

45. Устройство дискретной оптоэлектронной гальванической развязки.
ГТН – генератор тактового напряжения. Основой является оптопара VT1, работающая по принципу «включено-выключено», т.е. если диод оптопары открыт, то VT тоже открыт и на выходе присутствует сигнал лог. «0». Если закрыт, то тоже закрыт и на выходе сигнал лог. «1». Для функционирования УГР на дисктрет. оптопаре надо преобраз. вх. постоянный или низкочастотный сигнал в высокочастотный, например ШИМ. Для этого 2-хполярное треугольное напряжение, формируемое ГТН сравнивается с измер. напряж. Uвх на компараторе DA1(суммирующий).
Если
измер.
 ,
то на выходеDA1
присутствует сигнал(+) полярности. В
этом случае светодиод оптопары VT1
световым потоком воздействует на VT
и открывает его(по светодиоду протекает
ток). В результате к неинвертирующему
входу компаратора DA2
прикладывается потенциал близкий к
нулю, который меньше потенциала
инвертирующего входа. В результате
состояние компаратора DA2
изменилось и он перешёл в состояние (-)
насыщения.
,
то на выходеDA1
присутствует сигнал(+) полярности. В
этом случае светодиод оптопары VT1
световым потоком воздействует на VT
и открывает его(по светодиоду протекает
ток). В результате к неинвертирующему
входу компаратора DA2
прикладывается потенциал близкий к
нулю, который меньше потенциала
инвертирующего входа. В результате
состояние компаратора DA2
изменилось и он перешёл в состояние (-)
насыщения. 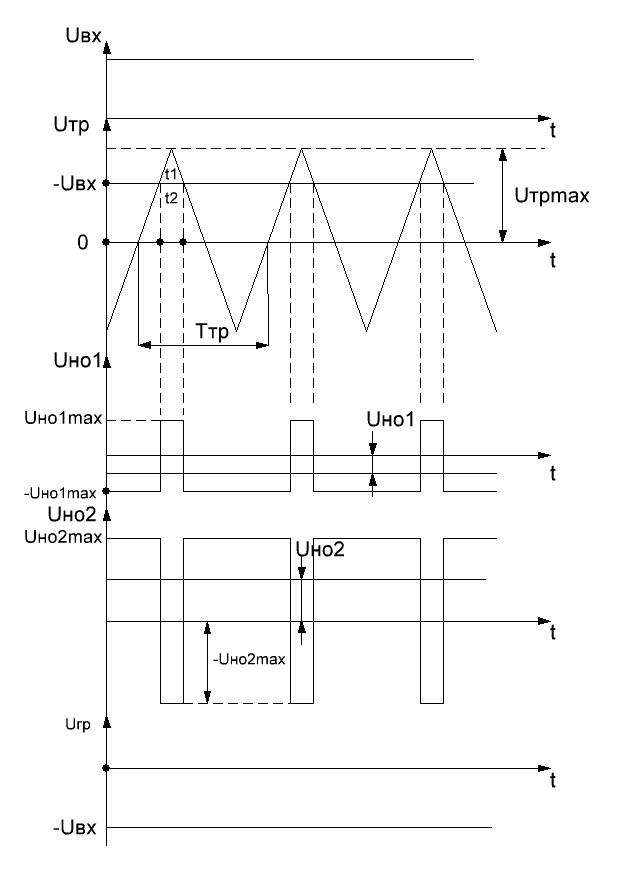
При
 напряжение
становится меньше по величинеUвх,
DA1
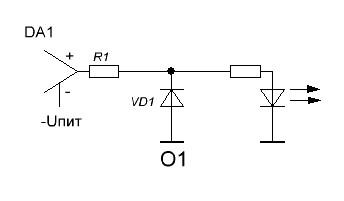
переходит в состояние (-) насыщения.Начал
протекать ток через VD1
и R1
к источнику питания. В результате
светодиод оптопары перестаёт испускать
свет, фототранзистор оптопары закрывается
и к неинвертирующему входу DA2
прикладывается потенциал, превышающий
потенциал инверт. входа и на выходе DA2
появляется напряжение (+) насыщения,
таким
напряжение
становится меньше по величинеUвх,
DA1
переходит в состояние (-) насыщения.Начал
протекать ток через VD1
и R1
к источнику питания. В результате
светодиод оптопары перестаёт испускать
свет, фототранзистор оптопары закрывается
и к неинвертирующему входу DA2
прикладывается потенциал, превышающий
потенциал инверт. входа и на выходе DA2
появляется напряжение (+) насыщения,
таким
образом осуществляется ШИМ входного напряжения Uвх.
Фильтр
нижних частот на DA3
выдел. пост-ую сост-ую Uвых
DA2.
Этот фильтр может служить также и
усилителем сигнала опред. Uср
и коэффициент передачи УГР.

 в
момент сравнения
в
момент сравнения

Выполняется
равенство:
 Опред.
зависимость
Опред.
зависимость








Частота колебаний ГТН выбирается на порядок выше частоты коммутации ключей полупроводникового преобразователя эл. энергии. В настоящее время производятся интегральные микросхемы, реализующие УГР, использующие данный принцип.
46. Устройство аналоговой оптоэлектронной гальванической развязки.

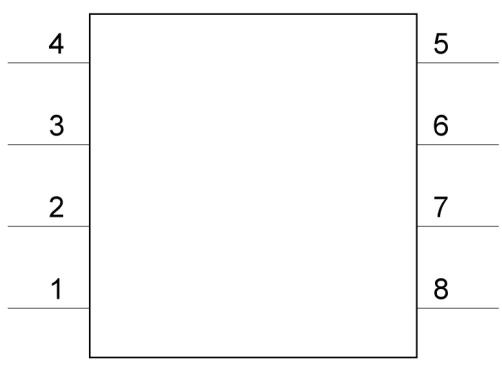
Принцип действия основан на микросхеме содержащей светодиод LED и фотодиод PD1 и PD2, 123456 – выводы микросхемы.
Операционный
усилитель DA1
работает в режиме суммирующего
компаратора, который суммирует токи.





 R2,
R1
– выбираются по своему усмотрению, k1,
k2
– определяются выбранной микросхемой.
R2,
R1
– выбираются по своему усмотрению, k1,
k2
– определяются выбранной микросхемой.
Достоинством данного устройства гальванической развязки является простота, высокая точность, высокое быстродействие. Фотодиод PD1 в данной схеме выполняет роль элемента, который компенсирует за счет включения в обратную связь нелинейность ВАХ фотодиода PD2.
Недостаток: можно измерять одну величину одного направления.
47. Система электропривода "бесконтактный двигатель постоянного тока.
БДПТ
– это система ЭП состоящая из синхронного
двигателя (СД) с трапецеидальным ЭДС
вращения с дискретным датчиком положения
ротора (ДДПР) и инвертором (ВК) формируемый
в фазах двигателя переменный прямоугольный
ток. ВК получает питание от источника
= напряжения. Если источник получает
питание от сети через выпрямитель и
фильтр, то вся силовая схема является
преобразователем частоты (ПЧ). СД с
трапецеидальной ЭДС вращения представляет
собой машину сосредоточенной 3-ех фазной
обмоткой на статоре с трапецеидальным
распределением магнитной индукции в
зазоре машины. ДДПР осуществляет
формирование сигналов для коммутации
фаз двигателя в определенных положениях
ротора.

Для
получения max
момента двигателя при данном токе
необходимо, чтобы на интервале постоянного
значения ЭДС в фазах якоря протекал =
ток. ДДПР формирует сигналы соотв.
постоянному значению ЭДС фаз, необходимые
для открывания соответствующих
транзисторов и формирования = тока в
данной фазе. Для получения max
моментов при данном токе необходимо,
чтобы ток протекал по двум фазам
двигателя, коммутация фаз проходила
через 60 град. и была строго синхронизирована
с ЭДС якоря.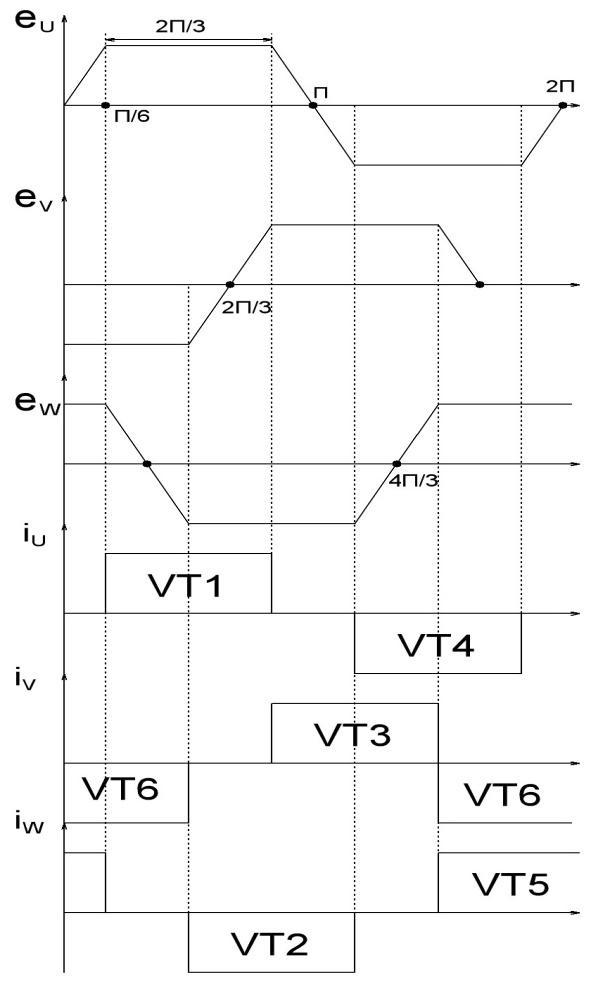

Кривые приведены для случая, когда машина работает генераторном и формирует в фазах трапецеидальное ЭДС. При использовании машины в двигательном режиме управление скоростью и динамическими режимами (пуск, торможение) обеспечивается путем регулирования напряжения. Регулировать напряжение на двигателе можно осуществить с помощью ШИМ напряжения источника питания Uип, точно также как это осуществляется в преобразователе с широтно-импульсным управлением постоянного тока. Т.к схема инвертора содержит 6 транзисторов (а в ПШИУ 4), то в схеме происходит изменение ее структуры (рабочей части) в зависимости от положения ротора (магнитного потока) по сигналу ДДПР. Вследствие того, что изменяется структура и происходит коммутация фаз, в работе схемы выделяют два интервала: 1) межкоммутационный 2) коммутационный. На межкоммутационном интервале ток протекает по двум фазам. На коммутационном интервале ток протекает по 3 фазам.
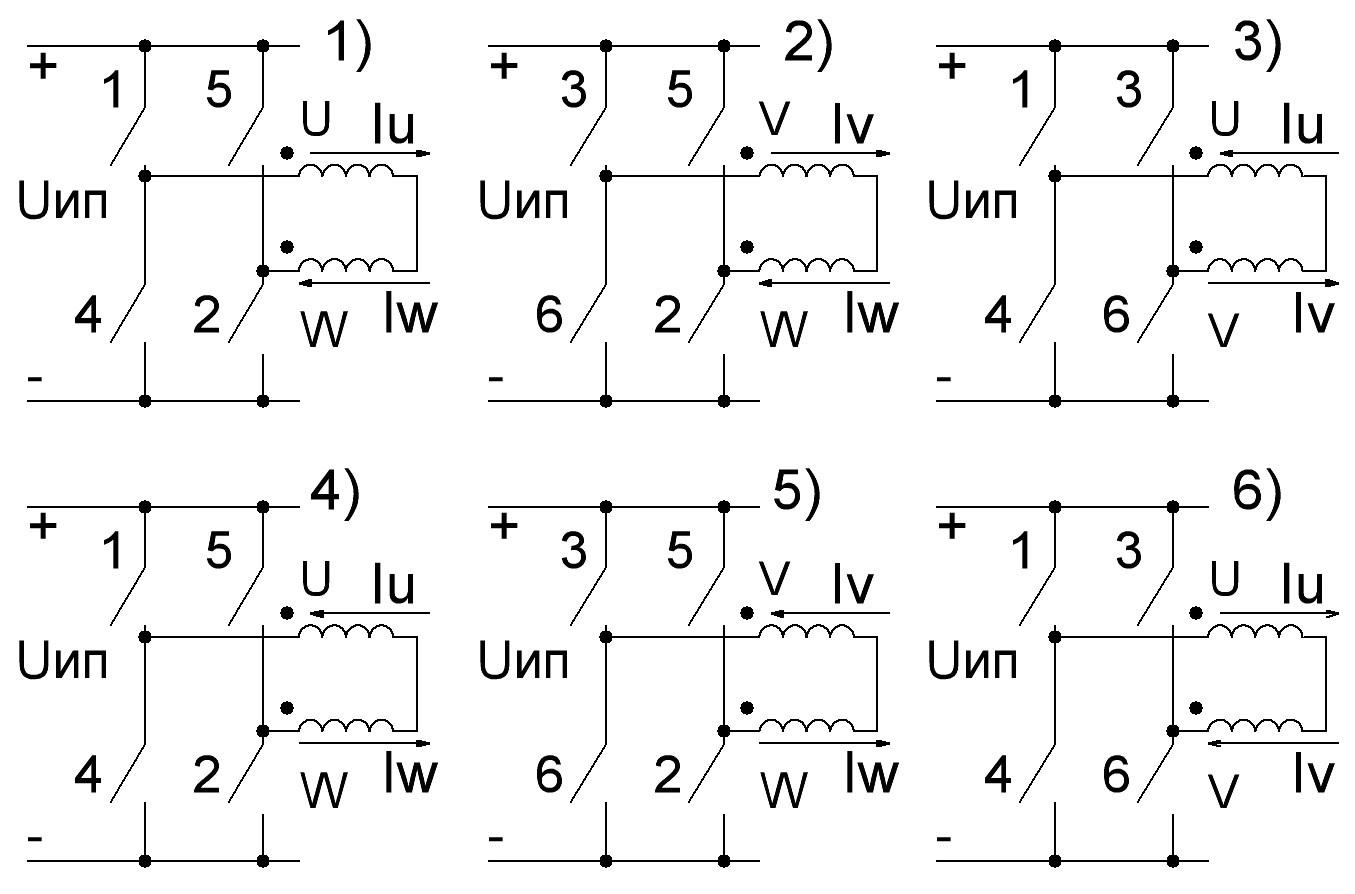
Из приведенных структурных схем очевидно, что на каждом межкоммутационном участке рабочая схема представляет собой однофазный мостовой ПШИУ в одну диагональ которого включены две фазы двигателя, а вторая подключена к Uип. Для регулирования напряжения на двигателе используют аналогичные способы, что и для ПШИУ: симметричная, несимметричная, диагональная.
ДДПР формирует сигналы которые при определенном положении ротора разрешают работу одной из 6 приведенных схем. Работа каждого из транзисторных ключей разрешается на интервале 120* электр. градусов. Т.е. углового положения магнитного поля машины. При использовании любого закона коммутации, ток протекает по транзисторам мостового ПШИУ, который образован 4-мя из 6-ти ключей 3-ех фазного инвертора.