

Связь цилиндрической и декартовой прямоугольной
системами координат.
Аналогично полярной системе координат на плоскости можно записать соотношения, связывающие между собой различные системы координат в пространстве. Для цилиндрической и декартовой прямоугольной систем эти соотношения имеют вид:
h
= z; x = rcos;
y = rsin;
cos
=
![]() ;
sin
=
;
sin
=
![]() .
.
Связь сферической системы координат с
декартовой прямоугольной.
В случае сферической системы координат соотношения имеют вид:
![]()
![]()
§6. Линейные преобразования.
Определение:Будем считать, что
в линейном пространствеLзадано некоторое линейное преобразование
А, если любому элементу![]() Lпо некоторому правилу
ставится в соответствие элемент А
Lпо некоторому правилу
ставится в соответствие элемент А![]() L.
L.
Определение:Преобразование А называетсялинейным,
если для любых векторов![]() Lи
Lи![]() Lи любоговерно:
Lи любоговерно:
A(![]() +
+![]() )
=A
)
=A![]() +A
+A![]()
A(![]() )
=A
)
=A![]()
Определение:Линейное преобразование называетсятождественным, если оно преобразует элемент линейного пространства сам в себя.
Е![]() =
=![]()
Пример.Является ли А линейным преобразованием.
А![]() =
=![]() +
+![]() ;
;![]() 0.
0.
Запишем преобразование А для какого-
либо элемента
![]() .
А
.
А![]() =
=![]() +
+![]()
Проверим,
выполняется ли правило операции сложения
для этого преобразования А(![]() +
+![]() )
=
)
=![]() +
+![]() +
+![]() ;A(
;A(![]() )
+A(
)
+A(![]() )
=
)
=![]() +
+![]() +
+![]() +
+![]() ,
что верно только при
,
что верно только при![]() =
0, т.е. данное преобразование А нелинейное.
=
0, т.е. данное преобразование А нелинейное.
Определение:Если в пространствеLимеются векторы линейного преобразования![]() ,
то другой вектор
,
то другой вектор![]() являетсялинейной комбинациейвекторов
являетсялинейной комбинациейвекторов![]() .
.
Определение:Если![]() только при== … == 0, то векторы
только при== … == 0, то векторы![]() называютсялинейно независимыми.
называютсялинейно независимыми.
Определение:Если в линейном пространствеLестьnлинейно независимых векторов и любыеn + 1 векторов линейно зависимы, то пространствоLназываетсяn-мерным, а совокупность линейно независимых векторов называетсябазисомлинейного пространстваL.
Следствие:Любой вектор линейного пространства может быть представлен в виде линейной комбинации векторов базиса.
Пусть в n-мерном линейном пространстве с базисом![]() ,
,![]() ,…,
,…,![]() задано линейное преобразование А. Тогда
векторы А
задано линейное преобразование А. Тогда
векторы А![]() ,А
,А![]() ,…,А
,…,А![]() -
также векторы этого пространства и их
можно представить в виде линейной
комбинации векторов базиса:
-
также векторы этого пространства и их
можно представить в виде линейной
комбинации векторов базиса:
A![]() =
a11
=
a11![]() +
a21
+
a21![]() +…+
an1
+…+
an1![]()
A![]() =
a12
=
a12![]() +
a22
+
a22![]() +…+
an2
+…+
an2![]()
……………………………….
A![]() =an1
=an1![]() +an2
+an2![]() +…+ann
+…+ann![]()
Тогда матрица
А =
 называетсяматрицей линейного
преобразования А.
называетсяматрицей линейного
преобразования А.
Если в
пространстве Lвзять
вектор
![]() =x1
=x1![]() +x2
+x2![]() +…+xn
+…+xn![]() ,
тоA
,
тоA![]() L.
L.
![]() ,
где
,
где
![]()
![]()
……………………………..
![]()
Эти
равенства можно назвать линейным
преобразованием в базисе![]() ,
,![]() ,…,
,…,![]() .
.
В матричном виде:
 ,
А
,
А ,
,![]()
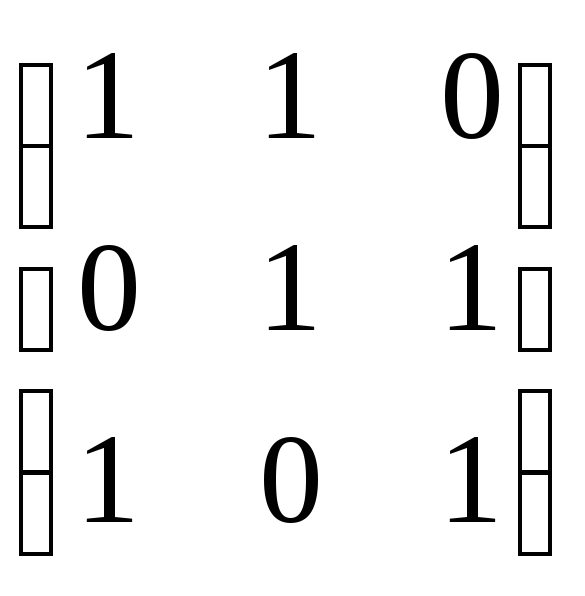
Пример.Найти матрицу линейного преобразования, заданного в виде:
x = x + y
y = y + z
z = z + x
x = 1x + 1y + 0z
y= 0x+ 1y+ 1z
z= 1x+ 0y+ 1z
A=
На практике действия над линейными преобразованиями сводятся к действиям над их матрицами.
Определение:Если вектор![]() переводится
в вектор
переводится
в вектор![]() линейным преобразованием с матрицей
А, а вектор
линейным преобразованием с матрицей
А, а вектор![]() в вектор
в вектор![]() линейным преобразованием с матрицей
В, то последовательное применение этих
преобразований равносильно линейному
преобразованию, переводящему вектор
линейным преобразованием с матрицей
В, то последовательное применение этих
преобразований равносильно линейному
преобразованию, переводящему вектор![]() в вектор
в вектор![]() (оно
называетсяпроизведением составляющих
преобразований).
(оно
называетсяпроизведением составляющих
преобразований).
С = ВА
Пример.Задано линейное преобразование А,
переводящее вектор![]() в
вектор
в
вектор![]() и линейное преобразование В, переводящее
вектор
и линейное преобразование В, переводящее
вектор![]() в вектор
в вектор![]() .
Найти матрицу линейного преобразования,
переводящего вектор
.
Найти матрицу линейного преобразования,
переводящего вектор![]() в вектор
в вектор![]() .
.

![]()
![]()
С = ВА


Т.е.

Примечание:ЕслиА= 0, то преобразование вырожденное, т.е., например, плоскость преобразуется не в целую плоскость, а в прямую.