

5.6. Определение показателей износостойкости сцепления
Минимально возможная работа буксования сцепления в Н×м определяется по формуле:
 (5.16)
(5.16)
где: ne = 600-800 об/мин - частота вращения коленвала перед включением сцепления;
Ja - момент инерции автомобиля, приведенный к валу сцепления на 1 передаче КПП
![]()
где: ma - масса автомобиля, кг;
rк - радиус колеса, м;
uк ,uг - передаточное число КПП и главной передачи;
Je - момент инерции вращающихся частей двигателя, кг×м2.
Выбирается приближенно с учетом Je существующих конструкций автомобилей (табл.1.2).
Таблица 5.2
|
Тип автомобиля
|
М-412 |
ГАЗ-24 |
ЗИЛ-114 |
ГАЗ-53 |
ЗИЛ-130 |
МАЗ-500 |
|
Je, кг×м2 |
0,19 |
0,43 |
0,72 |
0,51 |
1,3 |
3,1 |
Удельная работа буксования в Н×м/см2 определяется по формуле:
![]() (5.17)
(5.17)
Приращение температуры деталей сцепления при трогании автомобиля с места, без учета теплоотдачи в окружающую среду,
![]() (5.18)
(5.18)
где: g - доля работы буксования, приходящаяся на нагреваемую деталь;
с - теплоемкость детали ( 0,115 ккал/(кг×град));
Gд - масса детали, кг.
Для нажимного диска однодискового сцепления g = 0.5; для нажимного диска двухдискового сцепления g = 0,25 и для среднего диска g = 0,5.
5.7. Расчет деталей привода сцепления
Расчет привода включения сцепления состоит в правильном подборе соотношения плеч рычагов привода для обеспечения легкости и удобства управления.
Общее передаточное число привода определяется по формуле:
![]() (5.19)
(5.19)
где: Рп - усилие на педаль (принимается 120-150 Н);
hпр - 0,85-0,95 - КПД привода.
 а) б)
а) б)
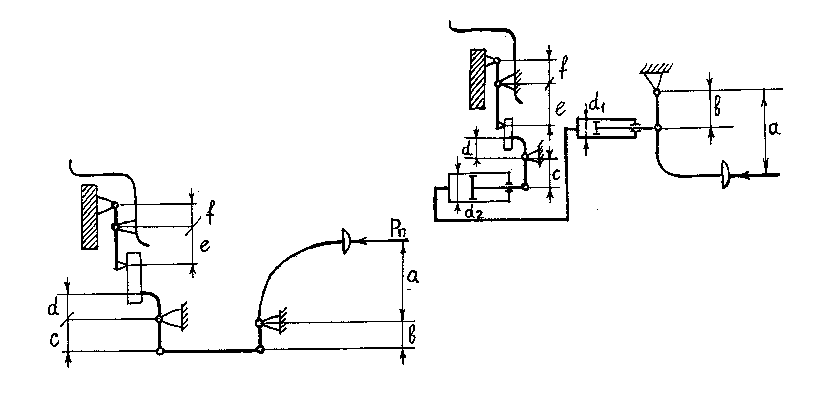
Рис.5.2 Кинематическая схема привода сцепления
В механическом приводе (рис.5.2,а)
![]() (5.20)
(5.20)
В гидравлическом приводе (рис.5.2,б)
![]() (5.21)
(5.21)
6. Рулевое управление
6.1. Рулевой привод
Рулевой привод должен обеспечивать при движении на повороте качение управляемых колес без бокового скольжения. При этом управляемые колеса должны быть повернуты на разные углы, значения которых (без учета угла бокового увода шин) связаны зависимостью:
![]() ,
(6.1)
,
(6.1)
где:
![]() и
и ![]() -
углы поворота соответственно наружного
и внутреннего колес;
-
углы поворота соответственно наружного
и внутреннего колес;
M - расстояние между шкворнями;
L - база автомобиля.
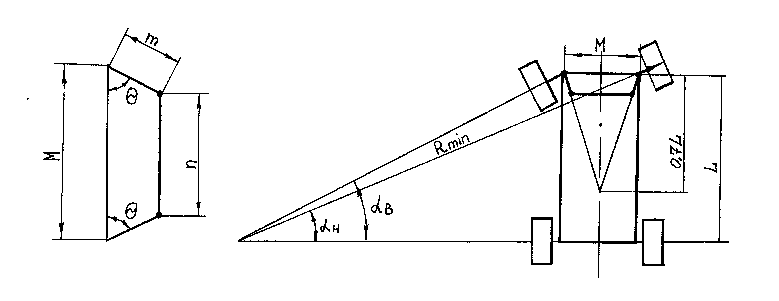
Рис. 6.1 Схема рулевой трапеции и схема поворота автомобиля
Рядом
с теоретической кривой следует построить
действительную кривую ![]() ,
которая может быть рассчитана графически.
Для этого, пользуясь чертежом рулевого
привода, трапецию изображают на бумаге
в определенном масштабе и определяют
значения
,
которая может быть рассчитана графически.
Для этого, пользуясь чертежом рулевого
привода, трапецию изображают на бумаге
в определенном масштабе и определяют
значения ![]() и
и ![]() для 6-7 положений управляемых колес от
для 6-7 положений управляемых колес от
![]() =
00
до
=
00
до ![]() =
max по технической характеристике.
=
max по технической характеристике.
Кинематическое
![]() и силовое
и силовое ![]() передаточные числа рулевого управления
определяются:
передаточные числа рулевого управления
определяются:
![]() (6.2)
(6.2)
где: aрк и aук - углы поворота соответственно рулевого и управляемых колес;
Р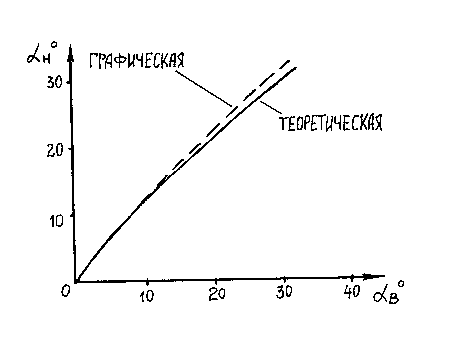 ис.
6.2 Зависимость между углами поворота
наружного
ис.
6.2 Зависимость между углами поворота
наружного![]() и внутреннего
и внутреннего ![]() колес автомобиля
колес автомобиля
Uwрм и Uwрп - угловые передаточные числа соответственно рулевого механизма и рулевого привода.
Значение
aук
находится в пределах 40-45°, а ![]() = 540-1080°.
= 540-1080°.
![]()
 (6.3)
(6.3)
где: Uрм и Uрп - кинематическое и силовое передаточные числа рулевого механизма и рулевого привода соответственно;
Rрк
- радиус рулевого колеса, Rрк
= 0,2-0,25 м;![]()
![]() -
момент сопротивления повороту
управляемых колес;
-
момент сопротивления повороту
управляемых колес;
G1 -сила тяжести, приходящаяся на передние управляемые колеса;
f- коэффициент сопротивления качению; с - плечо поворота управляемых колес;
с = 20-60 мм у легковых автомобилей;
с = 60-100 мм у грузовых автомобилей;
j - коэффициент сцепления шины с полотном дороги;
j= 0,8-0,9;
rj - радиус (плечо) скольжения;
![]()
где:
![]() rc-
статический радиус колеса;
rc-
статический радиус колеса;
Mрк - момент, прикладываемый к рулевому колесу,
![]() (6.4)
(6.4)
Ррк - усилие, прикладываемое водителем к рулевому колесу.
![]() (6.5)
(6.5)
где hрм - КПД (прямой) рулевого механизма, hрм = 0,85-0,9;
hрп - КПД рулевого привода, hрп = 0,85-0,95.
Если Ррк > 250 Н, то необходим усилитель.
Расчет деталей рулевого управления на прочность следует производить, исходя из условного расчетного усилия, прикладываемого к рулевому колесу: Ррк = 400 Н для легковых автомобилей и 700 Н - для грузовых автомобилей.