14. Электромагнитные процессы в якорной цепи двигателя системы электропривода "нереверсивный полууправляемый выпрямитель - двигатель постоянного тока".
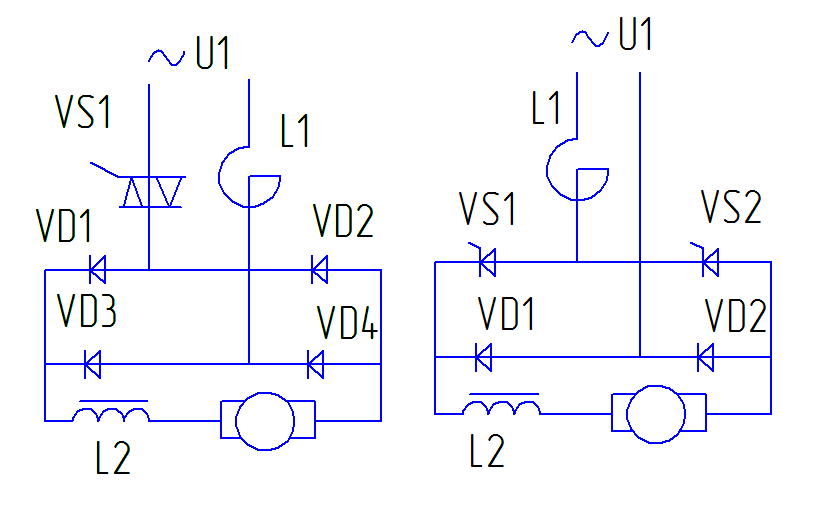
В схеме с симистором регулирование происходтит на стороне переменного тока симистором VS1. Диодный мост осуществляет лишь выпрямление.
Во второй схеме ругулирующими элементами являются тиристоры VS1-VS2
Вследствие наличия диодов шунтирующих якорную цепь в кривой выпрямленного напряженя отсутствуют участки отрицательной полярности
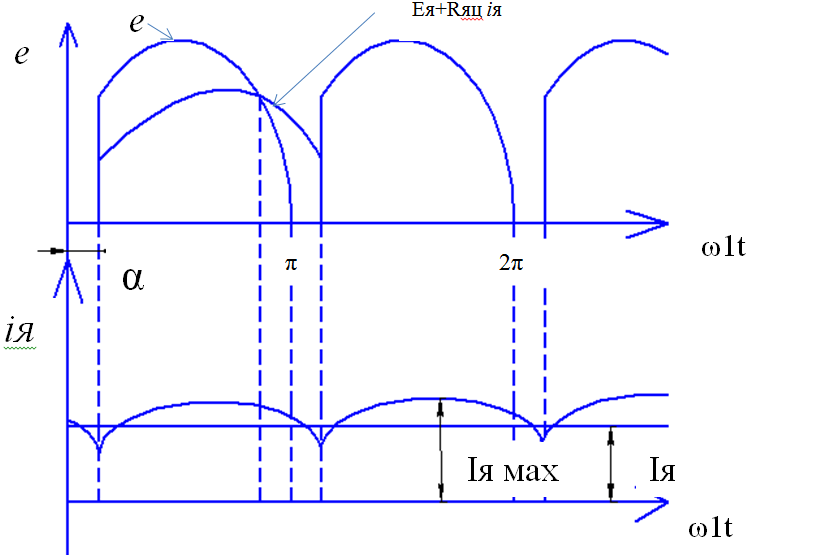
15. Характеристика управления полууправляемого выпрямителя в режиме непрерывного тока. Минимальный граничный угол открывания. Начальный угол открывания. Максимальный угол открывания.

Зависимость
постоянной составляющей ЭДС от угла
α называется характеристикой управления

 для
однофазных выпрямителей
для
однофазных выпрямителей
 3хфазный
мостовой полууправляемый
3хфазный
мостовой полууправляемый
Граничный
угол
 можно определить как и для управляемых
схем.
можно определить как и для управляемых
схем.
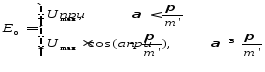
Из
кривой ЭДС выпрямителя видно, что Е=0
при угле
 ,
однако по условию безаварийной работы
выпрямителя
,
однако по условию безаварийной работы
выпрямителя
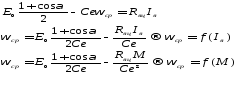
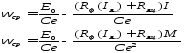
16. Электромеханические и механические характеристики системы электропривода "полууправляемый выпрямитель - двигатель постоянного тока".
Рассмотрим характеристики для РНТ.


 ;
;

Граница
РГНТ определяется по формуле:
 ,
где
,
где - фазовый угол, определяемый параметрами
схемы.
- фазовый угол, определяемый параметрами
схемы.
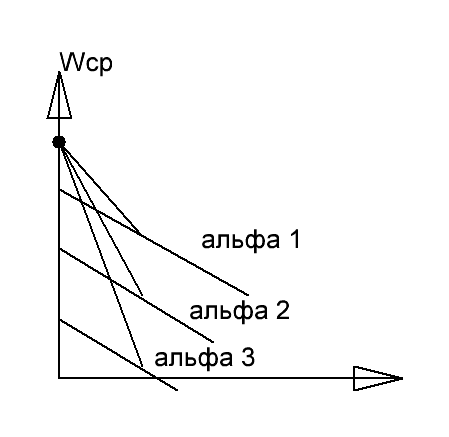
Как и для управляемого выпрямителя в данном случае характеристика эл.мех. и мех. в РПТ не линейна, поэтому по приведенным формулам определяются точки пересечения характеристик для РНТ и эти точки соединяются с точками ω0 для соответствующих углов α. В следствии наличия РПТ, который обусловлен пульсирующим характером выходного напряжения, скорость двигателя возрастает, т.е. в РПТ выпрямитель теряет свою управляемость и для обеспечения работы необходимо ввести связь по скорости или ЭДС якоря. Из-за наличия в схеме шунтирующих диодов данная система ЭП может работать лишь в двигательном режиме.
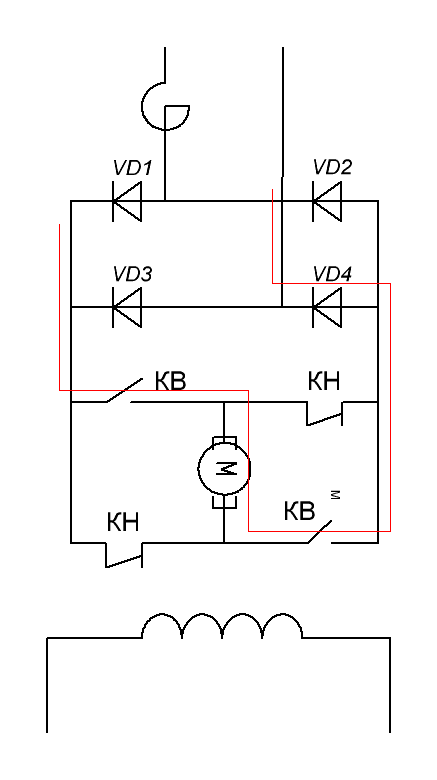
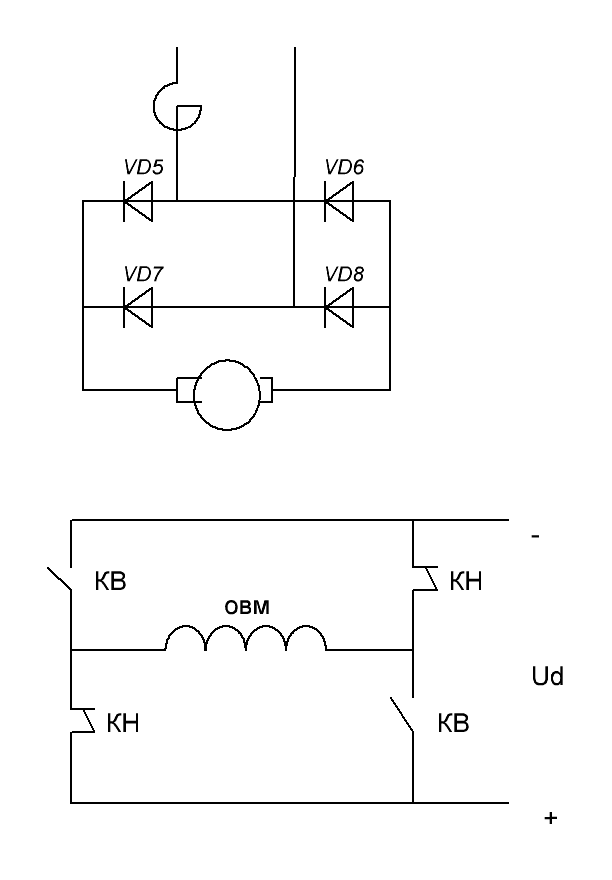
17. Реверсирование в системе электропривода "нереверсивный выпрямитель - двигатель постоянного тока".
Реверсивным
называется ЭП позволяющий изменять
направление вращения двигателя.
Направление вращения определяется
знаком электромагнитного момента. Для
двигателя постоянного тока момент
определяется выражением:
 .
Из него очевидно, что изменить направление
момента возможно либо изменив направление
тока якоря, либо изменив направление
тока возбуждения и следовательно
магнитного потока.
.
Из него очевидно, что изменить направление
момента возможно либо изменив направление
тока якоря, либо изменив направление
тока возбуждения и следовательно
магнитного потока.
НВ является однонаправленным устройством, в которм ток проходит тольков одном направлении, поэтому в системах ЭП с НВ, реверсирование тока, а следовательно момента и скорости можно выполнить установив в цепь якоря или в цепь ОВ специальное устройство, называемое РЕВЕРСОРОМ.
Реверсор
предназначен для изменения направления
вращения, за счёт изменения полярности
подключения якорной цепи или цепи
возбуждения к НВ. Для обеспечения
вращения двигателя вперёд замыкаются
контакты КВ и размыкаются контакты КН.
Для обеспечения вращения назад, замкнуты
контакты КН и разомкнуты КВ. При реверсе
по цепи якоря управление осуществляется
в силовой цепи( со значительным током),
а при реверсе по цепи возбуждения
управление осущ. По цепи возбуждения(с
малым током). Следовательно реверсор
для цепи возбуждения имеет меньшую
массу, габариты и стоимость. Реверсор
представляет собой коммутационный или
бесконтактный аппарат. Однако цепь
возбуждения из-за значительной
индуктивности имеет значительно большую
инерционность(постоянную времени ).
Однако т.к. реверсоры используются для
реверсирования двигателей в механизмах
с низким быстродействием, от как правило
реверсоры применяются в цепях ОВ.
).
Однако т.к. реверсоры используются для
реверсирования двигателей в механизмах
с низким быстродействием, от как правило
реверсоры применяются в цепях ОВ.