

УстрАСУ / Конспект УАСУ
.pdf281
ЭЛЕКТРОПРИВОДА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ
1. СРАВНИТЕЛЬНЫЙ АНАЛИЗ СИСТЕМ ЭЛЕКТРОПРИВОДА С
ПАРАМЕТРИЧЕСКИМ УПРАВЛЕНИЕМ
Область применения того или иного электропривода может быть верно определена лишь после объективного сравнения сопоставимых, т. е. близких по техническим возможностям систем с учетом нагрева электродвигателя, КПД, надежности и экономической эффективности. Рассматриваемые электроприводы повторно-
кратковременного режима работы обеспечивают примерно одинаковые статические характеристики, а в замкнутых системах — механические характеристики любой желаемой формы и жесткости.
Электроприводы с ТРН принципиально отличаются от электроприводов с ТРТ тем,
что у них минимальный момент может быть равным нулю, а максимальный — ограничен введенным в цепь ротора сопротивлением. При управлении током ротора наименьший момент не может быть равным нулю из-за наличия сопротивлений в цепи ротора, когда тиристоры закрыты, а при естественной коммутации тиристоров в роторе ограничен и максимальный момент сопротивлением rRi (см. рис. 27, а).
При использовании ТРН для регулирования скорости с учетом возможности работы с номинальной скоростью в цепь ротора следует включать несколько ступеней резисторов с соответствующими коммутирующими аппаратами. Их количество определяется числом требуемых регулировочных характеристик и желаемой плавностью разгона при заданном моменте инерции механизма. В то же время при использовании ТРТ ротора исключается необходимость в комму-
281

282
В различных тиристорных регуляторах частота и амплитуда пульсаций электромагнитного момента двигателя в квазиустановившемся режиме неодинаковы.
Динамические нагрузки в звеньях механизма зависят главным образом от разности частот возмущающего воздействия и собственных колебаний, поэтому наиболее неблагоприятное воздействие на механизм оказывают схемы 2ТРН, ЗТРН, импульсные регуляторы в статоре при частоте коммутации 100 и 150 Гц, а также ТРТ в роторе с естественной коммутацией тиристоров. При их включении двигатель развивает на-
ибольшие составляющие момента с частотами 100 и 150 Гц, близкими к частотам свободных колебаний некоторых механизмов.
При импульсном управлении требуются специальные быстродействующие тиристоры с малым временем восстановления запирающих свойств, причем тем меньшим, чем выше частота коммутации. Важнейшими показателями электропривода являются электрические потери в двигателе. Электрические потери, выделяемые в двигателе при использовании разных систем электропривода, различны (рис. 54). Наименьшие потери свойственны схемам ТРТ с импульсным управлением. В них резисторы ротора, как и при реостатном регулировании, рассеивают значительную часть мощности скольжения. Сглаживающий дроссель и относительно высокая частота коммутации способствуют ограничению пульсаций тока и уменьшению потерь в обмотках статора и ротора. Наибольший нагрев двигателя наблюдается у схем ТРТ с естественной коммутацией тиристоров (см. рис. 27).
282
283
Значительное влияние оказывают потери в результате снижения коэффициента мощности цепи ротора при регулировании угла открывания тиристоров, а также потери от высших гармонических тока.
Схемы с ТРН отличаются от схемы с ТРТ ротора также н тем, что в них отсутствуют потери при идеальном холостом ходе. Поэтому при малых нагрузках (0...0,2МН) потери в двигателе, управляемом ТРН, значительно меньше. Однако при моментах, больших 0,5
Мн, потери изменяются незначительно.
Одним из существенных показателей при выборе электропривода (особенно для напряженно работающих механизмов) является надежность его работы. По надежности электропривод с естественной коммутацией тиристоров лишь незначительно уступает электроприводу с импульсным управлением. Отличие обусловлено прежде всего относительно низкой надежностью систем управления при естественной коммутации, в то же время силовая часть регуляторов с таким управлением характеризуется значительно более высокой надежностью.
Об экономической эффективности сравниваемых электроприводов удобно судить по приведенным годовым затратам, которые определяются капитальными вложениями и эксплуатационными расходами. Расчет приведенных годовых затрат проводился для различной продолжительности включения (ПВ) механизмов, работающих главным образом в установив* шемся режиме, и для разного числа включений в час приводов, у
которых переходные процессы составляют большую часть времени цикла.
Анализ свидетельствует о том, что наибольшие капитальные затраты при управлении двигателями одинаковой мощности оказываются для схем с большим числом тиристоров.
При изменении габаритных размеров двигателя от первого до пятого мощность на валу изменяется приблизительно в 12 раз, а капитальные затраты в пересчете на 1 кВт мощности уменьшаются для сравниваемых систем в 1,2—3 раза. Если продолжительность включения привода изменяется от 25 до 100 %, то капитальные затраты возрастают приб-
лизительно в 1,7 раза.
Одной из основных составляющих эксплуатационных расходов является стоимость потребляемой электроэнергии, которая при увеличении продолжительности включения электропривода растет. Так, при изменении ПВ от 25 до 100 % эксплуатационные расходы у всех сравниваемых электроприводов возрастают почти в четыре раза.
Графики зависимости приведенных годовых затрат рассматриваемых электроприводов от продолжительности включения ПВ, %, показаны на рис. 55, а. При расчете принималось, что 15 % рабочего времени двигатель работает на пониженной
скорости 0,1  развивая номинальный момент. Графики зависимости приведенных
развивая номинальный момент. Графики зависимости приведенных
283

284
годовых затрат от частоты включений двигателя мощностью 45 кВт, когда пусковой момент принят равным двукратному, а момент инерции — в два раза больше, чем момент инерции двигателя, показаны на рис. 55, б.
При мощности асинхронного двигателя до 45 кВт, диапазоне регулирования 10 : 1 и
времени работы на
пониженной скорости 15 % экономически целесообразно применять электропривод с естественной коммутацией: ТРТ при ПВ < 40 % и ТРИ при ПВ > 40 %. Электропривод с импульсным управлением в цепи ротора оказывается хуже ТРТ с естественной коммута-
цией тиристоров при ПВ < 80 % в связи с тем, что дополнительные капитальные затраты не покрываются уменьшением эксплуатационных расходов.
При увеличении мощности двигателя абсолютное значение потерь при регулировании возрастает быстрее, чем растут капитальные вложения. Так, при мощности привода 60
кВт равенство годовых приведенных затрат электроприводов с ТРИ и ТРТ и естественной коммутацией тиристоров наступает уже при ПВ = ** 25 %, а при мощности 10—15 кВт электропривод с ТРТ ротора оказывается предпочтительнее при всех ПВ.
Если механизмы работают главным образом в переходных режимах (рис. 55, б), то еще при 350—380'; включениях в час экономически целесообразнее применять электропривод с естественной коммутацией тиристоров в роторе, а при большем числе включений — электропривод с ТРН. Увеличение мощности привода приводит к тому, что экономически оправданное число включений в час для сравниваемых электроприводов уменьшается. Так, при мощности привода 60 кВт равенство годовых приведенных затрат для ТРТ и ТРН наступает уже при 200 включениях в час. При увеличении момента инерции или момента статического сопротивления снижаются преимущества
284
285
электропривода с тиристорами в роторе, поэтому при J* = 4 и Ml =* 1 его применение становится экономически неоправданным уже при 100 включениях в час и выше.
При 700 и более включениях в час, когда момент инерции равен двухкратному значению (либо более 100 —- если он превышает четырехкратный момент инерции двигателя), а также при повышенных требованиях к надежности предпочтение отдается электроприводу с импульсным управлением в цепи ротора.
2. ПРИМЕРЫ СХЕМ ЭЛЕКТРОПРИВОДОВ С ПАРАМЕТРИЧЕСКИМ УПРАВЛЕНИЕМ
Применение тиристорного асинхронного электропривода с параметрическим управлением ограничивается механизмами, непродолжительно работающими на пониженной скорости. К ним можно отнести крановые механизмы. Магнитные или силовые контроллеры в сочетании с тиристорными регуляторами значительно улучшают технические показатели механизмов, несущественно усложняют электропривод.
Рассмотрим схемы опытно-промышленных электро-
285
286
приводов крановых механизмов, требующих лишь небольших переделок
стандартных контроллеров.
Тиристорный асинхронный электропривод механизма подъема. Модернизация электропривода механизма подъема, работающего в легком режиме и управляемого силовым кулачковым контроллером, заключается в добавлении несимметричного ТРН. В
этом случае дополнительно обеспечиваются устойчивые пониженные скорости (5—10 %
286

287
номинальной) подъема и спуска практически любых грузов.
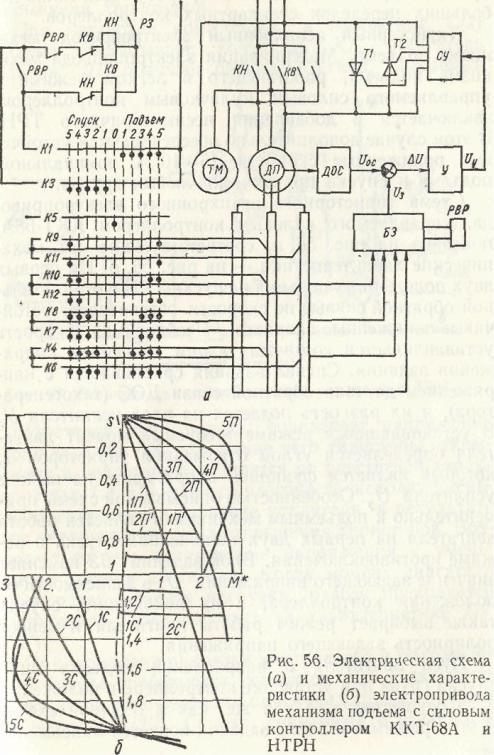
Схеме тиристорного асинхронного электропривода, управляемого силовым контроллером К.КТ-68А, показана на рис. 56, а, соответствующие им механические характеристики — на рис. 56, б. На первых двух положениях подъема и спуска ТРН с отрицательной обратной связью по скорости обеспечивает устойчивые пониженные скорости. Необходимая скорость устанавливается соответствующим значением напря-
жения задания. Сигнал задания сравнивается с напряжением датчика обратной связи ДОС
(тахогенера-тора), и их ра31.ость подается на вход усилителя У. В установившемся режиме требуемый момент двигателя определяется углом открывания тиристоров а,
который является функцией напряжения на выходе усилителя Uy. Особенностью описываемой схемы применительно к подъемным механизмам является работа двигателя на первых двух положениях спуска в режиме противовключения. Блок задания БЗ
изменяет значение задающего напряжения t/8 в зависимости от положения контроллера, а
на положениях спуска также выбирает режим работы двигателя и меняет полярность задающего напряжения.
Пуск двигателя в направлении подъема либо спуска груза при установке контроллера в положения 3—5 осуществляется так же, как в обычной схеме. В этих режимах с блока задания подается максимальная величина задающего напряжения для полного открывания тиристоров.
При установке контроллера в положение 1 (2) подъема срабатывает контактор КВ.
Двигатель подъема ДП получает питание. Сигнал, снимаемый
287
288
с резисторов цепи ротора, определяет напряжение блока задания БЗ, вследствие чего тиристоры открываются н двигатель разгоняется по реостатной характеристике W. По мере его разгона происходит уменьшение напряжения на входе усилителя, в результате чего увеличивается угол открывания тиристоров. Возрастает степень несимметрии напряжения и уменьшается момент двигателя. Когда момент двигателя будет равен моменту нагрузки, разгон прекратится и двигатель будет работать на характеристике W
(2П1).
При установке рукоятки контроллера в положение 1 (2) спуска срабатывает контактор
КН и двигатель разгоняется в направлении опускания груза по характеристике 1С {2С).
Сигнал, снимаемый с резисторов цепи ротора, подается на блок задания 55, которые
выдает определенное напряжение задания £/3, а также сигнал на реле выбора режима
РВР. Последнее переключает цепи |
катушек |
KB и КН, одновременно изменяя знак |
|||
задающего напряжения. При переключении |
контакторов реле |
РВР остается |
во |
||
включенном состоянии благодаря |
собственной |
выдержке времени. Так как задающее |
|||
напряжение подано такого знака, что |
тиристоры |
полностью закрыты, то происходит |
|||
разгон двигателя под действием веса груза.
Как только напряжение тахогенератора становится больше задающего, начинают открываться тиристоры, момент двигателя возрастает. Когда момент двигателя станет равным моменту от груза, разгон прекратится и двигатель будет работать с постоянной скоростью в режиме противовключения (благодаря перетягивающему грузу) на
характеристике 1С (2С),
Перевод рукоятки контроллера из положения / (2) спуска в любое положение подъема изменяет знак и значение задающего напряжения, благодаря чему полностью открываются тиристоры, а двигатель разгоняется по реостатной характеристике до заданной скорости. Переход с низких скоростей спуска на повышенные осуществляется отключением KB и включением КН, который шунтирует тиристоры 77 и Т2. Аналогично может работать электропривод с любым типом ТРИ в статоре, а также при модернизации
магнитного контроллера.
Применение описанного электропривода ограничивается механизмами, не требующими пониженной скорости в режиме силового спуска. Если такое требование все же предъявляется, то параллельно тиристорам несимметричного ТРИ подключается конденсатор. Схема управления в этом случае практически не отличается от изображенной на рис. 56, а, а механические характеристики на первых положениях контроллера близки к тем, которые показаны на рис. 8.
Управление тиристорами ТРИ осуществляется по вертикальному принципу. Из всего
288
289
многообразия схем управления следует отдать предпочтение тем из них, которые
содержат наименьшее число элементов (рис. 57). В такой схеме удачно сочетаются
нуль-орган и генератор импульсов, выполненные по схеме блокинг-генератора (Т2, СЗ, R7, TpJ). Он начинает генерировать прямоугольные импульсы с частотой 4—5 кГц в
момент, когда напряжение управления |
Uy станет равным линейно-изменяющемуся |
||||||
напряжению на конденсаторе |
С2. Последнее синхронизировано с сетью, так как |
||||||
источником заряда является напряжение синхронизации, выпрямленное мостом |
Д1. С |
||||||
началом положительной полуволны напряжения на резисторе R1 начинается заряд |
|||||||
конденсатора С2. Когда напряжение на нем достигает значения, равного |
напряжению |
||||||
синхронизации, конденсатор начнет разряжаться по |
цепи |
R1, |
ДЗ. |
Угол а |
|||
регулируется изменением напряжения управления Uy, снимаемого с |
выходного |
каскада |
|||||
усилителя (Т1 —  5). В рассмотренной схеме осуществляется управление двумя ти-
5). В рассмотренной схеме осуществляется управление двумя ти-
ристорами в одной фазе статора и обеспечивается изменение угла открывания от 0 до
170°.
В схеме рис. 56, а предусмотрена защита от выхода из строя или тиристора, или канала управления. Напряжение с тиристоров подается на блок защиты (рис. 58, а).
Напряжение на закрытых тиристорах определяется скольжением двигателя. График зависимости этого напряжения от скольжения для различных сопротивлений цепи ротора показан на рис. 58, б.
Напряжение на тиристорах при включенном контакте KB и скорости опускания груза
0,9 (он является пороговым для срабатывания узла защиты. Повышение напряжения на выходе Д1 до порогового значения свидетельствует об аварийной ситуации. При этом открывается тиристор 7*3, реле защиты РЗ теряет питание, размыкая контакт в цепи реверсивных контакторов (см. рис. 56, а), благодаря чему отключается двигатель и накладывается тормоз.
При
289

290
статора, и тиристорного регулятора тока ротора изображена на рис. 59. Там же показана структурная схема системы управления.
При регулировании угла открывания тиристоров механические характеристики электропривода по рис. 27, а располагаются между двумя реостатными,
соответствующими симметричным сопротивлениям гд[ и гД1 + гД2. Освободившиеся контакты контроллера, предназначавшиеся для коммутации цепи ротора, в
рассматриваемой схеме используются для регулирования напряжения задания.
Пуск двигателя осуществляется следующим образом: требуемая |
скорость задается |
|
установкой |
конт |
роллера |
290