

Лекція № 15 . Системи дистанційного керування роботами
15.1. Системи дистанційного керування
15.1.1. Системи командного керування
Найпростішим видом дистанційного керування роботами є система командного керування, коли натисканням на кнопку, тумблер чи ручку пульта керування оператор пускає в хід безпосередньо привід одного ступеня рухомості виконавчого пристрою робота. Точність позиціювання в таких системах невелика за рахунок відсутності ЗЗ по положенню. Для обмеження переміщення ставляться кінцеві вимикачі.
Системи командного керування часто застосовуються на керованих людьми підводних апаратах, людина керує рухами робота, стежачи за ним та навколишньою обстановкою через ілюмінатор (або монітор).
Командний спосіб керування застосовується також і для дистанційного навчання руху ПР, для забезпечення руху робота у кількох критичних (аварійних) ситуацій.
15.2. Системи копіювального керування
Основна особливість цих систем – використання задавального пристрою, що має кінематичну подібність із виконавчим пристроєм робота. Головною перевагою систем копіювального керування є максимальна точність відтворення ВО всіх дій задавального пристрою. Тому маніпуляційні системи копіювального керування є найбільш універсальними пристроями, що дозволяють виконати різні й найбільш складні операції. Копіювальні системи керування підрозділяються на системи односторонньої та двосторонньої дії.
Системи односторонньої дії – це коли можлива лише однонапрямлена дія на маніпулятор з боку ЗП. При цьому рух ЗП під дією зусилля з боку навантаження неможлива.
Основний недолік цієї системи – відсутність у оператора інформації про силову дію виконавчого пристрою на об’єкт роботи, яка дає змогу формувати найбільш раціональні закони керування рухом при виконанні технологічних операцій.
Системи двосторонньої дії – це коли для підвищення ефективності дій оператора і маніпулятора створюється відчуття робочих зусиль на задавальному пристрої. Системи двосторонньої дії називають також зворотними стежачими системами.
Оператор, працюючи з таким маніпулятором, має можливість організовувати найбільш раціональний рух ВП. На рисунку 15.1 наведена структурна схема двосторонньої дії.
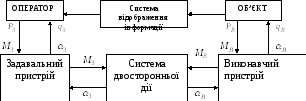
Рис.15.1. Структурна схема СК копіювального маніпулятора двосторонньої дії:
Р3 = (Р31, …Р3r); Рв = (Рв1,…Рвr) – вектори зусиль, відповідно на задавальному і виконавчому пристроях (r – число ступенів рухомості); М3 = (М31, …М3r); Мв = (Мв1,…Мвr) – вектори моментів на задавальному й виконавчому пристроях; q3, qв – узагальнені координати переміщення, α3, αв – кутові узагальнені координати
Оператор за допомогою ручки керування діє на ЗП, що імітує рух руки в просторі. Задаючи положення та орієнтацію ручки (координати q3 і α3), оператор прикладає в неї у необхідному напрямку необхідні зусилля й моменти (Р3 і М3), що приводить до переміщення ЗП з координатами α3і, М3і, (і = 1…r).
Система двосторонньої дії забезпечує двонапрямлену передачу цих переміщень і моментів по кожному ступені рухомості від ЗП до ВП. Дія об’єкта на ВП передається через систему двосторонньої дії та кінематику ЗП на ручку керування й, отже, сприймається людиною, тобто забезпечується ефект безпосереднього виконання рукою людини виробничої операції.
За структурою зворотні стежачі системи підрозділяються на системи симетричного і несиметричного типів.
Зворотна стежачача система симетричного типу являє собою систему двосторонньої дії, що складається з 2-ох систем: одна з них керує положенням вала навантаження, а інша – положенням вала оператора. Сукупність систем забезпечує передачу кутових переміщень і передачу моментів, прикладених до осей системи.
Зворотна стежачача система несиметричного типу суміщає в собі виконавчу систему, що керує положенням вала навантаження та моментний навантажувач, що інформує оператора про навантажувальні моменти на виконавчому боці.