

37. Электромагнитные процессы в якорной цепи двигателя системы электропривода «реверсивный пшиу – дпт» с диагональной коммутацией.
При
диагональной коммутации открывающие
импульсы подаются только на одну пару
транзисторов, которая определяет
направление вращения двигателя. На VT2,
VT3 при вращении вперёд или на VT1, VT4 –
назад. Вследствие такой коммутации в
схеме отсутствует путь для протекания
тока в обратном направлении. Поэтому
система может работать либо в режиме
непрерывного тока, либо в режиме
прерывистого тока и если нагрузка
двигателя двигателя достаточна для
того, чтобы ток не спадал до нуля на
интервалах
 .
.
При
этом процессы, протекающие в схеме
аналогичны процессам в схеме с симметричной
коммутацией при однополярном токе. Если
же энергии недостаточно для протекания
тока на интервале
 ,
ток становится прерывистый. При Этом
изменяется форма напряжения на якоре.
В кривой появляется ступенька, равная
по величине ЭДС якоря. Изменение формы
напряжения приводит к увеличению
напряжения на якоре в РПТ, по сравнению
с РНТ. Т. к. система ЭП работает в режиме
непрерывного и прерывистого тока, то
механические и электромеханические
характеристики будут состоять из 2-ух
участков: для РПТ и для РНТ. Упрощённое
построение характеристик аналогично
как для системы одноключевой ПШИУ ДПТ.
,
ток становится прерывистый. При Этом
изменяется форма напряжения на якоре.
В кривой появляется ступенька, равная
по величине ЭДС якоря. Изменение формы
напряжения приводит к увеличению
напряжения на якоре в РПТ, по сравнению
с РНТ. Т. к. система ЭП работает в режиме
непрерывного и прерывистого тока, то
механические и электромеханические
характеристики будут состоять из 2-ух
участков: для РПТ и для РНТ. Упрощённое
построение характеристик аналогично
как для системы одноключевой ПШИУ ДПТ.
38. Датчики координат автоматизированного электропривода. Структурная схема датчика.
Датчики в АЭП предназначены для преобразования регулируемой координаты в электрический сигнал, используемый как сигнал обратной связи. Регулируемыми величинами в ЭП являются механические и электрические величины. Механические: положение, скорость, момент. Электрические: напряжение, ЭДС, ток.

Структурно датчик состоит из след. элементов:
ПИП – первичный измерительный преобразователь, который осуществляет преобразование измеряемой координаты (механической или электрической) в электрический сигнал.
УГР – устройство гальванической развязки, которое предназначено для разделения цепей управления с низким потенциалом по отношению к земле от силовой цепи с высоким потенциалом по отношению к земле. Гальваническая развязка необходима для обеспечения электробезопасности обслуживающего персонала и повышения помехоустойчивости системы управления.
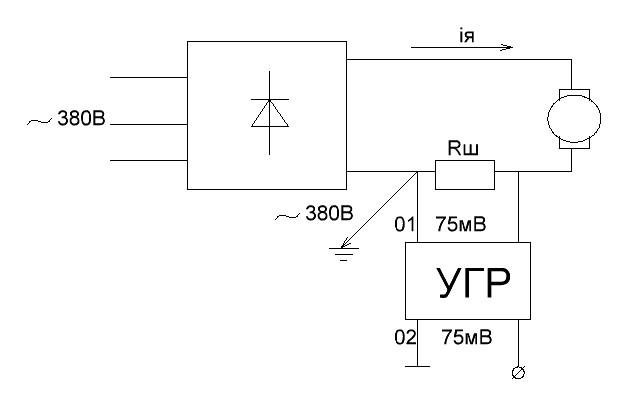
Напряжение между 01 и землёй по величине соответствует питающему напряжению и поэтому опасно для обслуживающего персонала. Напряжение между узлом 02 и землёй не превышает напряжения источника питания на вторичной стороне УГР и поэтому не будет опасно (15В, 5В). 3) СЭ – согласующий элемент, который предназначен для согласования первичного измерительного преобразователя по форме и по величине с входным сигналом системы управления ЭП (с требуемым входным сигналом).
Необходимой заметить, что в некоторых случаях единичные элементы из структурной схемы датчиков могут отсутствовать.
39. Датчик тока якоря на основе трансформатора тока в системе «однофазный управляемый выпрямитель – дпт». Выбор трансформатора тока. Технические требования к датчикам тока.
Датчик тока состоит из трансформатора тока TI1, нагрузочного резистора RTT и измерительного диодного выпрямителя.
В каждый момент времени мгновенное значение тока якоря равно мгновенному значению тока сети= току первичной обмотки трансформатора I1.
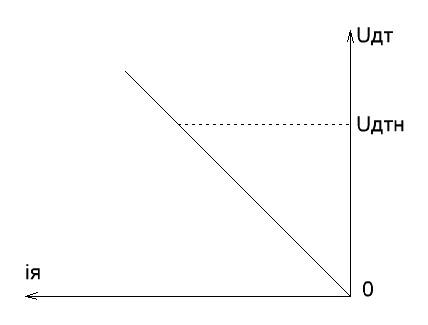
Определим
коэффициент передачи датчика тока
(называется отношение выходной координаты
УДТ к входной координате iЯ).

 - коэффициент трансформации трансформатора
тока.
- коэффициент трансформации трансформатора
тока. - действующее значение номинального
тока первичной обмотки трансформатора
тока.
- действующее значение номинального
тока первичной обмотки трансформатора
тока. - действующее значение номинального
тока вторичной обмотки трансформатора
тока. Как правило,
- действующее значение номинального
тока вторичной обмотки трансформатора
тока. Как правило,
 Т.
к. Измерительный выпрямитель VD1-VD4 лишь
выпрямляет мгновенное значение вторичного
напряжения, то коэффициент схемы по
мгновенным значениям равен 1 (пренебрегая
падением напряжения на диодах VD1-VD4).
Т.к.трансформатор
тока работает в
режиме
к. з., то RTT
должно
быть
близким к нулю, как правило, RTTH
номинальное равно
0,2
Ом.
Т.
к. Измерительный выпрямитель VD1-VD4 лишь
выпрямляет мгновенное значение вторичного
напряжения, то коэффициент схемы по
мгновенным значениям равен 1 (пренебрегая
падением напряжения на диодах VD1-VD4).
Т.к.трансформатор
тока работает в
режиме
к. з., то RTT
должно
быть
близким к нулю, как правило, RTTH
номинальное равно
0,2
Ом.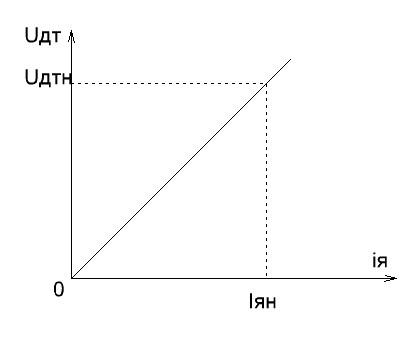

Трансформатор
тока выбирается по первичному току из
следующего соотношения:

 - действующее значение IT,
соответствующего номинального току
двигателя.
- действующее значение IT,
соответствующего номинального току
двигателя.
Пользуясь
формулой для определения действующего
значения тока: Действующее
значение прямоугольного двухполярного
тока равного амплитуде прямоугольника.
Тогда выбор осуществляется по :
Действующее
значение прямоугольного двухполярного
тока равного амплитуде прямоугольника.
Тогда выбор осуществляется по :
 Как
правило изготовитель трансформатора
указывает номинальное значение
сопротивления RTT,
или
мощность допустимую на вторичной обмотке
трансформатора.Из выражения коэффициента
датчика тока
Как
правило изготовитель трансформатора
указывает номинальное значение
сопротивления RTT,
или
мощность допустимую на вторичной обмотке
трансформатора.Из выражения коэффициента
датчика тока
управления

 Если
Если

Данный датчик не обеспечивает информацией о направлении тока якоря.