

Лабораторна робота № 6 автонавантажувач
Мета роботи: ознайомитися з призначенням, будовою, принципом роботи та керуванням автонавантажувача; розрахувати продуктивність авто-навантажувача в конкретних виробничих умовах.
Обладнання:універсальний гідравлічний автонавантажувач 4045.
Теоретичні відомості
Автонавантажувач (рисунок 6.1) складається з ходової і підіймальної частин. У ходову частину входять стандартні автомобільні деталі й вузли: двигун із коробкою передач, ходові передні та задні колеса, кермове керування тощо.
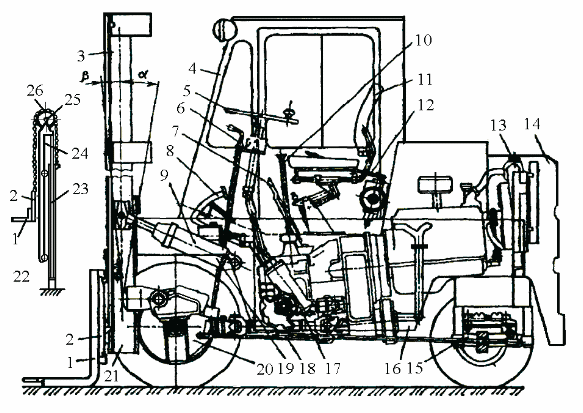
Рисунок 6.1 – Автонавантажувач:
1 – вантажні вила; 2 – піднімальна каретка; 3 – основна рама вантажопідйомника; 4 – кабіна; 5 – рульове керування; б – важіль керування механізмом зворотного коду; 7 – важіль стоянкового гальма; 8 – педаль гальмування; 9 – гідроциліндр нахилу вантажопідйомника; 10 – важіль перемикання передач; 11 – сидіння; 12 – важіль гідроштовхача; 13 – двигун; 14–противага; 15 – задня підвіска; 16 – рама; 17 – гідропідсилювач кермового керування; 18 – поздовжня кермова тяга; 19 – гідроциліндр нахилу; 20 – передній ведучий міст; 21 – основна вертикальна рама; 22 – гідравлічний штовхач; 23 – шток гідроштовхача; 24 – телескопічна рама; 25 – зірочки; 26 – вантажний ланцюг
На відміну від звичайних автомобілів в автонавантажувачах двигун і керовані колеса встановлені позаду, а задній ведучий міст із подвоєними пневматичними колесами – попереду ; це пояснюється тим, що передня частина автонавантажувача завантажена значно більше. Керовані задні колеса повертаються кермовою трапецією, маятниковий важіль якої переміщується кермовою тягою, пов'язаною з гідроциліндром та гідропідсилювачем кермового колеса. Керування гідроциліндром гідропідсилювача здійснюється за допомогою золотникового розподільника, розташованого на циліндрі, плунжери якого переміщуються сошкою рульового керування. Ходова частина автонавантажувача, як правило, непідресорена.
Піднімальна частина автонавантажувача складається із шарнірно приєднаної до рами автонавантажувача основної вертикальної рами 21 і телескопічної рами 24, по якій у свою чергу переміщується каретка 2. Рама 24 збільшує можливість висоти підйому каретки 2 при малій загальній висоті рам у складеному стані. Для зменшення консольного вильоту вантажних вил захоплення при пересуванні основна рама 3 може нахилятися назад на кут до 10°; для кращого захоплення вантажу вона може нахилятися також уперед на кут до 3°.
Робочим приводом механізмів підйому і нахилу є поршневі гідроциліндри, у які рідина подається від шестеренчастого насоса, що приводиться через карданний вал від двигуна автонавантажувача. У піднімальному механізмі на нижній балці основної вертикальної рами 3 установлений гідроциліндр 22, шток 23 котрого закінчується поперечиною, що підтримує зірочки 25 для пластинчастих вантажних ланцюгів 26. Поперечина зв'язана з телескопічною рамою 24. Вантажний ланцюг, один кінець якого закріплений на основній рамі 3, а другий – закріплений на каретці 2, перекинутий через зірочку. При переміщенні штока телескопічна рама переміщається разом із ним, а каретка рухається з подвоєною швидкістю відносно основної рами 3 і проходить шлях, рівний подвоєному ходу штока гідроциліндра.
Механізм нахилу приводиться гідроциліндром 9, що передає через шток зусилля на основну раму вантажопідйомника. Міняючи точку кріплення штока до рами, можна одержувати різні кути відхилення основної вертикальної рами. Циліндри управляються золотниковими розподільниками.
Автонавантажувач із метою підвищення ефективності його застосування може бути обладнаний різноманітним вантажозахватним пристосуванням: вилами, ківшем, безблоковою стрілою тощо.