

§3. Линейная комбинация векторов.
Определение. Линейной комбинацией
векторов![]() ,
,![]() ,
. . .
,
. . .![]() с действительными коэффициентами,, . . .,,
называется вектор
с действительными коэффициентами,, . . .,,
называется вектор![]() .
.
Утверждения:
Если векторы
 и
и коллинеарны,
то их линейная комбинация с некоторыми
действительными числамии(≠0
и≠0) равна нулю:
коллинеарны,
то их линейная комбинация с некоторыми
действительными числамии(≠0
и≠0) равна нулю:
Действительно,
![]() и, наоборот, если
и, наоборот, если![]() ||
||![]()
![]()
(самостоятельно).
Если векторы
 ,
, и
и - компланарны, то найдутся такие числа,,(≠0), что их линейная
комбинация будет равна нулю ( и наоборот),
т.е.
- компланарны, то найдутся такие числа,,(≠0), что их линейная
комбинация будет равна нулю ( и наоборот),
т.е.
![]() ,
,![]() и
и![]() - компланарны
- компланарны![]()
Определение.Линейно независимыми векторами на плоскости называются два вектора, если они не коллинеары; а в 3-ех мерном пространстве – три вектора, если они не компланарны.
Определение.Два или три ортогональных (перпендикулярных) вектора являются линейно независимыми и образуют двойку или тройку линейно независимых векторов.
Определение. Если три единичных вектора (длина которого равна единице) взаимно перпендикулярны и образуют правую тройку векторов, то они являются базой прямоугольной декартовой системы координат.
Обозначается
![]() -ортыкоординат.
-ортыкоординат.
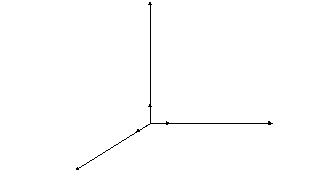 Система
координат называетсяправой,потому
что векторы
Система
координат называетсяправой,потому
что векторы![]() имеют такую же ориентацию, как
соответственно большой, указательный
и средний пальцы правой руки. Для
определения правого направления системы
координат может быть использованоправило правого винта:если винт
вкручивается в осьOZсо
стороны 0, то отвертка вращается отXкY.
имеют такую же ориентацию, как
соответственно большой, указательный
и средний пальцы правой руки. Для
определения правого направления системы
координат может быть использованоправило правого винта:если винт
вкручивается в осьOZсо
стороны 0, то отвертка вращается отXкY.
Вектор
![]() в прямоугольной декартовой системе
координат записывается в виде:
в прямоугольной декартовой системе
координат записывается в виде:![]() ,
гдеax,
ay,
az– прямоугольные декартовы координаты
вектора
,
гдеax,
ay,
az– прямоугольные декартовы координаты
вектора![]() или проекции этого вектора на
соответствующие оси.
или проекции этого вектора на
соответствующие оси.
В прямоугольной декартовой системе
координат каждой точке М однозначно
соответствует вектор
![]() ,
который называется радиус-вектором
точки М. Декартовы координаты вектора
,
который называется радиус-вектором
точки М. Декартовы координаты вектора![]() отнесенные
к
отнесенные
к![]() ,
называются декартовыми координатами
точки М.
,
называются декартовыми координатами
точки М.
§4. Скалярное произведение векторов.
Пусть
![]() и
и![]() - произвольные векторы, а- угол между ними:
- произвольные векторы, а- угол между ними:

![]()


![]()
Определение.
Скалярным произведением векторов![]() и
и![]() называется число, равное произведению
длин этих векторов на косинус угла между
ними:
называется число, равное произведению
длин этих векторов на косинус угла между
ними:

![]()
![]() =
=![]()
![]() cos(3.1)
cos(3.1)
Свойстваскалярного произведения:
 =
=
 - переместительный закон;
- переместительный закон;(
 )
) =
= (
( )
=(
)
=(
 ),=const– сочетательный закон относительно
умножения на число;
),=const– сочетательный закон относительно
умножения на число; (
( +
+ )
=
)
=
 +
+
 - распределительный закон относительно
суммы векторов;
- распределительный закон относительно
суммы векторов;

 =
= 2=
2= 2(3.2) –формула
скалярного квадрата.
2(3.2) –формула
скалярного квадрата.
![]()
![]() =
=![]()
![]() cos(
cos(![]() ,
,![]() )
=
)
= ![]() 2
cos0
=
2
cos0
= ![]() 2.
2.
Из (3.2) ![]() =
=![]() -длина вектора равна корню квадратному
из его скалярного квадрата.
-длина вектора равна корню квадратному
из его скалярного квадрата.

 = 0, если
= 0, если
 и наоборот, если
и наоборот, если
 = 0, то при
= 0, то при 0 и
0 и 0 векторы
0 векторы и
и взаимно
перпендикулярны – этоусловие
перпендикулярности двух векторов:
взаимно
перпендикулярны – этоусловие
перпендикулярности двух векторов:
![]()
![]()
![]()
![]() = 0 (3.3)
= 0 (3.3)
Если рассматривать векторы
![]() в
декартовой прямоугольной системе
координат, то
в
декартовой прямоугольной системе
координат, то

![]()
![]() =xa
xb
+ ya
yb
+ za
zb
(3.4) -скалярное произведение
векторов
в координатной форме
=xa
xb
+ ya
yb
+ za
zb
(3.4) -скалярное произведение
векторов
в координатной форме
Используя полученные равенства (3.1) и (3.4), получаем формулу для вычисления угла между векторами:
![]()
 (3.5)
(3.5)
Пример.Найти (5![]() + 3
+ 3![]() )(2
)(2![]() -
-![]() ),
если
),
если![]()
Пример.Найти угол между векторами![]() и
и![]() ,
если
,
если![]()
![]() .
.
Пример.Найти скалярное произведение (3![]() - 2
- 2![]() )(5
)(5![]() - 6
- 6![]() ),
если
),
если![]()
Пример.При какомmвекторы![]() и
и![]() перпендикулярны.
перпендикулярны.
Пример.Найти скалярное произведение векторов![]() и
и![]() ,
если
,
если![]()