

Лекція 13. Типові структури регульованих еп.
Методика синтезу систем заснована на лінеаризації структур ЕП, описі їхніми диференціальними рівняннями не вище від третього порядку і застосуванні місце частотних методів більш точних кореневих методів, що дають однозначні зв'язки між показниками якості та коефіцієнтами диференціального рівняння. Методикою передбачено два етапи процедури синтезу.
На першому етапі – система ЕП описується лініаризованою структурою при нехтуванні інерційністю і дискретністю силового перетворювача, й знаходяться умови оптимального настроювання в такій структурі.
На другому етапі – аналізується вплив властивостей перетворювача (тиристорного, транзисторного) на припустиму смугу пропущення лінійної частини передавальної функції, що характеризує граничну швидкодію при заданій якості перехідних процесів.
Установлено і практично доведено, що коли смугу пропущення обмежити ділянкою, де вплив специфічних властивостей перетворювача не значний, то його можна вважати безінерційною ланкою.
На
практиці смугу пропущення встановлюють
у діапазоні частот гармонійних сигналів,
у якому зрушення фаз перших гармонік
сигналу завдання швидкості й зворотного
зв'язку в швидкості не перевищує
![]() або ослаблення сигналу зворотного
зв'язку по відношенню до сигналу завдання
не перевищує 3дБ.
або ослаблення сигналу зворотного
зв'язку по відношенню до сигналу завдання
не перевищує 3дБ.
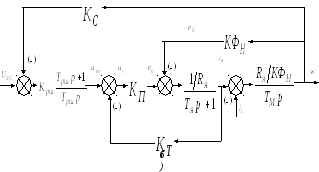
Вимоги глибокого регулювання в приводах металорізальних верстатів і промислових роботів відповідають астатичні системи регулювання швидкості. Найбільш поширені лінеаризовані структури САК наведені на рисунку 13.1.

Рис.13.1. Лінійні
структури широка регульованих
електроприводів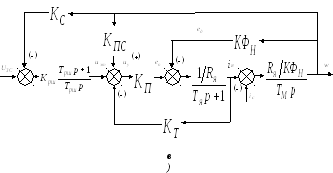

1. Одноконтурна з ПІ – регулятором швидкості (13.1 а).
2. Двоконтурна з ПІ – регулятором швидкості і твердим зворотним зв'язком по
току на вхід перетворювача (13.1 б).
3. Аналогічна 2, але з позитивним зворотним зв'язком у ЕРС двигуна на вхід
перетворювача (13.1 в)
4. Двоконтурна з ПІ – регулятором швидкості та струму (13.1 г).
До схеми 3 наводяться структури комплектних ЕП типу ЭПУ, ЭШИМ і ЭПБ.
При
повній компенсації внутрішньої ОС у
ЕРС двигуна (![]() ) сигнали на виході динамічної системи
(13.1 в) визначається співвідношенням:
) сигнали на виході динамічної системи
(13.1 в) визначається співвідношенням:
![]() (13.1)
(13.1)
![]() (13.2)
(13.2)
![]() (13.3)
(13.3)
Після перетворення системи рівнянь одержимо диференціальне рівняння, що описує властивості замкнутої САК:
 (13.4)
(13.4)
яке зручно представити у вигляді:
![]() (13.5)
(13.5)
Перейдемо в (13.5) до безмірного оператора D, що зв'язаний з оператором p співвідношенням
![]() ,
,
![]() [1/З] – масштаб часу (t* — безрозмірний
час). (13.6)
[1/З] – масштаб часу (t* — безрозмірний
час). (13.6)
Для структури 3 масштаб часу
![]() . (13.7)
. (13.7)
Уведемо безрозмірні величини:
-
впливу, що задає
![]() ;
;
-
збурювання впливу
![]() ;
;
-
вихідної координати САК
![]() .
.
Підставимо в (13.5)
![]() ,
,
-
поділимо праву і ліву частину отриманого
рівняння на
![]() й одержимобезрозмірне
(нормоване) диференціальне рівняння:
й одержимобезрозмірне
(нормоване) диференціальне рівняння:

з огляду на співвідношення:
![]() ;
;
![]()

Рівняння приймає вид:
![]() (13.8)
(13.8)
де
![]() для донної структури.
для донної структури.
Виконавши аналогічні перетворення для структур 1, 2, і 4 видно, що до виду (13.8) приводяться описи процесів у всіх чотирьох розглянутих структурах. Причому запис у нормованому виді дозволяє шукати узагальнені рішення й одержувати узагальнені характеристики всіх систем. Математичний опис для структур 2,3 і 4 приводяться в таблиці.
Для
структури 1 варто користуватися описом
структури 2, дорівнявши в ньому Об
коефіцієнт обробки зв'язку по струму
![]() .
.
(Лебедєв А.З, Остриров В.Н., Електропривод для верстатів иПР, М, МЭН, 1991) ст.77.