

3.3. Основні технічні показники промислових роботів
ПР характеризуються основними технічними показниками, що несуть у собі інформацію як для вибору ПР з числа випущених промисловістю, так і для проектування нового ПР для визначення галузі виробництва, котра задає свої технологічні вимоги.
До числа основних технологічних вимог належать такі:
вантажопідйомність,
число ступенів рухомості,
робоча зона,
мобільність.
Під вантажопідйомністю розуміють сумарну вантажопідйомність його рук. Вантажопідйомність руки – це найбільша маса об’єктів маніпулювання, включаючи масу захватного пристрою, яка може переміщуватися рукою при заданих умовах (максимальна або мінімальна швидкість, максимальний виліт руки і т.п.) При виконанні ПР з кількома руками поряд із сумарною вантажопідйомністю повинна вказуватися вантажопідйомність однієї руки.
Для деяких типів ПР важливим показником є зусилля (або обертовий момент), що розвиваються виконавчим механізмом при заданих умовах. До числа таких показників можна віднести зусилля затискання (захвату, утримання) об’єкта маніпулювання захватним пристроєм, робоче зусилля руки ПР уздовж її поздовжньої осі, обертальний момент при ротації захватного пристрою.
Число ступенів рухомості ПР – це сума можливих координатних рухів об’єктів маніпулювання відносно опорної системи (стійки, основи) ПР. Для деяких типів ПР, що застосовуються на операціях збирання, інколи додатково визначають число ступенів рухомості захватного пристрою відносно вузла його кріплення до руки робота.
Похибка позиціювання визначається як відхилення заданої позиції виконавчого механізму від фактичної при багатократному повторенні позиціювання. Ця похибка оцінюється в лінійних або кутових одиницях вимірювання координат. Стосовно ПР важливим показником є сумарна похибка позиціювання всіх виконавчих механізмів, узята як відхилення фактичного положення об’єкта маніпулювання від заданого.
Робоча зона ПР – простір, у котрому при роботі може знаходитися робочий орган маніпулятора. При роботі кількох ПР як характеристикка робототехнічного комплексу наводиться зона спільного обслуговування – частина простору, у котрому переміщення об’єкта маніпулювання можуть виконуватися кількома ПР.
Мобільність ПР визначається його можливістю здійснювати орієнтуючі та транспортуючі рухи відносно опорної системи (стаціонарні ПР) і додатково до названих ще й координатні рухи разом з опорною системою (пересувні ПР).
Лекція 4 . Системи основних координатних переміщень. Поняття однорідних координат
4.1. Система основних координатних переміщень
До основних координатних переміщень належать усі орієнтуючі рухи механічної системи і додаткові переміщення ПР без урахування рухів захвату.
С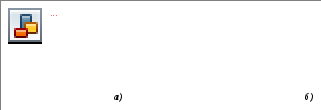 истема
координат буває плоска й просторова.
На рисунках.1, 3, 6 зображені відповідно
прямокутна, полярна й ангулярна (кутова)
плоскі системи координат, а на рисунках.2,
4, 7, 8 – прямокутна, циліндрична, сферична,
ангулярна циліндрична й ангулярна
сферична просторові системи координат.
Там же наведені приклади структурних
кінематичних схем ПР, що працюють у
поданих на рисунках координатах, і форми
робочих зон ПР без урахування обмежень
координат (рис.4.1 – 4.4)
і з їх урахуванням (рис.4.2
– 4.8).
истема
координат буває плоска й просторова.
На рисунках.1, 3, 6 зображені відповідно
прямокутна, полярна й ангулярна (кутова)
плоскі системи координат, а на рисунках.2,
4, 7, 8 – прямокутна, циліндрична, сферична,
ангулярна циліндрична й ангулярна
сферична просторові системи координат.
Там же наведені приклади структурних
кінематичних схем ПР, що працюють у
поданих на рисунках координатах, і форми
робочих зон ПР без урахування обмежень
координат (рис.4.1 – 4.4)
і з їх урахуванням (рис.4.2
– 4.8).
Рис.4.1. Прямокутна плоска система координат (а); структурна кінематична схема ПР (б); форма робочих зон (а)
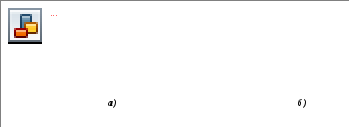
Рис.4.2. Прямокутна просторова система координат (а), структурна схема ПР (б_, форми робочих зон (а)
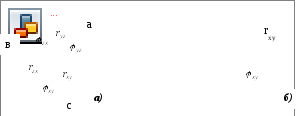
Рис.4.3. Полярна плоска система координат (а), структурна кінематична схема ПР (б), форми робочих зон (а)
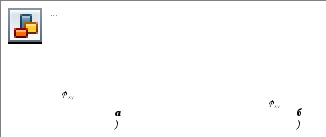
Р ис.4.4.
Полярна циліндрична система координат
(а), структурна кінематична схема ПР
(б), форми робочих зон (а)
ис.4.4.
Полярна циліндрична система координат
(а), структурна кінематична схема ПР
(б), форми робочих зон (а)
Рис.4.5. Полярна сферична система координат (а), форми робочих зон з урахуванням обмежень координат (б), структурна кінематична схема ПР (в)

Р ис.4.6.
Ангулярна плоска система координат
(а), форми робочих зон з урахуванням
обмежень координат (б), структурна
кінематична схема ПР (в)
ис.4.6.
Ангулярна плоска система координат
(а), форми робочих зон з урахуванням
обмежень координат (б), структурна
кінематична схема ПР (в)
Р ис.4.7.
Ангулярна циліндрична система координат
(а), форми робочих зон з урахуванням
обмежень координат (б), структурна
кінематична схема ПР (в)
ис.4.7.
Ангулярна циліндрична система координат
(а), форми робочих зон з урахуванням
обмежень координат (б), структурна
кінематична схема ПР (в)
Рис.4.8. Ангулярна сферична система координат (а), форми робочих зон з урахуванням обмежень координат (б), структурна кінематична схема ПР (в)
Системи координат розділяються на прямокутні й криволінійні. У прямокутних системах об’єкт маніпулювання переміщується тільки шляхом прямолінійних поступальних рухів ланок механічної системи ПР по двох (рис.4.1.) або трьох (рис.4.2) взаємно-перпендикулярних осях (0Х, 0У, 0Z). У криволінійних системах наявні обертальні рухи ланок механічної системи ПР відносно якої-небудь з осей 0Х, 0У, 0Z.Найбільш розповсюджена плоска (рис.4.3, 4.6), циліндрична (рис.4.4, 4.7) і сферична (рис.4.5, 4.8) системи.
У плоскій полярній системі (рис.4.3) переміщення об’єкта відбуваються в одній координатній площині х0у, у0z, z0х у напрямках вектора r або кута φ. У циліндричній системі (рис.4.4) об’єкт переміщується в основній координатній площині х0у в напрямках r i φ, а також по нормалі до неї в напрямку осі 0z. У сферичній (полярній) системі (рис.4.5) об’єкт маніпулювання переміщується в просторі за рахунок руху руки на величину r та її кутових переміщень φ і θ у двох взаємно перпендикулярних площинах.
Різновидами криволінійної системи є плоска ангулярна (рис.4.6), просторово–циліндрична (рис.4.7) і сферична (рис.4.8) системи координат. У ангулярній системі координат працюють багатоланкові шарнірні руки ПР та маніпуляторів.
В ангулярній плоскій системі об’єкт маніпулювання переміщується в одній з координатних площин, наприклад, х0у, як показано на рисунку.4.6, завдяки відносним поворотам ланок руки, що мають незмінну довжину.
Ангулярна циліндрична система характеризується додатковим зміщенням відносно основних координатних площин у напрямку, перпендикулярному до неї координатної осі (0z на рис.4.7).
В ангулярній сферичній системі координат переміщення об’єкта у просторі проходить тільки за рахунок відносних кутових поворотів ланок руки, при цьому хоча б одна ланка має можливість повороту на кути φ і θ у двох взаємно перпендикулярних площинах (на рис.4.8 обидві ланки можуть повертатися на кути φ і θ).
Розподіл відомих моделей ПР залежно від системи основних координатних переміщень у наш час:
плоска прямокутна – 12%;
просторова прямокутна – 8%;
плоска полярна – 2,5%;
циліндрична – 58,5%;
сферична – 11%;
ангулярна плоска – 0,5%;
ангулярна циліндрична – 5%;
ангулярна сферична – 2,5%.
Як видно з наведених даних, найбільша кількість моделей ПР працюють у сферичній системі координат, разом з цим в наступні роки спостерігається тенденція зростання числа конструкцій ПР, що використовують ангулярні системи координат.