

Синтез систем керування еп эшим1 і эпб2
Структурною
особливістю ЕП ЭШИМ1 і ЭПБ2 є наявність
релейно – тимчасового регулятора в
контурі струму. Значення електромагнітних
постійних часу
![]() не перевищують 0,01 з, а смуга пропущення
обмежена 100Та. Тому для інженерних
розрахунків контур струму представляється
пропорційною ланкою з коэф. передачі
1/КТ
. Тоді повна структурна схема
не перевищують 0,01 з, а смуга пропущення
обмежена 100Та. Тому для інженерних
розрахунків контур струму представляється
пропорційною ланкою з коэф. передачі
1/КТ
. Тоді повна структурна схема

ЕП має вигляд:
ЕП з таким швидкоодіючим контуром струму буде відпрацьовувати й різні перешкоди (пульсації
BR). Тому в обох типах ЕП передбачена “зонна корекція РШ”.
У зоні малих значень швидкості О-(0,25-0,3)
 параметри
параметри і
і повинні бути такими, щоб забезпечити
максимальну полосу пропускання частот.
повинні бути такими, щоб забезпечити
максимальну полосу пропускання частот.У зоні середніх та великих швидкостей (0,25-0,3)
 —
параметри повинні бути змінені, для
того щоб полоса стала меньша.
—
параметри повинні бути змінені, для
того щоб полоса стала меньша.
“Зонна корекція” параметрів РШ здійснюється за допомогою рогового елемента і контакта реле К (рис.13.3).
П
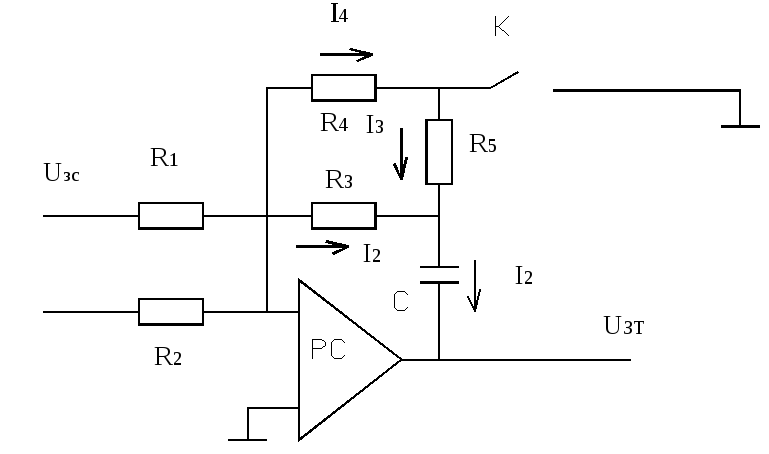
Рис.13.3. Схема вузла “зонної корекції”
ри швидкості контакт К замкнутий для показаних на
схемі напрямків струмів можна написати
такі рівняння:
контакт К замкнутий для показаних на
схемі напрямків струмів можна написати
такі рівняння:
![]()
![]() .
.
Передавальна функція регулятора швидкості
![]()
де
![]() .
.
- При
![]() ,контакт К розімкнутий,
передавальна функція РШ
,контакт К розімкнутий,
передавальна функція РШ
![]() має такий же вид, але вираз для коефіцієнта
підсилення
має такий же вид, але вираз для коефіцієнта
підсилення![]() і постійної часу
і постійної часу![]() будуть іншими:
будуть іншими:![]()
![]() .
.
При цих умовах відбувається зменшення коефіцієнта підсилення і збільшення постійної часу РШ, що приводить до зменшення полоси пропускання ЕП.
Розрахунок параметрів РШ
Розрахунок параметрів РШ проводять виходячи зі значень частоти зрізу при занижених і підвищених швидкостях. Передавальна функція розімкнутого контура швидкості має вигляд:
![]() ,
,
де
![]() —
результуючий коефіцієнт підсилення.
—
результуючий коефіцієнт підсилення.
![]()
У ЛАЧХ слідує![]()

Рис. 13.4. ЛАЧХ
контура швидкості
Значення
постійної часу
![]() вибирають, виходячи із
забезпечення достатнього заносу по
фазі й отримання потрібного перерегулювання
в замкнутій системі.
вибирають, виходячи із
забезпечення достатнього заносу по
фазі й отримання потрібного перерегулювання
в замкнутій системі.
З ТАУ відомо,
щоб відношення
![]() не перевищувало заданого значення
не перевищувало заданого значення![]() ,
необхідно виконати умову
,
необхідно виконати умову
![]() ,
,
де А – деяка
функція від
![]()
![]() .
.
Якщо
позначити
![]() (де
(де![]() —
частота зрізу при підвищених значеннях
швидкості), врахувати (рекомендації
заводом-виготовлювачем) значення
—
частота зрізу при підвищених значеннях
швидкості), врахувати (рекомендації
заводом-виготовлювачем) значення![]() і прийняти
і прийняти![]() (що відповідає перерегулюванню 11%), то
отримаємо наступний вираз для розрахунку
елементів електричної схеми рис. 13.3.
(що відповідає перерегулюванню 11%), то
отримаємо наступний вираз для розрахунку
елементів електричної схеми рис. 13.3.
![]() ;
;
![]()
![]()
Рекомендоване
значення
![]() .
.
Опір резистора
![]() вибирають із умови
вибирають із умови
![]() .
.
Значення
коефіцієнта передачі датчика струму
![]() для ЕП ЭПБ2наведено в
таблиці 2
для ЕП ЭПБ2наведено в
таблиці 2
|
Блок регулювання |
Струм, А |
|
|
БС4102 – 295 |
8 |
0,375 |
|
БС4102 – 325 |
16 |
0,188 |
|
БС4102 - 345 |
25 |
0,119 |
Лекція № 14 . Синтез систем керування еп промислових роботів.
У першій частині лекції була розглянута функціональна схема побудови ЕП, яка складається з аналогового ЕП і контуру цифрового регулювання положення. Основним типом ЕП, як було відмічено, є ЕП ПТ з високомоментним двигуном і напівпровідниковим перетворювачем.
Перспективні розробки ЕП напрямлені на збільшення максимальної швидкості у більшому діапазоні зміни моментів, із покращенням масово–габаритних показників. Усе більше розповсюдження в ЕП ПР знаходять безколекторні двигуни (вентильні).
До особливостей ЕП ПР, що випускаються вітчизняною і зарубіжною промисловістю, слід віднести у першу чергу розширений до 0,05 Нм діапазон малих моментів, максимальної швидкості підвищені до (10…15)103 об/хв, зменшену інерцію двигунів, можливість вбудовування у двигун електромагнітних гальм і різних датчиків, а також механічних і хвильових передач.
При розробці ЕП із окремих елементів основною задачею правильний вибір і компоновка елементів у залежності від вимог до ЕП.