

57. Фотоэлектрический преобразователь перемещения. Устройство и принцип действия, назначение.
Фотоэлектрический преобразователь перемещения состоит из механической части и электронной. Механическая часть служит для крепления самого преобразователя, крепления разъёма на преобразователе, а также соединения вала преобразователя с валом двигателя или механизма, перемещение которого измеряется.
Фотоэлектрический преобразователь бывает круговой и линейный.
КРУГОВОЙ ПРЕОБРАЗОВАТЕЛЬ: Содержит также оптическую и электронную часть.
Оптическая
часть служит для усиления и фокусировки
светового потока.
В простейшем случае на валу ФЭП закрепляется диск, который вращается при вращении вала двигателя и вала ФЭП.
Светодиоды
и фотодиоды неподвижны во время вращения
вала, следовательно, при вращении вала
будет проходить модуляция светового
потока ( прохождение через отверстие и
не прохождение).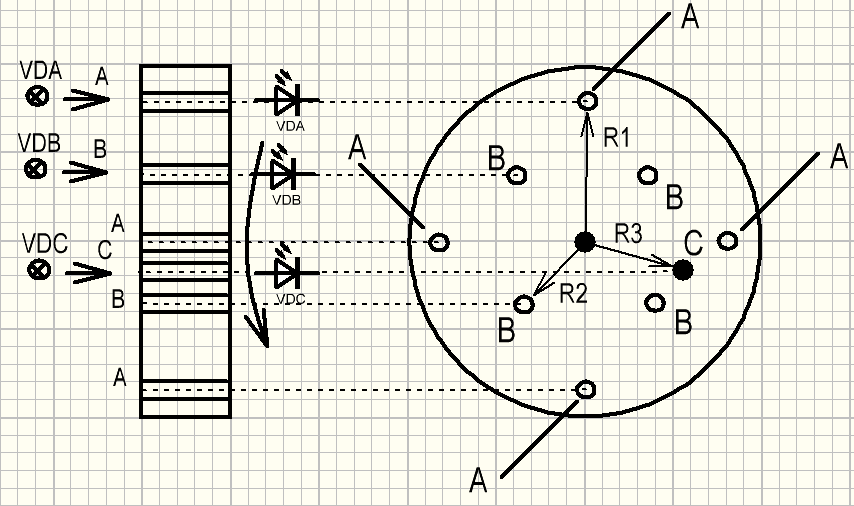
В данной модели фотоэлектрического преобразователя на каждом из каналов «А» и «В» свет от светодиода прервётся 4 раза 1 оборот, а на канале «С» -- 1 раз за оборот. Следовательно, фотодиоды на каждом из каналов «А» и «В» пропускает ток 4 раза за 1 оборот, а на канале «С» --1 раз за 1 оборот.
Электрическая часть преобразует фототок фотодиодов в
последовательность прямоугольных импульсов с напряжением
приблизительно равным «Uпит».
У фотоэлектрического преобразователя 3 основных канала: «Ua, Ub, Uc», котрые формируются в результате модуляции светового потока вращающегося диска. Дополнительно инвертированные импульсы формируются в результате преобразования основных импульсов электронной системы (нужно поставить логический инвертор).
Число
импульсов на основных каналах: «Ua,
Ub,
 ,
, »
соответствует угловому
»
соответствует угловому
перемещению.
Число
импульсов с канала «Uc» соответствует
угловому перемещению за 1 оборот вала.
Точность измерения равна N-число импульсом
за 1 оборот. Для повышения точности
измерения ФЭП нужно осуществить удвоение
или учетверение импульсов. При удвоении
используются импульсы с 2-ух каналов,
при учетверении – с 4-ёх каналов.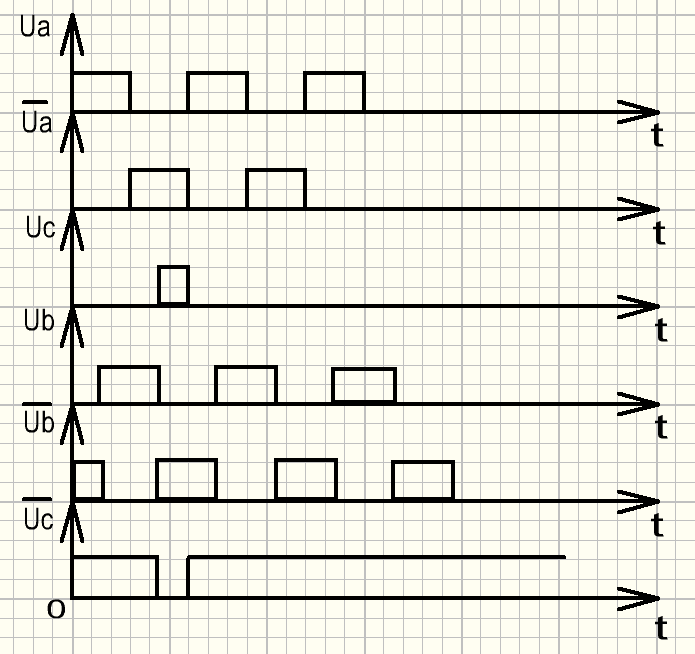
С помощью ФЭП можно получить сигнал пропорциональный скорости вала ФЭП.
 ;
;  ;
; .
.
N(1) – число импульсов с выхода ФЭП за эталонное время Tэ. Nэ (2) – эталонное число импульсов (постоянное) за измеренное время «t». При измерении по выражению (1) угловая скорость пропорциональна числу импульсов измеренных за Tэ. При измерении по формуле (2) угловая скорость находится в обратно пропорциональной зависимости от измеряемой величины Tэ.
58. Устройство индуктосина. Преобразование аналоговых сигналов индуктосина в последовательность импульсов.
Индуктосин – это индукционный преобразователь перемещения (первичный преобразователь датчик перемещения). Он представляет собой вращающийся элемент микромашины «дискового» ротора и статора. На изолированном диске ротора расположена обмотка возбуждения, выполненная, как и обмотка статора, способом химического «травления» и представляющей собой радиальные проводники, соединённые по внутреннему и внешнему контуру перемычкой. Обмотка возбуждения получает питание от вторичной обмотки трансформатора, размещённой на диске ротора.
На
стороне индуктосина размещены 2 обмотки
пространственно смещённые друг от друга
на четверть шага.
Принцип действия у индуктосина как и у любой электрической машины. На обмотку возбуждения ротора подаётся переменное напряжение и протекающий по обмотке ток создаёт магнитный поток (пульсирующий магнитный поток). При перемещении ротора относительно статора пульсирующий магнитный поток ротора пересекает витки обмоток статора, в которых наводится ЭДС, сдвинутые друг от друга на 90 электрических градусов.
ЭДС, наводимая в статорных обмотках, изменяется по синусоидальному закону с частотой, равной частоте изменения магнитного потока и амплитуде, зависящей от угла поворота ротора относительно статора.
где,
1—индуктосин;
2 – воздушный трансформатор;
3 – высокочастотный генератор синусоидального питания;
4 – фозочувствительный усилитель;
5 – формирователь импульсов;
6 – обмотка возбуждения;
7 – статорные обмотки индуктосина.
Генератор (3) формирует высокочастотное синусоидальное «U», которое через (2) поступает на «ОВ» (6).
При вращении ротора в обмотках статора будут наводиться ЭДС.
Величина
этих ЭДС определяется по формуле:

 где,
Кт – коэффициент трансформации между
статором и ротором; Em
– амплитудное значение ЭДС «ОВ»;
где,
Кт – коэффициент трансформации между
статором и ротором; Em
– амплитудное значение ЭДС «ОВ»;
 -- угловая частота напряжение генератора;
-- угловая частота напряжение генератора; – угол поворота ротора относительно
статора.
– угол поворота ротора относительно
статора.
Амплитуда
e1 и e2
зависит от « ».
».

В
интервалы времени совпадения электрических
фаз напряжения «Uг» и ЭДС: E1 и E2, на
выходах фозочувчтвительных усилителей
(4) выделяется положительные полуволны
Em1 и Em2. Эти полуволны преобразуются
формирователем (5) в последовательность
прямоугольных импульсов «Uд1» и «Uд2».
Число импульсов на выходе каждого из
каналов индуктосионного датчика
перемещения пропорционально углу
поворота ротора «угол
 »
относительно статора.
»
относительно статора.
Это один из способов преобразования синусоидального сигнала, амплитуда которого пропорциональна углу поворота ротора, в последовательность прямоугольных импульсов, число которых пропорционально углу поворота ротора.
На
затвор транзистора подаётся «Uг»,
которым управляет коэффициент усиления.
Когда «VT1» открыт, следовательно, коэффициент усиления = -1.
Когда закрыт коэффициент усиления = +1.
Огибающие
кривые «e1
и e2»
показывают изменение амплитуды «e1
и e2»
в зависимости от угла
 .
.
1. Понятие ЭАЭП. Классификация ЭАЭП. Понятие "система электропривода".
2. Классификация выпрямителей в АЭП. Структурная схема выпрямителя.
3. Хар-ка управления СИФУ при пилообразном опорном напр. Напряжение смещения.
4. Характеристика управления СИФУ при Cos опорном напр. Напряжение смещения.
5. Схемы силовых цепей системы ЭП "нереверсивный выпрямитель -ДПТ".
6. Эквив. электр. схема замещ. сист. ЭП "нереверсивный управляемый выпрямитель -ДПТ".
7. Электромагнитные процессы в якорной цепи двигателя системы ЭП "однофазный управляемый выпрямитель - ДПТ" в режиме непрерывного тока.
8. Хар-ка управления вентильного комплекта управляемого выпрямителя в РНТ. Минимальный граничный угол открывания.
9. Режим работы системы электропривода "ОУВ - ДПТ" при гранично-непрерывном токе.
10. Электромагнитные процессы в якорной цепи двигателя системы "ОУВ - ДПТ" в режиме прерывистого тока. Начальный угол открывания. Максимальный угол открывания.
11. Электромеханические и механические характеристики системы электропривода "нереверсивный управляемый выпрямитель - двигатель постоянного тока" в режиме непрерывного тока.
12. Электромеханические и механические характеристики системы электропривода "нереверсивный управляемый выпрямитель - двигатель постоянного тока" в режиме прерывистого тока.
13. Режимы работы системы электропривода «нереверсивный УВ-ДПТ».
14. Электромагнитные процессы в якорной цепи двигателя системы электропривода "нереверсивный полууправляемый выпрямитель - двигатель постоянного тока".
15. Характеристика управления полууправляемого выпрямителя в режиме непрерывного тока. Минимальный граничный угол открывания. Начальный угол открывания. Максимальный угол открывания.
16. Электромеханические и механические характеристики системы электропривода "полууправляемый выпрямитель - двигатель постоянного тока".
17. Реверсирование в системе электропривода "нереверсивный выпрямитель - двигатель постоянного тока".
18. Электромагнитные процессы в якорной цепи двигателя системы электропривода "управляемый выпрямитель - двигатель постоянного тока" в режиме рекуперативного торможения.
19. Условия обеспечения рекуперативного торможения двигателя в системе электропривода " управляемый выпрямитель - двигатель постоянного тока". Максимальный угол открывания.
20. Электромеханические и механические характеристики системы электропривода "управляемый нереверсивный выпрямитель с реверсором - двигатель постоянного тока" для тормозного режима работы двигателя.
21. . Системы электропривода «реверсивный выпрямитель – двигатель постоянного тока».
22. Совместное управление комплектами тиристоров реверсивного выпрямителя. Уравнительный ток. Согласованное управление комплектами тиристоров.
23. Электромеханические и механические характеристики реверсивного электропривода с совместным управлением.
24. Торможение двигателя в системе «реверсивный выпрямитель с совместным управлением – двигатель постоянного тока». Достоинства и недостатки системы.
25. Система электропривода "реверсивный выпрямитель с раздельным управлением - двигатель постоянного тока".
26. Реверсирование двигателя в системе электропривода "реверсивный выпрямитель с раздельным управлением - двигатель постоянного тока".
27. Датчик проводимости вентилей системы управления вентилями при раздельном управлении. Переключатель характеристики системы управления вентилями при раздельном управлении. Достоинства и недостатки раздельного управления.
28. Коэффициент использования двигателя постоянного тока по моменту в системе электропривода "выпрямитель - двигатель постоянного тока".
29. Характеристика управления выпрямителя. Коэффициент передачи выпрямителя. 30. Система электропривода "ПШИУ - ДПТ". Характеристики управления широтно- импульсного модулятора при однополярном и двухполярном опорном напряжениях.
31. Электромагн процессы в яц системы ЭП "нереверсивный одноключевой ПШИУ - ДПТ".
32. Электромагнитные процессы в якорной цепи системы ЭП "полумостовой ПШИУ - ДПТ".
33. Электромех хар-ки ДПТ в системе ЭП "нереверсивный одноключевой ПШИУ - ДПТ".
34. Электромеханические характеристики ДПТ в системе ЭП "полумостовой ПШИУ - ДПТ".
35. Электромагнитные процессы в якорной цепи двигателя системы электропривода "реверсивный ПШИУ - ДПТ" с несимметричной коммутацией.
36. Электромагнитные процессы в якорной цепи двигателя системы ЭП "реверсивный ПШИУ - ДПТ" с симметричной коммутацией.
37. Электромагнитные процессы в якорной цепи двигателя системы ЭП "реверсивный ПШИУ - ДПТ" с диагональной коммутацией.
38. Датчики координат автоматизированного электропривода. Структурная схема датчика.
39. Датчик тока якоря на основе трансформатора тока в системе «однофазный управляемый выпрямитель – ДПТ». Выбор трансформатора тока. Технические требования к датчикам тока.
40. Датчик тока якоря на основе трансформатора тока в системе «трехфазный выпрямитель – ДПТ». Достоинства и недостатки трансформаторных датчиков тока.
41. Датчик тока на основе элемента Холла.
42. Датчик тока на основе сглаживающего дросселя.
43. Датчик тока на основе шунта.
44. Устройство трансформаторной гальванической развязки.
45. Устройство дискретной оптоэлектронной гальванической развязки.
46. Устройство аналоговой оптоэлектронной гальванической развязки.
47. Система электропривода "бесконтактный двигатель постоянного тока".
48. Электромагнитные процессы в цепи якоря синхронного двигателя в системе электропривода БДПТ при несимметричной коммутации.
49. Электромагнитные процессы в цепи якоря синхронного двигателя в системе электропривода БДПТ при симметричной коммутации.
50. Эквивалентная схема якорной цепи системы электропривода БДПТ. Электромеханические и механические характеристики.
51. Система ЭП "непосредственный преобразователь частоты - асинхронный двигатель".
52. Система ЭП "двухзвенный преобразователь частоты – АД с управляемым выпрямителем.
53. Система ЭП "двухзвенный преобразователь частоты с ШИМ - асинхронный двигатель".
54. Система электропривода "бесконтактный двигатель переменного тока".
55. Торможение в системе ЭП «двухзвенный преобразователь частоты – АД».
56. Система ЭП "полупроводниковый преобразователь переменного напряжения - АД".
57. Фотоэлектрический преобразователь перемещ. Устр-во и принцип действия,назначение.
58. Устройство индуктосина. Преобразование аналоговых сигналов индуктосина в последовательность импульсов.