
|
|
|
|
драглайна. |
в зможно при разработке сравнительно непрочных горных |
|||||||
пород, или |
ри их предварительном разрыхлении. |
|
|
|||||
Р |
|
|
|
|
|
|
|
|
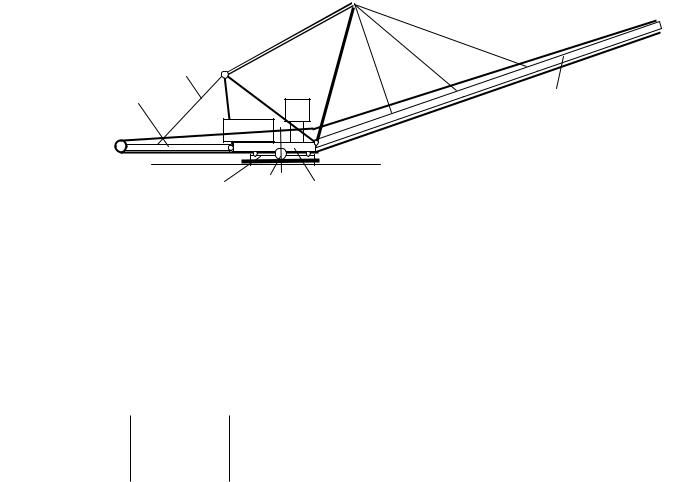
5.1 Моделирование отвалообразователя
Для моделирования отвалообразователя принимаем следующие допущения.
1. Отвалообразователь – динамическая система, состоящая из совокупности следующих элементов:
- база 1 (абсолютно жесткое тело); - поворотная платформа 2 (абсолютно жесткое тело);
- отвальная консоль 3 (деформируемая сложная механическая система); приемная консоль 4 (часть платформы); - канаты, ванты 5 ,6 и 7 (элементы, связывающие между собой основ-
2. деформации всех элементов, включая опорноеБНоснование, в пределах закона Гука, т. е. пропорциональны напряжениям.
ные части); |
У |
|
|
- конвейер 8 (ленточный транспортер, установленный на приемной и |
|
отвальной консолях, а также на поворотной платформе); |
|
|
Т |
- механизм шагания 9. |
|
3. платформа относительно базы поворачиваетсяй вокруг оси цапфы.  и
и




|
|
|
|
5 |
|
|
|
р |
|
|
|
4 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
1 |
9 |
|
2 |
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
Рисунок 5.1 – Схема отвалообразователя |
|
||||
Положение базыв пространстве определяем посредством углов Эйлера , |
|||||||||
, |
. В стаци нарном режиме считаем, что все углы малы, т. е. база совер- |
||||||||
|
|
о |
|
|
|
|
|
||
ша т малые колебания относительно положения равновесия под действием |
|||||||||
случайных нагрузок, основная из которых – ветер. Тогда таблица направля- |
|||||||||
|
п |
|
|
|
|
|
|
|
|
ющих косинусов между главными осями инерции и осями неподвижной си- |
|||||||||
|
: |
|
|
|
|
|
|
|
|
стемы |
|
|
|
|
|
|
|
|
|
Р |
|
|
X |
Y |
Z |
|
|
|
|
|
1 |
|
|
x |
|
|
|
||
А≈ |
|
1 |
|
y - таблица направляющих косинусов при малых от- |
|||||
|
|
||||||||
|
|
|
|
1 |
z |
|
|
|
|
клонениях базы из натурального положения. Таблица – частный случай вращения твердого тела при sin .
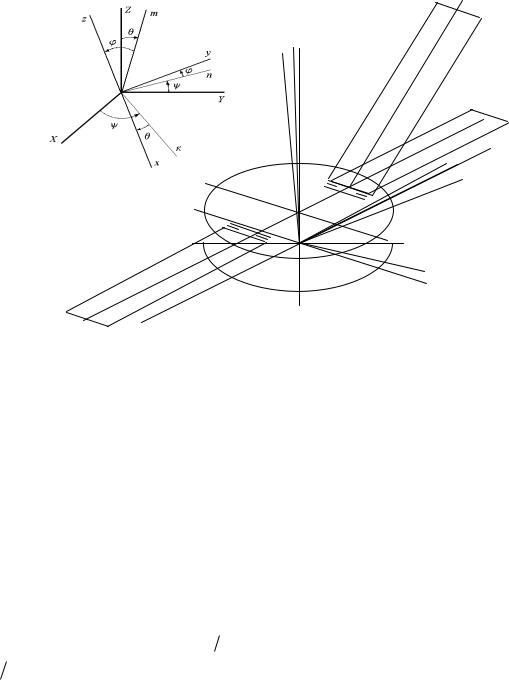
Возьмем углы , , за обобщенные координаты. Тогда , , - обобщенные координаты.
Квазискорости – проекции угловых скоростей на оси Ox, Oy, Oz.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
платформа |
|
|
|
|
|
|
|
|
|
|
|
|
|
Б X |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
база |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
x |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
Рисунок 5.1 – Прост анственное положение опорной базы |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
расчет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Если вокруг оси Oz пов р |
|
|
|
|
в нет, то квазискорости определяются выраже- |
|||||||||||||||||||||||||||||||||
ниями |
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
наклона опорной базы |
|
|
|
|
|||||||||||||||||||
|
5.2 Стат ческ й |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
а) площадка, на которой стоит машина – горизонтальная |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
п |
|
|
|
|
|
pmax |
|
|
N |
|
4N rд |
, |
|
|
pmin |
N |
|
4N rд |
|
|
|
||||||||||||||||
ет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
F R |
|
|
|
|
|
|
|
|
F F R |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
сли pmin 0 , то rд rд rд max |
|
R 4 - радиус ядра сечения базы. |
|
|||||||||||||||||||||||||||||||||||
Р |
M y |
N , Му |
– момент внешних сил относительно оси Оу. Ось Ох совпада- |
|||||||||||||||||||||||||||||||||||
rд |
||||||||||||||||||||||||||||||||||||||
|
с линией наибольшего наклона. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
h0 – средняя деформация. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
h |
|
1 2 |
N |
|
или |
h |
|
|
p |
|
|
|
1 |
2 |
R ; |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
0 |
|
|
2E |
R |
|
|
|
0 |
|
|
|
|
|
2E |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
P Kh h ; |
|
|
Kh |
|
|
|
|
2E |
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
R 1 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||

|
h h0 r cos tg , |
|
|
|
|
где θ – угол крена базы. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
tg |
hmax |
hmin |
; |
|
|
|
|
|
h |
|
|
hmax |
hmin |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
4r |
|
|
p |
|
|
|
|
|
4r |
|
|
|
p |
|
4r |
|
У |
|||||||||||||||||||||||||||||||||
|
h |
|
|
|
|
|
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
д |
|
|
|
|
0 |
1 |
|
|
|
д |
|
|
|
0 |
1 |
|
|
|
|
д |
; |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
max |
|
|
|
|
Kh |
|
|
|
|
|
|
Kh F |
|
|
|
|
|
|
R |
|
Kh |
|
|
|
|
|
|
R |
|
|
|
Kh |
|
|
|
R |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
p |
min |
|
|
|
|
|
|
p |
0 |
|
|
|
|
|
|
|
4r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
д |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
min |
|
|
|
|
|
Kh |
|
|
|
|
Kh |
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
tg |
|
|
|
|
p0 |
|
|
1 |
|
|
4rд |
1 |
4rд |
|
|
|
p0 |
|
|
|
|
|
8rд |
|
|
|
4 p0 rд |
|
; |
|
|
|
|
|
Т |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
2R Kh R |
|
|
R |
Kh |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2R Kh |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
Подставляем Kh и получаем |
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 p0 rд 1 |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
и |
|
|
|
|
Б2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
tg |
|
|
2 1 |
|
|
|
p0 |
rд |
|
2 1 |
|
|
|
N rд . |
|
(5.1) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
E |
|
|
|
|
R3 |
|
|
|||||||||||||||
|
Проверим этот результат, выч сл в Му от давления |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2 R |
p dF r |
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
M |
y |
|
|
|
|
|
|
, где rд |
|
– плечо относительно оси Оу. |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
rд r cos . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Считая, как и ранее, что давление пропорционально деформациям |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
P |
|
|
Kh |
h , |
|
где |
|
|
|
h h0 |
|
ry tg , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r cos tg p0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
Р |
им ем p Kh h0 |
|
|
Kh r cos tg . |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 R |
p0 Kh r cos tg r d dr r cos |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Тогда M y |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
p0 |
r 2 |
cos d dr |
|
Kh r 3 |
cos 2 tg dr d |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
p0 R |
|
|
|
sin |
|
|
R |
|
|
tg Kh |
|
|
cos |
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
3 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||

|
1 |
R4tg Kh |
1 |
R4 |
|
2E |
|
|
|
|
tg R3 |
E |
|
|
tg ; |
(5.2) |
|||||
|
4 |
|
R 1 2 |
|
|
||||||||||||||||
4 |
|
|
|
|
|
|
|
2 1 2 |
|
|
|||||||||||
|
|
|
2M y 1 2 |
|
|
2N r 1 2 |
|
|
|
|
|
|
|
|
|
|
|||||
tg |
|
|
|
|
|
|
|
д |
|
|
, см.стр.6, то же самое, |
M д max N rд . |
|||||||||
E R3 |
|
|
|
E R3 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Если считать угол θ малым и принять |
tg , то записав |
M y C можно |
|||||||||||||||||||
определить коэффициент угловой жесткости опорного основания под базой
Cд |
E R3 |
|
|
У(5.3) |
2 1 2 . |
|
Н |
||
|
|
|
|
|
|
|
Б |
|
|
5.3 Деформация опорного основания под опорной базойТ |
||||
1. Ядро сечения базы в форме кольца |
|
|
|
|
|
й |
|
|
|
Для нахождения радиуса ядра сечения, которое в силу симметрии имеет |
||||
форму круга, используем для нахождения напряжений в плоскости контакта базы с опорным основанием формулы [1, 2], определяющие значения напряжений при сложном изгибе (внецентровом сжатии).
|
P |
|
|
M |
x |
|
M y |
|
|
|
p |
z |
|
|
|
|
|
, |
(5.4) |
||
|
|
|
|
|
|
|||||
|
F |
|
иW W |
|
|
|||||
|
|
|
|
|
x |
|
y |
|
|
|
р |
|
|
|
|
||||||
где Рz - нормальная нагрузка на |
п рное основание; |
|
||||||||
о Mx и My - моментыивнешнихтнагрузок относительно соответствующих осей;
F - площадь опорной базы;
Wx и Wy - моменты сопротивления опорной площади относительно тех же
1.Волкпов, Д.П., Черкасов В.А. Динамика и прочность многоковшовых экс- екаваторов и отвалообразователей. М.: Машиностроение. 1969. - 408 с.
2.Пад рни, Р.Ю. Горные машины. М.: Недра. 1980. – 390 с.
Р3. Казаченко, Г.В. Определение пространственной ориентации горных машин // Горная механика. 2007. № 4. – С. 85-89.
4.Опейко, Ф.А. Торфяные машины // Ф.А. Опейко. – Минск: Выш. школа,
1968. -408 с.
5.Рудицын, М.Н. Справочное пособие по сопротивлению материалов / М.Н. Рудицын, П.Я. Артемов, М.И. Любошиц. – Минск: Вышэйшая школа, 1970. -з
638 с.
6.МАШИНЫ ДЛЯ ПОДГОТОВКИ ТОРФЯНЫХ МЕСТОРОЖДЕНИЙ
ИРЕМОНТА ТЕХНОЛОГИЧЕСКИХ ПЛОЩАДЕЙ
|
№ |
|
Наименование |
|
|
|
|
|
Марка ма- |
|
|
Рабочий орган |
Основные |
|||
|
п/п |
технологической операции |
|
|
шины |
|
|
|
|
парамет- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ры |
|
1 |
|
Создание каналов осушительной |
|
ТЭ-3М |
|
|
Драглайн или |
Lc=12,5м3 |
|||||||
|
|
|
водоотводящей сети |
|
|
|
МТП-71 |
|
|
Обратн.лопата |
Vдр=0,5м3 |
|||||
|
2 |
|
Рытье канав регулирующей сети |
|
МТП-71 |
|
|
Профил.ковш |
Vпк=1м3 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
К-1Б |
|
|
Мн.ковш.рама |
Vк1=45л |
|
|
|
|
|
|
|
|
|
|
|
|
МТП-32 |
|
|
Конусная фреза |
D=3,8 м |
|
|
|
|
|
|
|
|
|
|
|
|
МТП-37 |
|
|
|
|
Кот=0,25 |
|
|
|
|
|
|
|
|
|
У |
|||||||
|
3 |
|
Сводка древесной растительности |
|
ЭТУ-0,7 |
|
|
Дисковая пила |
Dп=1,5 м |
|||||||
|
|
|
|
|
|
|
|
|
|
|
МТП-13 |
|
|
на стреле |
|
b=45 мм |
|
|
|
|
|
|
|
|
|
|
|
МТП-43 |
|
|
(Н =13м) |
|
v =48 м/c |
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
Тp |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пол |
||
|
4 |
|
Разделка и погрузка деревьев |
|
|
РОП-3 |
|
|
Захват, прот.- |
Dmaх=0,3м |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
обрез.выд.устр |
|
|
|
|
|
|
|
|
|
|
|
Н |
|||||||
|
5 |
|
Сплошная корчевка пней |
|
|
РКШ-1 |
|
|
Пас.роторы N=5 шт |
|||||||
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КУП-4 |
|
|
Актив ротор |
В=3,0 м |
|
|
|
|
|
|
|
|
|
|
|
|
МТП-26 |
|
|
+сепаратор |
|
Н=0,4 м |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МТП-81 |
|
|
+конвейер |
|
|
|
6 |
|
Валкование пней и подкорчевка |
|
МП-3 КС |
|
|
Ротор с клыками |
В=2,4 м |
|||||||
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
α=54° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
Погрузка пней в прицепы |
|
|
МТТ-12 |
|
|
Грейфер |
|
mгр=1,3 т |
|||||
|
|
|
|
|
|
|
|
|
|
|
МТП-29 |
|
|
Роторный |
|
В=3,0 м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сепар.+конв. |
Н=4,6 м |
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
||
|
8 |
|
Вывозка деревьев и пней |
|
|
МТП-24 |
|
|
Прицеп- |
|
mгр=9 т |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
самосвал |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vк+б.=20м |
|
|
|
|
|
|
залежи |
о |
|
|
|
|
винтов.фреза |
b=0,25 м |
||||
|
9 |
|
Сбор мелкого пня |
|
|
|
СП-6,7 |
|
|
Игл.барабан |
В=6,7 м |
|||||
|
|
|
|
|
|
|
|
|
СПМ-1 |
|
|
Цепн.роторы |
|
|||
|
|
|
|
закрытого |
|
|
|
|
|
|
|
|
|
|
||
|
10 |
|
Фрезерован е |
|
с очесом и |
|
МТП-42 |
|
|
Фреза с чаш. |
В=1,7 м |
|||||
|
|
|
древесными включен ями |
|
|
|
|
|
ножами |
|
Н=0,4 м |
|||||
|
|
|
Обогащение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
верхнего пласта залежи |
МЩФ-0 |
|
|
Вертикальная |
Н=2,2 м |
|||||||
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
Укладка |
|
|
дренажа |
|
|
МЭД-1 |
|
|
Винт-фреза |
|
Мат.дрен. |
||
|
|
|
|
|
|
|
|
|
|
|
МГД-6Н |
|
|
Цепной бар |
|
Н=2,5м |
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
400м3/ч |
||
|
13 |
|
Ремонт картовых канав |
|
|
|
РК-1 |
|
|
Конус.фреза |
||||||
|
14 |
|
Прочистка мостовых труб |
|
|
ПТМ-1 |
|
|
Вибр.головка |
НКФ-4 |
||||||
Р |
15 |
|
Профилирование и планировка по- |
|
МТП-52 |
|
|
Фронтальная |
В=5,7 м |
|||||||
|
|
|
|
|
||||||||||||
|
|
|
в рхности карт |
|
|
|
|
|
МТП-53 |
|
|
шнек-фреза |
|
α=(0-5)° |
||
6.1 Одноковшовые экскаваторы |
|
|
|
|
|
|
|
|
|
|||||||||
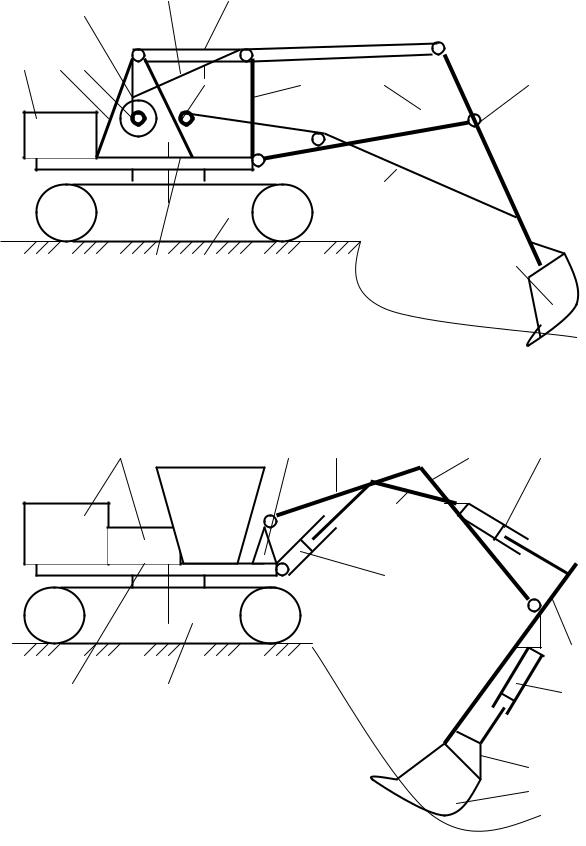
|
|
|
|
|
6.1.1 Экскаватор с механическим приводом |
|
|
|
||||||||||
|
|
|
6 |
|
|
8 |
|
9 |
|
|
|
|
|
|
|
|
||
|
3 |
4 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
11 |
12 |
|
|
|
13 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
Н |
14 |
|
||
|
1 – гусеничный движитель; |
|
|
|
|
|
|
|
||||||||||
|
2 – поворотная платформа; |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
Б |
|
|
|
|||||||||
|
3 – двигатель; |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
4 – двуногая стойка; |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
5, 6, 7 – лебедки поворота стойки |
управления стрелой, тяговая лебедка; |
||||||||||||||||
|
8, 9, 10 – канаты подъемной лебедки, поворота стойки и тяговой лебедки; |
|||||||||||||||||
|
11 – стойка; |
12 – стрела; |
13 – |
|
|
й |
Рис.6.1.1 |
|
||||||||||
|
укоять; |
14 – ковш. |
|
|||||||||||||||
|
|
|
|
|
6.1.2 |
|
|
|
с |
|
авлическим приводом |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
гид |
|
|
|
|
|
|
||
|
|
|
|
|
3 |
|
|
4 |
р |
5 |
|
6 |
|
|
8 |
10 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Экскаватор |
|
|
|
|
7 |
|
|
|
|
||
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
и |
|
|
|
|
|
|
10 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
п2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
12 |
|||
|
1 – гусеничный движитель; |
|
|
|
|
|
|
|
|
|
||||||||
е2 – поворотная платформа; |
|
|
|
|
|
|
|
|
|
|
||||||||
Р |
3 – двигатель с насосной станцией; |
|
|
|
|
|
|
|
|
|||||||||
4 – кабина с органами управления; |
|
|
|
|
|
|
|
13 |
||||||||||
5 – стойка; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
6, 7, 8 – стрела; |
|
|
|
|
|
|
|
|
|
|
|
|
14 |
||||
|
9 – рукоять; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
10, 11, 12 – гидроцилиндры; |
|
|
|
|
|
|
|
|
|
||||||||
|
13 – подвижный четырехзвенник; |
|
|
|
|
|
|
|
|
|||||||||
|
14 – ковш. |
|
|
|
|
|
|
|
|
|
Рис.6.1.2. |
|
|
|
|
|||
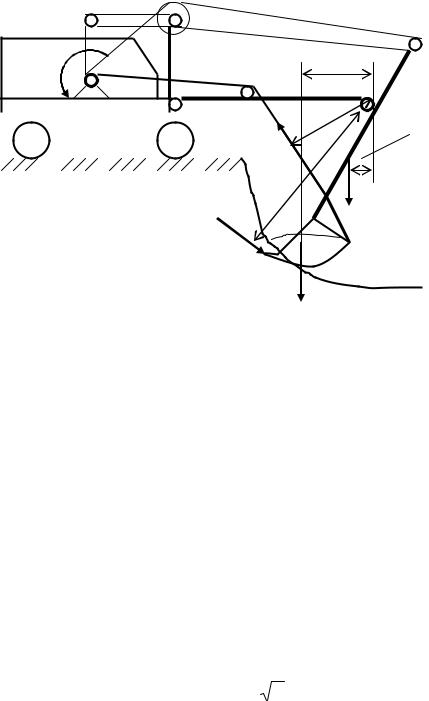
6.1.3 Мощность для привода тяговой лебедки экскаватора
МТ.Л |
h2 |
|
|
|
|
|
|
|
|
|
|
|
S1+S2 |
|
|
H |
|
|
А |
h3 |
|
У |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h1 |
|
|
|
|
|
|
Т |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Рис. 6.1.3. Расчетная схема |
|
|
|
|
|
|
|
|
Gк+Gт |
Н |
|
|||||||||||
|
|
|
|
к определению тягового усилия |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
тяговой |
|
||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|||||
|
|
|
|
Во время зачерпывания грунта канат |
|
|
|
|
лебедки имеет натяжение |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S=S1+S2 , Н |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
||||||
где S |
|
- натяжение каната от действ я с лы сопротивления резанию грунта Р ; |
||||||||||||||||||||||||
|
S2 |
- натяжение каната от действия веса |
|
|
|
|
|
Gр, веса ковша с грунтом Gк+Gт. |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Значения необходимых натяженийукоятив тяговом канате определяются из урав- |
||||||||||||||||||||||
нений равновесия момент в действующих сил относительно точки А поворота |
||||||||||||||||||||||||||
рукояти: |
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
S1 H – P1 h1=0, |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
з |
|
|
|
S H – (G +G ) h |
- G h =0. |
|
|
|
|||||||||||||
|
|
|
|
|
т2 |
|
|
|
|
к |
|
|
т |
2 |
|
|
р 3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Разрешив х относ тельно |
S1 |
и |
|
S2 |
получаем развернутое |
выражение |
||||||||||||||||
|
|
определения |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||
для |
|
|
|
|
суммарного натяжения в тяговом канате: |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
S=S1+S2=( P1 h1+(Gк+Gт) h2+ Gр h3)/H. |
|
|
||||||||||||||||
|
|
|
|
Усилие с пр тивления резанию грунта Р1=рF, |
|
|
|
|
||||||||||||||||||
гдек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
р – удельн е с противление резанию грунта |
|
|
|
|
|
|
|
||||||||||||||||||
Р |
|
|
|
( для торфяной залежи p 15000 / |
, Н/м ); |
|
|
|
|
|||||||||||||||||
пF = B – площадь поперечного сечения снимаемого слоя грунта, м2; |
||||||||||||||||||||||||||
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– толщина снимаемого слоя, м; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
B – ширина ковша, м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Мощность для привода тяговой лебедки |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
NT |
|
|
|
S T |
|
|
, кВт |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
n.л |
|
|
|
|
|||||||
где Т – скорость наматывания каната на барабан лебедки, м/с; i – кратность полиспаста;
п.л – КПД привода лебедки.
|
6.2 МАШИНЫ ДЛЯ СВОДКИ ЛЕСА, |
|
|
|
||||||||
|
|
|
|
РАЗДЕЛКИ, ПОГРУЗКИ И ВЫВОЗКИ ДРЕВЕСИНЫ |
||||||||
|
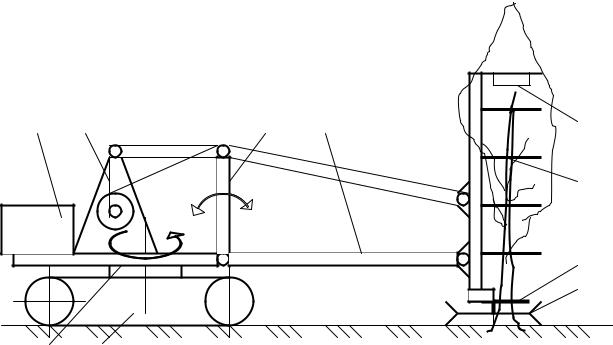
6.2.1 Машины для сводки леса |
|
|
|
|
|||||||
|
Наибольшее распространение в торфяной промышленности при подготовке |
|||||||||||
месторождений к эксплуатации, в частности, для сплошной сводки деревьев вместе |
||||||||||||
с |
кустарником |
получили |
|
машины |
ЭТУ-0,75 (ЭСЛ-4), МТП-13 |
и МТП-43. |
||||||
С их помощью производится спиливание и укладка в валок деревьев с диаметром |
||||||||||||
у комля до 300 мм и высотой 16-18 м при ширине обрабатываемой полосы |
||||||||||||
за один проход 13-15 м. Машины выполнены на базе одноковшовых экскаваторов |
||||||||||||
ТЭ-2(3) , МТП-71 или погрузочного крана КПТ-1. |
|
|
У |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
3 |
4 |
|
|
|
5 |
|
6 |
Н |
10 |
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Б |
|
9 |
|
|
|
|
|
|
|
|
|
й |
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
и |
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
р |
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2 |
|
1 |
|
|
|
о |
|
|
|
|
|
|
1 – движитель, 2 – поворотная платформа, 3 – двигатель, 4 – основная стойка с |
|||||||||||
|
приводными |
|
|
, 5 – стойка, 6 - стрела, 7 – дисковая пила с приводом, |
||||||||
|
8 – неп движный диск, 9 – пакетирующее устройство, 10 - выталкиватель |
|||||||||||
|
|
|
|
барабанами |
|
|
|
|
|
|
||
|
|
|
з |
Рис.6.2.1. Принципиальная схема |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
машины для сводки и пакетирования деревьев |
|
|||||||
|
|
о |
|
|
|
|
|
|
|
|
||
|
Рабочее оборудование – дисковая пила с неподвижным диском над ней |
|||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
и пак тирующее устройство вывешены на стреле, которая закреплена шарнирно |
||||||||||||
на поворотной платформе экскаватора и управляются тяговыми канатами или гид- |
||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
роцилиндрами. Привод пилы, в зависимости от базовой машины, механический че- |
||||||||||||
рез карданные телескопические валы и конический редуктор, гидро- или электро- |
||||||||||||
механический. |
|
|
|
|
|
|
|
|
|
|||
Р |
|
|
|
|
|
|
|
|
|
|
|
|