

Пф Kyx(p) в операторной форме отражает способность звена преобразовывать входное воздействие
 .
(1.2)
.
(1.2)
где L – оператор прямого преобразования Лапласа (прил. 1).
 ,
(1.3)
,
(1.3)
есть прямое преобразование Лапласа выходного процесса.
От ПФ в операторной форме
в стационарном
режиме можно перейти к частотной
ПФ (ЧПФ),
заменив оператор p
на переменную i,
где ![]() – мнимая единица.
– мнимая единица.
 .
(1.4)
.
(1.4)
Y(i) – спектральная характеристика выходного процесса, полученная как прямое преобразование Фурье F[y(t)] от временной функции y(t)
 .
(1.5)
.
(1.5)
ЧПФ есть комплексный коэффициент передачи системы по частоте .
Частотные свойства ЧПФ отображают также в виде графика – годографа. Годограф ЧПФ строят либо в полярной, либо в декартовой системе координат. При этом соответственно пользуются экспоненциальной или алгебраической формами записи комплексного числа
![]() .
(1.6)
.
(1.6)
Соответствующий график содержит информацию о модуле – Kyx(ω), фазе – φyx(ω) и циклической частоте ω. Так как каждая его точка соответствует определенной фиксированной частоте, его называют амплитудно-фазово-частотной характеристикой (АФЧХ).
Амплитудно-частотная характеристика (АЧХ) строится по формуле
 ,
(1.7)
,
(1.7)
где Y(ω) и X(ω) – комплексные амплитуды процессов на частоте ω.
Фазово-частотная характеристика (ФЧХ) представляется в виде
 .
(1.8)
.
(1.8)
Графики АЧХ и ФЧХ имеют линейный масштаб по оси абсцисс.
Временные характеристики. T – постоянная времени цепи, которая характеризует быстродействие звена, ее можно определить графически, если провести касательную к кривой h(t) (ПХ) в точке h(0) (рис. 1.1).
Д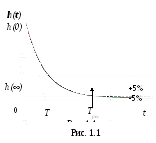 ля
звеньев первого порядка время регулирования
может быть определено какTpег=
(4...5)T
[1].
ля
звеньев первого порядка время регулирования
может быть определено какTpег=
(4...5)T
[1].
При исследовании ПХ динамических звеньев в виде электрических цепей создать единичный скачок напряжения несложно. Для этого, в частности, можно использовать периодическую последовательность прямоугольных импульсов, длительность которых будет существенно больше Tpег звена.
Амплитуда импульсов должна выбираться с таким расчетом, чтобы не нарушились условия линейности звена.
Импульсная характеристика (ИХ) – g(t) определяет поведение процесса на выходе системы при воздействии на ее входе дельта-импульса ((t) – функции Дирака) при нулевых начальных условиях.
 –
(1.9)
–
(1.9)
обратное преобразование Лапласа ПФ K(p); а
 –
(1.10)
–
(1.10)
обратное преобразование Фурье ЧПФ K(i).
ИХ, как и ПХ h(t), АФЧХ, совокупность ЛАЧХ и ЛФЧХ, также позволяет определить все параметры линейного звена.
В условиях эксперимента можно сформировать воздействие (t) лишь приближенно, например использовать короткий импульс, длительность которого много меньше постоянной времени звена (Ти << Т). Рекомендуется выбирать Ти из отношения Ти < Т/(20…50).
Взаимосвязь динамических характеристик
Выходное воздействие можно представить в виде
дифференциального уравнения;
операторного коэффициента передачи (изображение по Лапласу);
комплексного коэффициента передачи (изображение по Фурье);
переходной (ПХ) или импульсной характеристики (ИХ).
ПФ K(p), частотные и временные характеристики линейных звеньев или систем между собой связаны (табл. 1.1).
Таблица 1.1
|
Передаточные функции, временные характеристики |
K(p) |
K(i) |
g(t) |
h(t) |
|
K(p)
|
– |
K(i)|i=p |
|
|
|
K(i)
|
K(p)|p=i |
– |
F[g(t)] |
|
|
g(t) |
|
|
– |
|
|
h(t) |
|
|
|
– |
В силу взаимосвязи этих характеристик вычисление выходной величины может быть выполнено различными способами:

 .
(1.11)
.
(1.11)
Логарифмические частотные характеристики
В инженерной практике часто пользуются логарифмическими эквивалентами АЧХ и ФЧХ: логарифмической амплитудно-частотной характеристикой (ЛАЧХ)
![]() (1.12)
(1.12)
и логарифмической фазово-частотной характеристикой (ЛФЧХ)
![]() .
(1.13)
.
(1.13)
По оси абсцисс значения (или f – Гц) откладываются в логарифмическом масштабе. Основные деления сетки частоты отличаются на декаду (в 10 раз). При этом обычно пересечение осью ординат оси абсцисс выбирают в значении 1 рад/с (1Гц).
В отличие от АЧХ, имеющей линейный масштаб изменения коэффициента передачи, изменение ординаты ЛАЧХ линейно по отношению к приращению функции в дБ.
По оси ординат графиков ФЧХ и ЛФЧХ фаза откладывается в градусах либо в радианах. Масштаб линейный. Отличие их в масштабе по оси абсцисс. В первом случае он линейный, во втором – логарифмический. Таким образом, и ЛЧХ, и ЛФЧХ – полулогарифмические характеристики.
Н а
рисунке 1.2 (графики 1) приведены графики
ЛАЧХ и ЛФЧХ для ЧПФ
а
рисунке 1.2 (графики 1) приведены графики
ЛАЧХ и ЛФЧХ для ЧПФ![]() при k0
=
100 (40 дБ), Т1
=
0,1 с, Т2
=
0,01 с
при k0
=
100 (40 дБ), Т1
=
0,1 с, Т2
=
0,01 с
Экспериментально ЛАЧХ и ЛФЧХ исследуются в установившемся режиме. При этом на вход звена или системы подают гармоническое воздействие с постоянной амплитудой x(t)=X0sin( t), частота изменяется либо дискретно, либо непрерывно, например, по линейному закону. В последнем случае изменения частоты должны быть медленнее наибольшей постоянной времени РАС.
Е
Рис.
1.2
Асимптотические ЛАЧХ и ЛФЧХ. В инженерной практике применяют приближенные эквиваленты ЛАЧХ и ЛФЧХ – асимптотические логарифмические частотные характеристики.
Для построения асимптотической ЛАЧХ динамического звена прежде всего следует выяснить тип звена, определить пределы изменения частоты, коэффициент передачи на постоянном токе и частоты сопряжения.
Пределы изменения частоты достаточно ограничить интервалом
fmin/30 = 1/30Тmax ... 30 fmax = 30/Tmin , (1.14)
где Тmin и Тmax – соответственно, наибольшее и наименьшее значения постоянных времени звена.
Частоты сопряжения находят через постоянные времени звена (j = 1/Тj). ЧПФ необходимо свести к виду (1.15), для этого числитель и знаменатель представляют в виде произведения множителей вида (1 + iТj).
Если такой множитель будет в знаменателе, его асимптотическая ЛАЧХ до частоты сопряжения j имеет постоянную асимптоту ЛАЧХ 0 дБ, после j асимптота линейно убывает со скоростью – 20 дБ/дек (дБ на декаду или – 6 дБ на октаву); а ЛФЧХ до частоты сопряжения j будет примерно равна 0, после j – примерно – 90, на частоте j = – 45.
Если множитель (1 + iТj) окажется в числителе, его асимптотическая ЛАЧХ до частоты сопряжения j будет постоянной на уровне 0 дБ. После j асимптота линейно будет возрастать со скоростью + 20 дБ/дек, а ЛФЧХ до частоты сопряжения j будет примерно равна 0, после j – примерно + 90, на частоте j = + 45.
На рисунке 1.2 (графики 2) построены асимптотические ЛАЧХ и ЛФЧХ. Для их построения необходимо найти частоты сопряжения 1 = 1/Т1 = 10 рад/с, 2 = 1/Т2 = 100 рад/с.
Звено в числителе (форсирующее – классификацию звеньев см. в п. 2.4, а также прил. 2) до частоты 2 имеет постоянную асимптоту ЛАЧХ 0 дБ, а после нее асимптота линейно возрастает со скоростью + 20 дБ/дек.
Звенья в знаменателе: первое (идеальный интегратор) дает асимптоту ЛАЧХ, которая начинается на уровне + 40 дБ (k0) при = 1 и убывает со скоростью – 20 дБ/дек; второе (апериодическое) до частоты 1 имеет постоянную асимптоту ЛАЧХ 0 дБ, а после нее асимптота линейно убывает со скоростью –20 дБ/дек.
После суммирования асимптотических ЛАЧХ звеньев получим итоговую асимптотическую ЛАЧХ (рис. 1.2 график 2).
Максимальная погрешность асимптотической ЛАЧХ получается на частотах сопряжения и не превышает 3 дБ.
Для минимально фазовых цепей достаточна грубая оценка ЛФЧХ. Итоговая асимптотическая ЛФЧХ (рис. 1.2 график 2) получается суммированием ЛФЧХ звеньев: интегрирующее звено имеет постоянный фазовый сдвиг – 90, фаза звена первого порядка изменяется с ростом от 0 до – 90 (апериодическое) или от 0 до + 90 (форсирующее), проходя на частотах сопряжения через значение 45.
Динамическое звено – элемент системы, обладающий свойствами однонаправленности и независимости. Число динамических звеньев структурной схемы определяется удобством математического описания РАС.
На практике ПФ РАС представляет собой произведение передаточных функций динамических звеньев, порядок полинома ПФ которых не выше второго.
K(p)= , (1.15)
, (1.15)
где Т – постоянная времени звена, с; – коэффициент демпфирования (обратная величина добротности) системы; v – количество интеграторов (показатель астатизма системы). В числителе (1.15) собираются множители с опережением по фазе, в знаменателе (1.15) – с отставанием по фазе.
Динамические звенья разделяют на интегрирующие, дифференцирующие и позиционные звенья. Характеристики элементарных звеньев (схема, ПФ, ПХ, ИХ) приведены в приложении 2.
К позиционным звеньям относятся
звенья пропорционального регулирования (ПФ
 );
);
апериодические (ПФ
 ,
<
с1);
,
<
с1);
колебательные (ПФ
 );
);
безынерционные (ПФ K(p) = k0).
К интегрирующим звеньям относятся
идеальные интеграторы (ПФ
 );
);
инерционные интеграторы (ПФ
 );
);
замедляющие (апериодические) (ПФ
 ,
> с1)
и
,
> с1)
и изодромные (ПФ
 )
звенья.
)
звенья.
К дифференцирующим звеньям относятся
идеально дифференцирующие (K(p) = k0p);
дифференцирующие с замедлением (ПФ
 )
и
)
и форсирующие звенья (ПФ K(p) = k0(1+Tp)) .
Для звена с чистым запаздыванием на время : K(p) = e–pτ f(t–τ) .