

Теоретичні відомості
Кран-тренажер є діючою моделлю баштового крана КБ-403А. Його обладнано робочим місцем кранівника та кнопковим пультом дистанційного керування. Лінійні розміри моделі виконані у масштабі 1:10 до оригіналу. Технічні характеристики крана й тренажера наведені у таблиці 9.1.
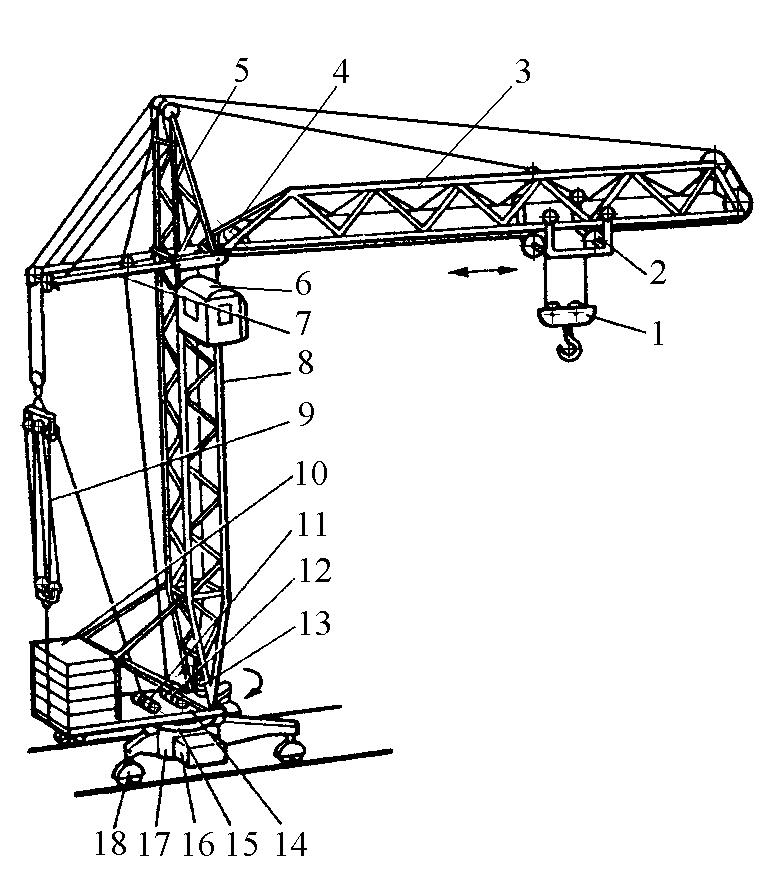
Баштовий кран, як і тренажер, складається з двох частин – поворотної та неповоротної, що з’єднані між собою опорно-поворотним пристроєм (рис. 9.1). Поворотна частина крана включає башту, кабіну, гакову підвіску, стрілу, стріловий поліспаст, стрілову лебідку, вантажну лебідку, механізм повороту, шафу з електрообладнанням, поворотну платформу, контрвантаж, вантажний візок, візкову лебідку, вантажний поліспаст.
Рисунок 9.1 –
Схема баштового крана
КБ - 403 А: 1
– гакова підвіска; 2 – вантажний візок;
3 – стріла; 4 – візкова лебідка; 5 –
оголовок; 6 – кабіна; 7 – розпірка; 8 –
башта; 9 – стріловий поліспаст ; 10
–контрвантаж; 11– стрілова лебідка; 12
– вантажна лебідка; 13– механізм
повороту; 14 – поворотна платформа; 15 –
опорно-поворотний пристрій; 16 – баласт;
17 – центральна неповоротна рама; 18 –
ходовий візок
Кран обладнаний двома системами зміни вильоту – основною та додатковою. При основній системі зміна вильоту крана відбувається за допомогою вантажного візка, що переміщується по стрілі візковою лебідкою. В додатковій системі зміна вильоту проводиться нахилом стріли до горизонту за допомогою стрілової лебідки.
На баштовому крані встановлені такі виконавчі механізми: підйому вантажу (вантажна лебідка, вантажний поліспаст та гакова підвіска), підйому стріли (стрілова лебідка та стріловий поліспаст), механізм зміни вильоту (візкова лебідка з тяговим канатом і вантажним візком), механізм повороту й механізм пересування крана у вигляді привідних балансирних візків. Усі вказані механізми уніфіковані.
У механізмах крана застосовані уніфіковані лебідки типів Л-450, Л-500 та Л-600 (тут індекс Л – лебідка, а цифри – міжцентрова відстань редуктора). У лебідці підйому вантажу (рис. 9.2,а) вал електродвигуна 3 з’єднаний із первинним валом редуктора 5 за допомогою зубчастої муфти 2. Крім цього, на валу електродвигуна 3 встановлене колодкове гальмо 4, а на первинному валу редуктора 5 – гальмівний генератор 1. Вихідний вал редуктора 5 з’єднано з барабаном 6.
 Візкова
лебідка (рис. 9.2,б) складається з привода
та барабана з опорною стійкою. Як привід
застосовано уніфікований агрегат МТРГУ
(двигун, гальмо, редуктор черв’ячний
глобоїдний – усе в одному блоці).
Візкова
лебідка (рис. 9.2,б) складається з привода
та барабана з опорною стійкою. Як привід
застосовано уніфікований агрегат МТРГУ
(двигун, гальмо, редуктор черв’ячний
глобоїдний – усе в одному блоці).
 Рисунок
9.2 – Кінематичні схеми лебідок баштового
крана:
Рисунок
9.2 – Кінематичні схеми лебідок баштового
крана:
а) вантажної; б) візкової
Привідні візки механізму пересування крана оснащено уніфікованим агрегатом МТРГУ чи ПК-5 та відкритою циліндричною зубчастою передачею (рис.9.3).
Р исунок
9.3 – Кінематична схема привідного
ходового візка
исунок
9.3 – Кінематична схема привідного
ходового візка
Механізм повороту (рис. 9.4) складається з вертикально розташованого кранового електродвигуна, колодкового гальма, уніфікованого редуктора та відкритої зубчастої пари (вихідна шестірня редуктора і зубчастий вінець кулькового чи роликового опорно-поворотного круга). У механізмі повороту застосовують трьохступінчасті редуктори двох типів: планетарний із передавальним числом ір=258 (рис. 9.4,а) або циліндричний із передавальним числом ір=220 (рис.9.4,б) .
Принцип дії виконавчих механізмів, а також схеми запасовки вантажного, тягового та стрілового поліспастів вивчаються на тренажері.
Р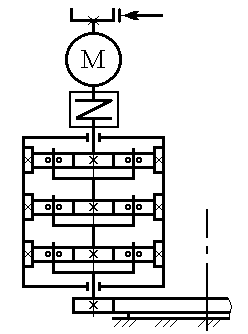
 исунок
9.4 – Кінематичні схеми механізмів
повороту:
а) з планетарним
редуктором; б) із циліндричним редуктором
исунок
9.4 – Кінематичні схеми механізмів
повороту:
а) з планетарним
редуктором; б) із циліндричним редуктором
Керування баштовим краном здійснюється двома способами: з кабіни керування і при монтажі крана за допомогою виносного кнопкового пульта (рис. 9.5).
Робоче місце машиніста (рис. 9.5, а) являє собою основу 8, на якій змонтовані сидіння кранівника 3, рукоятки ввімкнення механізмів пересування крана 1, повороту 2, підйому вантажу 4, пересування вантажного візка 6. По лівий бік від машиніста розташовано вмонтований пульт 5 із тумблерами: «Мережа 220 В», «Аварійний вимикач», «Лінійний контактор», а внизу - педаль звукового сигналу 7 та педаль пригальмовування поворотного руху 6.
 Рисунок
9.5 – Керування краном:
а) схема
робочого місця машиніста; б) схема
виносного пульта дистанційного керування
Рисунок
9.5 – Керування краном:
а) схема
робочого місця машиніста; б) схема
виносного пульта дистанційного керування
На виносному пульті дистанційного керування машиніста (рис. 9.5, б) розташовані кнопки:
1, 2 – прискореного підйому й опускання вантажу;
3, 4 – підйому та опускання вантажу;
5, 6 – повороту вправо і вліво;
7, 8 – пересування крана вперед та назад;
9, 10 – підйому й опускання стріли;
11, 12 – пересування вантажного візка вздовж стріли вперед та назад.
.