

Некоторые формулы преобразования Лапласа и z-преобразования
|
f(t) = L-1[X(p)]1(t) |
X(p) = L[f(t)] |
X(z)
( |
|
(t) |
1 |
– |
|
1(t) |
1/p |
|
|
t |
1/p2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f(t) = L-1[X(p)]1(t) |
X(p) = L[f(t)] |
X(z)
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|





































Приложение 2
Основные характеристики типовых динамических звеньев рас
|
ПФ и схема звена |
Переходная характеристика |
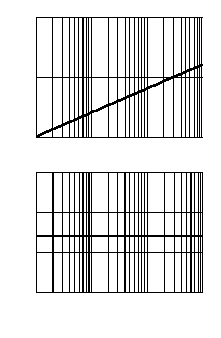
ЛАЧХ и ЛФЧХ |
|
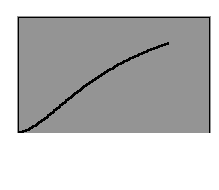
1. Апериодическое звено первого порядка | ||
|
|
|
-20
дБ/дек
ω
-450/дек
|
|
2. Безынерционное звено | ||
|
K(p) = k
|
t h(t) 0 k
|
L() 20lg
k () 0
|
|
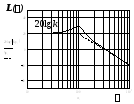
3. Колебательное звено | ||
|
|
t h(t) 0
|
|
|
| ||
|
4. Апериодическое звено второго порядка | ||
|
|
t h(t) 0
|
-20
дБ/дек
-40
дБ/дек
|
|
| ||












|
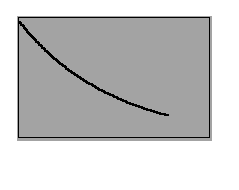
5. Идеальное звено дифференцирующее | ||
|
K(p) = kp
|
t h(t) 0
|
L() () 0 /2
|
|
6. Дифференцирующее звено с замедлением (инерционное дифференцирующее) | ||
|
|
h(t) t 0
|
0
|





|
7. Форсирующее звено | ||
|
K(p) = k(1+Tp) |
t 0 h(t) |
/2
|
|
8. Идеальное звено интегрирующее | ||
|
|
t 0 h(t) |
L() () 0
|





|
9. Изодромное звено | ||
|
|
t 0 h(t) -π 2 |
0
|
|
1 | ||
|
|
t 0 h(t) |
()
- 2
-
|
|
| ||



 0.
Интегрирующее звено с замедлением
(инерционное интегрирующее)
0.
Интегрирующее звено с замедлением
(инерционное интегрирующее)

Приложение 3