

0085730_32E51_mosin_v_g_matematicheskie_osnovy
.pdf6.3. Пример алгоритма интерполяции |
151 |
— для первого координатного полинома и, аналогично, для второго:
b21 |
|
= |
0 |
|
0 |
1 |
0 |
2 |
= |
−5 . |
|||||
|
b20 |
|
|
1 |
|
0 |
0 |
0 |
|
4 |
|
|
|
4 |
|
b22 |
|
|
−2 |
|
2 |
−1 |
−1 |
|
−0 |
|
|
|
1 |
|
|
|
23 |
|
|
3 |
|
3 |
2 |
1 |
|
5 |
|
|
|
4 |
|
|
b |
|
|
− |
|
|
|
− |
|
||||||
|
|
|
|
|
|
|
|
||||||||
Таким образом, интересующая нас параметризация найдена:
q(u) = |
1 + 3 u2 − u3 |
. |
|
4 − 5 · u +· 4 · u2 − u3 |
|
Теперь, придавая параметру u значения от 0 до 1 с шагом 0. 1, мы можем вычислить координаты траектории точки M . Стартовая точка получается при нулевом значении праметра u = 0:
M0 |
= p(0) = |
−1 − 3. 536 · 0 + 13. 072 · 02 − 7. 536 · 03 |
|
= |
−1 |
= A . |
|
|
3 + 3. 536 · 0 − 0. 928 · 02 − 3. 464 · 03 |
|
3 |
|
Следующая точка траектории получается при очередном значении праметра u = 0, 1:
M1 = p(0. 1) =
= |
−1 − 3. 536 · 0. 1 + 13. 072 · 0. 12 − 7. 536 · 0. 13 |
|
= |
−1. 23 . |
|
3 + 3. 536 · 0. 1 − 0. 928 · 0. 12 − 3. 464 · 0. 13 |
|
3. 359 |
Следующая точка траектории получается при очередном значении праметра u = 0, 2:
M2 = p(0. 2) =
= |
−1 − 3. 536 · 0. 2 + 13. 072 · 0. 22 − 7. 536 · 0. 23 |
= |
|
1. 245 . |
|
3 + 3. 536 · 0. 2 − 0. 928 · 0. 22 − 3. 464 · 0. 23 |
|
−3. 717 |
Следующая точка траектории получается при очередном значении праметра u = 0, 3:
M3 = p(0. 3) =
= |
−1 − 3. 536 · 0. 3 + 13. 072 · 0. 32 − 7. 536 · 0. 33 |
= |
|
1. 088 . |
|
3 + 3. 536 · 0. 3 − 0. 928 · 0. 32 − 3. 464 · 0. 33 |
|
−4. 051 |
Следующая точка траектории получается при очередном значении праметра u = 0, 4:
M4 = p(0. 4) =
= |
−1 − 3. 536 · 0. 4 + 13. 072 · 0. 42 − 7. 536 · 0. 43 |
= |
|
0. 805 . |
|
3 + 3. 536 · 0. 4 − 0. 928 · 0. 42 − 3. 464 · 0. 43 |
|
−4. 341 |
Следующая точка траектории получается при очередном значении праметра u = 0, 5:
M5 = p(0. 5) =
|
−1 − 3. 536 · 0. 5 + 13. 072 · 0. 52 − 7. 536 · 0. 53 |
= |
|
0. 442 . |
3 + 3. 536 · 0. 5 − 0. 928 · 0. 52 − 3. 464 · 0. 53 |
|
−4. 576 |
152 |
Глава 6. Интерполяция кривых |
Следующая точка траектории получается при очередном значении праметра u = 0, 6:
M6 = p(0. 6) =
= |
−1 − 3. 536 · 0. 6 + 13. 072 · 0. 62 − 7. 536 · 0. 63 |
= |
|
0. 043 . |
|
3 + 3. 536 · 0. 6 − 0. 928 · 0. 62 − 3. 464 · 0. 63 |
|
−4. 707 |
Следующая точка траектории получается при очередном значении праметра u = 0, 7:
M7 = p(0. 7) =
= |
−1 − 3. 536 · 0. 7 + 13. 072 · 0. 72 − 7. 536 · 0. 73 |
|
= |
0. 345 . |
|
3 + 3. 536 · 0. 7 − 0. 928 · 0. 72 − 3. 464 · 0. 73 |
|
4. 742 |
Следующая точка траектории получается при очередном значении праметра u = 0, 8:
M8 = p(0. 8) =
= |
−1 − 3. 536 · 0. 8 + 13. 072 · 0. 82 − 7. 536 · 0. 83 |
|
= |
0. 679 . |
|
3 + 3. 536 · 0. 8 − 0. 928 · 0. 82 − 3. 464 · 0. 83 |
|
4. 649 |
Следующая точка траектории получается при очередном значении праметра u = 0, 9:
M9 = p(0. 9) =
= |
−1 − 3. 536 · 0. 9 + 13. 072 · 0. 92 − 7. 536 · 0. 93 |
|
= |
0. 912 . |
|
3 + 3. 536 · 0. 9 − 0. 928 · 0. 92 − 3. 464 · 0. 93 |
|
4. 409 |
Следующая точка траектории получается при очередном значении праметра u = 1:
M10 |
= p(1) = |
−1 − 3. 536 · 1 + 13. 072 · 12 − 7. 536 · 13 |
|
= |
1 |
= B . |
|
|
3 + 3. 536 · 1 − 0. 928 · 12 − 3. 464 · 13 |
|
4 |
|
Итак, мы получили точки первого сегмента траектории. Второй сегмент параметризован нами при помощи функции q(u). Очередная точка траектории получается при значении параметра u = 0, 1:
M11 = q(0. 1) = |
1 + 3 0. 12 |
0. 13 |
= |
1. 029 |
. |
4 − 5 · 0. 1·+ 4 · 0−. 12 − 0. 13 |
3. 359 |
||||
Следующая точка траектории получается при очередном значении праметра u = 0, 2:
M12 = q(0. 2) = |
1 + 3 0. 22 |
0. 23 |
= |
1. 112 |
. |
4 − 5 · 0. 2·+ 4 · 0−. 22 − 0. 23 |
3. 152 |
||||
Следующая точка траектории получается при очередном значении праметра u = 0, 3:
M13 = q(0. 3) = |
1 + 3 0. 32 |
0. 33 |
= |
1. 243 |
. |
4 − 5 · 0. 3·+ 4 · 0−. 32 − 0. 33 |
2. 833 |
||||
6.3. Пример алгоритма интерполяции |
153 |
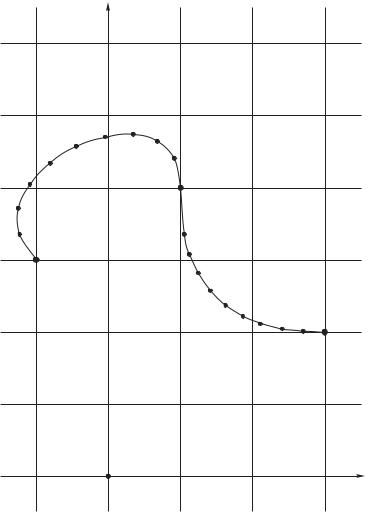
y
B
A
C
0 |
x |
Рис. 6.5: Два сегмента кривой, гладко сопряженные в точке B.
Следующая точка траектории получается при очередном значении праметра u = 0, 4:
M14 = q(0. 4) = |
1 + 3 0. 42 |
0. 43 |
= |
1. 416 |
. |
4 − 5 · 0. 4·+ 4 · 0−. 42 − 0. 43 |
2. 576 |
||||
Следующая точка траектории получается при очередном значении праметра u = 0, 5:
M15 = q(0. 5) = |
1 + 3 0. 52 |
0. 53 |
= |
1. 625 |
. |
4 − 5 · 0. 5·+ 4 · 0−. 52 − 0. 53 |
2. 375 |
||||
Следующая точка траектории получается при очередном значении праметра u = 0, 6:
M16 = q(0. 6) = |
1 + 3 0. 62 |
0. 63 |
= |
1. 864 |
. |
4 − 5 · 0. 6·+ 4 · 0−. 62 − 0. 63 |
2. 224 |
||||
154 Глава 6. Интерполяция кривых
Следующая точка траектории получается при очередном значении праметра u = 0, 7:
M17 = q(0. 7) = |
1 + 3 0. 72 |
0. 73 |
= |
2. 127 |
. |
4 − 5 · 0. 7·+ 4 · 0−. 72 − 0. 73 |
2. 117 |
||||
Следующая точка траектории получается при очередном значении праметра u = 0, 8:
M18 = q(0. 8) = |
1 + 3 0. 82 |
0. 83 |
= |
2. 408 |
. |
4 − 5 · 0. 8·+ 4 · 0−. 82 − 0. 83 |
2. 048 |
||||
Следующая точка траектории получается при очередном значении праметра u = 0, 9:
M19 = q(0. 9) = |
1 + 3 0. 92 |
0. 93 |
= |
2. 701 |
. |
4 − 5 · 0. 9·+ 4 · 0−. 92 − 0. 93 |
2. 011 |
||||
Следующая точка траектории получается при очередном значении праметра u = 1:
M20 |
= q(1) = |
1 + 3 · 12 − 13 |
= |
3 |
= C . |
|
|
4 − 5 · 1 + 4 · 12 − 13 |
|
2 |
|
Понятно, что с точки зрения современного процессора совершенно безразлично, какое именно количество точек требуется изобразить на кривой: двадцать , как в нашем примере, или несколько тысяч. Тем самым, достигается возможность построить визуально гладкую кривую за счет достаточно длинного цикла вычислений (см. рис. 6.5, стр. 153).
Часть III
Приложения
155

Приложение A
Определители, матрицы и линейные системы
Вычислительная техника линейной алгебры базируется на элементарных преобразованиях строк (реже — столбцов) матриц, определителей или линейных систем. Элементарные преобразования, сведенные в единую лаконичную систему действий, именуются методом Гаусса решения той или иной задачи.
Врамках этого раздела, посвященного определителям, матрицам и линейным системам, при помощи метода Гаусса мы будем вычислять: определители (см. раздел A.1.2, стр. 159), обратные матрицы (см. раздел A.2.2, стр. 167) и решения линейных систем (см. раздел A.3.2, стр. 177). И хотя, в приложении к каждому из этих трех типов задач, метод Гаусса обладает своей спецификой, отличия эти незначительны и носят скорее косметический характер.
Влюбом случае, метод Гаусса — это вычислительный фундамент линейной алгебры.
A.1 Определители
Матрицы, с изучения которых мы начинаем курс линейной алгебры (см. главу 2, стр. 17), обладают несколькими числовыми характеристиками1, одной из которых является ее определитель.
A.1.1 Определители второго и третьего порядков
Подробное изложение теории определителей выходит за рамки нашего крса, однако техника их вычисления лежит в основе очень многих алгебраических задач. В этом разделе мы рассмотрим простейшие ситуации (определители 2-го и 3-го порядков) и подробно разберем вычислительные примеры.
1Так же, как например, векторы: вектор, описаный в координатах — это набор чисел,
аего длина — число, причем, положительное. Длина вектора — это одна из его числовых характеристик.
157

158 |
Приложение A. Определители, матрицы и линейные системы |
Определение 66 (определители 2-го порядка) Пусть имеется матрица A из полной матричной алгебры 2-го порядка: A Matr 2. Ее определителем называется число, вычисляемое по следующей формуле:
a b
= ad − bc.
c d
Определитель матрицы обозначается |A| или det A (от латинского слова determinant).
2 5
Пример 95 = 2 · 3 − 5 · 4 = −14.
4 3
|
|
1 |
3 |
|
|
|
|
|
Пример 96 |
|
2 |
−5 |
|
= 1 · 5 − (−3) · 2 = 11. |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример 97 |
|
cos α |
|
sin α |
= cos2 α + sin2 |
|
||
|
sin α |
−cos α |
|
α = 1. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ничего сложного. Поэтому перейдем к определителям третьего порядка. Здесь вычислительная сложность возрастет.
Определение 67 (определители 3-го порядка) Пусть имеется матрица A из полной матричной алгебры 3-го порядка: A Matr 3. Ее определителем называется число, вычисляемое по следующей формуле:
|
a11 |
a12 |
a13 |
= |
|
a13a22a31 |
|
a11a23a32 |
|
a12a21a33 . |
a21 |
a22 |
a23 |
|
|
|
|||||
|
31 |
32 |
33 |
|
− |
a11a22a33 |
+ a12a23a31 |
+ a13a21a32 |
||
|
− |
|
− |
|
||||||
|
a |
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так же, как и в случае матриц 2 × 2, определитель матрицы третьего порядка обозначается |A| или det A.
Прокомментирем формулу. Это – сумма, состоящая из шести слагаемых, причем часть из них входит в формулу со знаком “плюс”, а часть — со знаком “минус” (другими словами, имеются две серии слагаемых: положительная и отрицательная). Каждое слагаемое — это произведение трех множителей, у которых первые индексы следуют по порядку, а вторые — перемешаны всеми возможными способами.
Для запоминания этой формулы применяют мнемоническое правило, называемое правилом треугольников (или правилом Саррюса2).
+К положительной серии слагаемых относятся: произведение элементов главной диагонали и произведения матричных элементов, расположенных в вершинах треугольников с основаниями, параллельными главной диагонали.
−К отрицательной серии слагаемых относятся: произведение элементов побочной диагонали и произведения матричных элементов, расположенных в вершинах треугольников с основаниями, параллельными побочной диагонали.
2Математик, который придумал это правило и больше, кажется, ничем не прославил-
ся.

A.1. Определители |
159 |
Пример 98 Применяя правило Саррюса, вычислим определитель третьего порядка:
|
1 |
3 |
2 |
|
|
|
1 · 1 · 5 3 · 2 · 1 (−2) · 0 · 4− |
= |
|||||||
|
2 0 |
−1 |
|
= |
|||||||||||
4 |
5 |
1 |
|
|
1 0 1 + 3 1 4 + ( 2) 2 5 |
|
|||||||||
|
|
|
|
|
|
− · · − · · − − · · |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
12 |
− |
20 |
− |
5 |
− |
6 = |
− |
19. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Пример 99 Рассмотрим еще один числовой пример:
|
−1 1 4 |
|
= |
|
(−3) · 4 · 1 1 · 1 · 1 2 · 1 · 2− |
= |
||||
2 1 1 |
|
|
( 3) 1 1 + 1 |
|
4 2 + 2 1 1 |
|
||||
|
3 1 2 |
|
|
|
|
|
||||
|
|
|
− − · · − · · − · · |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
− |
3 + 8 + 2 + 12 |
− |
1 |
− |
4 = 14. |
|
|
|
|
|
|
|
|
|
|||
Пример 100 Элементами определителя могут быть не только числа, но и функциональные выражения, зависящие от переменных. Как, например, здесь:
|
α2 + 1 |
αβ |
αγ |
|
|
αβ |
β2 + 1 |
βγ |
= |
||
|
αγ |
βγ |
γ2 + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=(α2 + 1)(β2 + 1)(γ2 + 1) + α2β2γ2 + α2β2γ2 − (α2 + 1)β2γ2−
−(γ2 + 1)α2β2 − (β2 + 1)α2γ2 =
=α2β2γ2 + α2γ2 + β2γ2 + γ2 + α2β2 + α2 + β2 + 1−
−α2β2γ2 − β2γ2 − α2β2 − α2γ2 =
=α2 + β2 + γ2 + 1 .
Все получается после раскрытия скобок и приведения подобных членов.
Вычисление определителя по определению — это не самый удобный метод вычисления определителей. Имеются методы, альтернативные ему, их мы рассмотрим в следующем разделе.
A.1.2 Свойства определителей
Метод Гаусса, состоящий в элементарных преобразованиях строк или столбцов определителя3, основан на его свойствах. Мы сформулируем их в виде следующей теоремы.
Теорема 85 (свойства определителя) Определитель любой матрицы обладает следующими свойствами:
1.|AT | = |A| — то есть определитель матрицы не изменяется при ее транспонировании4.
3Напомним, что метод Гаусса применяется не только для вычисления определителей, но также для вычисления обратных матриц и для решения линейных систем.
4Транспонированием называется матричная операция, при которой строки и столбцы матрицы меняются ролями: первая строка становится первым столбцом, вторая — вторым столбцом и т.д. Это свойство означает, в частности, что все свойства определителя, верные для его строк, верны также и для столбцов. Все дальнейшие свойства определителя мы сформулируем именно для строк, подразумевая, что аналогичные свойства имеются и для столбцов.

160Приложение A. Определители, матрицы и линейные системы
2.Определитель верхней (или нижней) треугольной матрицы равен произведению элементов ее главной диагонали.
3.Если в определителе поменять местами две строки, то определитель сменит знак.
4.Общий множитель строки можно выносить из-под знака определителя.
5.Определитель не изменится, если к одной его строке прибавить другую, домноженную на число5.
6.Определитель, содержащий нулевую строку, равен нулю.
7.Определитель, содержащий две одинаковые строки, равен нулю.
8.Определитель, содержащий две пропорциональные строки, равен нулю.
При помощи свойств определителя его можно преобразовать к верхнему (или нижнему — как удобно) треугольному виду, после чего — воспользоваться тем фактом, что определитель треугольной матрицы равен произведению элементов ее главной диагонали. В этом состоит метод Гаусса вычисления определителей.
Пример 101 |
|
−1 |
|
−I 2 |
= |
|
|
|
|
−5 |
|
|
|
|
|
|
|
|
|
−5 |
|
← III = |
||||||||||||
|
|
|
|
|
2 |
2 |
0 |
|
2 |
= |
3 |
0 |
|
2 |
|
|||||||||||||||||||
|
|
|
|
|
1 |
0 |
|
2 |
|
+I |
|
|
1 |
|
0 |
2 |
|
|
|
|
1 |
|
0 |
|
|
2 |
|
|
|
II |
||||
|
|
|
|
1 |
3 |
|
2 |
|
0 |
|
3 |
0 |
|
|
0 |
|
1 |
|
|
0 |
|
|
||||||||||||
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
← |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
2 |
|
|
|
|
|
|
|
1 |
0 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
− |
3 |
|
0 |
|
1 |
−0 |
|
II 2 |
= |
− |
3 |
0 |
1 |
−0 |
= |
− |
3 |
· |
(1 |
· |
1 |
· |
5) = |
− |
15. |
||||||||
|
|
|
0 |
|
2 |
5 |
|
|
|
|
|
0 |
0 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Прокомментируем выкладу. Итак, нашей целью является построение нулей на всех местах матрицы, расположенных ниже главной диагонали (тогда матрица приобретет верхний треугольный вид).
На первом шаге мы от второй строки определителя отнимаем первую строку, домножив ее на 2, и к третьей строке прибавляем первую же. Отметим, что при этом первая строка остается без изменения, а вторая и третья строки — преобразуются. После этих действий на первых местах во второй и в третьей строках появляются нулевые элементы.
На втором шаге мы из третьей строки выносим 3 за знак определителя как общий множитель строки.
На третьем шаге мы меняем местами вторую и третью строки. При этом определитель меняет знак.
На четвертом шаге мы отнимаем от третьей строки вторую, домножив ее на 2, для того, чтобы получить еще один 0 ниже главной диагонали. Отметим еще раз: при этом действии вторая строка не изменяется, преобразуется только третья строка.
После этого определитель приобретает верхний треугольный вид и вычисляется уже очень легко: произведением элементов главной диагонали.
5В более общем случае — определитель не изменится, если к его строке прибавить любую линейную комбинацию других строк.