

УстрАСУ / Конспект УАСУ
.pdf241
Основное влияние на увеличение потерь оказывают четные гармонические составляющие (вторая и четвертая) в схемах ЗТРН и импульсной при частоте коммутации
150 Гц, пятая гармоническая в схемах 6ТРН и импульсной при частоте коммутации 300
Гц, несимметрия напряжения и третья гармоническая в схемах 4ТРН и 2ТРН. При расчетах нужно учитывать именно эти составляющие.
.
РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
При наличии гармонических составляющих напряжений электромагнитный момент асинхронного дви] гателя является алгебраической суммой моментов от всех составляющих:
|
|
|
(2.27) |
|
Однако основное |
влияние |
на значение момента оказывает первая |
гармоническая |
|
составляющая |
как прямой, так и обратной последовательности (при несимметричном |
|||
регулировании), |
а |
также |
постоянная составляющая. Высшие же |
гармонические |
составляющие напряжения в большинстве расчетов асинхронного момента можно не учитывать. Например, при импульсном управлении для частот коммутации 150 и 200
Гц погрешность расчета момента вследствие неучета высших гармонических составляющих напряжения равна 7 %, а для частот 250 и 300 Гц 2,5 %. То же можно сказать о схемах с естественной коммутацией: для несимметричных схем (рис. 10)
241

242
из-за наличия третьей гармонической наибольшая по-грешность составляет 4-6%
Момент, развиваемый двигателем скольжении,
при данном
где  — относительное значение напряжения пер-вой гармонической при заданном угле а (скважности
— относительное значение напряжения пер-вой гармонической при заданном угле а (скважности  —момент двигателя при том же скольжении и номинальном
—момент двигателя при том же скольжении и номинальном
напряжении. В схемах, искажающих симметрию напряжения, развиваемый двигателем мо мент при данном скольжении s определяется по формуле (2.7).
Основной особенностью вращающегося асинхронного двигателя, существенно отличающей его от обычной трехфазной активно-индуктивной нагрузки, является наличие магнитной связи между обмотками фаз статора и ротора. Вследствие этого процессы коммутации в одной фазе оказывают влияние на остальные, а в отключенной от сети обмотке статора наводится ЭДС вращения еа, зависящая от скольжения и параметров
двигателя.
Выражения для расчета напряжений прямой и обратной последовательностей на
двигателе,
который питается от различных ТРН, номограммы для определения этих напряжении
в функции углов  также значения модуля
также значения модуля
и фазы напряжения на тиристорах приведены в работе [27]. Напряжение на тиристорах может быть рассчитано через сопротивления токам прямой Z1 и обратной Z2
последовательностей  :
:
(2.28)
а ЭДС вращения есть функция тех же параметров:
242

243
(2.29)
где Z1 и Z2 определяются е помощью выражений (2.10) и (2.11).
Как следует из формулы (2.29), чем больше отличаются сопротивления прямой и
обратной последовательностей, тем сильнее влияние ЭДС вращения. С помощью приведенных выражений можно предварительно оценить возможность пренебрежения
этой величиной. Погрешность от пренебрежения |
возрастает с увеличением скорости |
|
(для неподвижного двигателя |
= 0), угла а, а также с уменьшением сопротивления |
|
цепи ротора. Погрешность расчета |
|
|
момента двигателя при не учете ЭДС вращения значительно больше в несимметричных схемах. Так, при питании двигателя от схемы 2ТРН уже при скорости
 0,2 и угле а =110...180° она достигает 100 %. Однако при использовании схемы
0,2 и угле а =110...180° она достигает 100 %. Однако при использовании схемы
6ТРН погрешность расчета составляет 60...70 % лишь тогда, когда а > 90° и и* = 0,7... |
0,8, а |
схемы 4ТРН — 40...90 % при а > 90° и (о* = 0,5...0,8. Все эти данные получены при |
R* |
=0,1.
Вреальных электроприводах, когда на пониженной скорости в цепь ротора включается гораздо большее сопротивление, погрешность оказывается значительно меньше. Поэтому для большинства электроприводов при расчете механических
характеристик можно пользоваться номограммами, не учитывающими  (рис. 16). При работе двигателя с небольшими сопротивлениями в цепи ротора при высокой скорости следует пользоваться номограммами, учитывающими
(рис. 16). При работе двигателя с небольшими сопротивлениями в цепи ротора при высокой скорости следует пользоваться номограммами, учитывающими
ет [27].
243

244
При определении первых гармонических напряжений прямой Us1 и обратной Us2
последовательностей, необходимых для расчета моментов по формуле (2.7)
несимметричного электропривода 2ТРН — АД, допустимо пользоваться изображенными на рис. 17 номограммамы только в том случае, если двигатель работает с пониженной
скоростью (скольжение s = 0,8... 1,2), а сопротивление в цепи ротора не меньше  .
.
При всех других условиях необходимо производить уточненные расчеты момента с помощью номограмм, приведенных в работах [2, 27].
5. ФОРМИРОВАНИЕ ПЕРЕХОДНЫХ РЕЖИМОВ
Одной из важнейших задач при проектировании схем управления электроприводом является формирование заданной динамической диаграммы. Электро-привод,
работающий с большим числом включений в час, должен обеспечить интенсивные разгон,
реверсирование и торможение механизма. Минимальное время переходных процессов можно обеспечить лишь в том случае, если ускорение привода поддерживается постоянным и равным максимально допустимому значению.
В асинхронном электроприводе с ТРИ одним из способов ограничения ударных моментов и формирования динамических характеристик может быть включение,
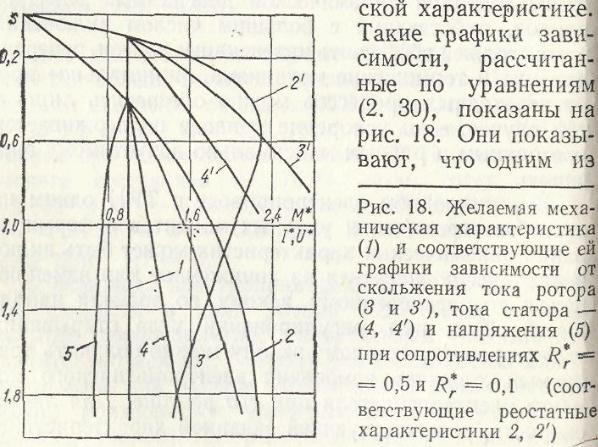
электродвигателя на пониженное или изменяющееся по определенному закону во времени напряжение. Так, при регулировании угла открывания тиристоров по заданному закону можно получить требуемый характер изменения электромагнитного момента электродвигателя при его разгоне. Для любой скорости, соответствующей заданной характеристике, напряжения и токи статора и ротора однозначно определяются значением момента:
(2.30)
где Мр — момент двигателя на реостатной характе-j ристике при номинальном
напряжении; Мп — момет на регулировочной характеристике;
эквивалентное сопротивление электродвигателя. Дл5 выбора типа обратных связей и расчета элементе)! схемы рассмотрим характер зависимости от скоростг некоторых величин (напряжения статора, токов статора и ротора), соответствующих заданной механиче-
244
245
способов формирования желаемых динамических характеристик является изменение по определенному закону угла открывания тиристоров в зависимости от скорости, тока статора или ротора [16].
В общем случае можно рекомендовать следующий порядок расчета:
245
246
а) |
построить желаемую механическую характеристику; |
б) |
рассчитать зависимость напряжения на статоре от скорости Us = / (s); |
в) |
построить с помощью номограмм рис. 16 график зависимости угла открывания |
тиристоров и связанного с ним напряжения управления от скорости. Для несимметричных
схем расчет затрудняется, так как в этом случае момент является суммой моментов от
напряжений прямой и обратной последовательностей. Насчет угла открывания тиристоров
необходимо |
проводить |
методом последовательных приближений с использованием |
|
соответствующих номограмм рис.17 или из работ [2, 27]; |
|
||
г) рассчитать по полученным зависимостям параметры используемой обратной связи. |
|||
По |
номограммам |
и |
зависимостям |
|
|
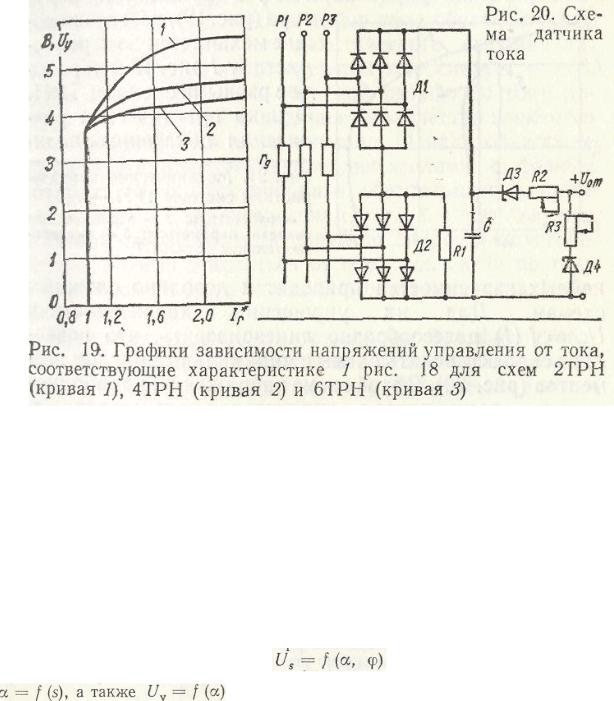
рассчитаны зависимости напряжения управления Uy в |
|
функции |
|
тока |
ро- |
246
247
нейных |
зависимостей приводит к |
довольно сложны схемам. |
Для |
их |
упрощения |
характеристик |
целесообразно линеаризовать, что позво ляет |
||
спроектировать схемы с минимальным числом эле ментов (рис. 20). В этой схеме
напряжение, пропорциональное току ротора, снимается с резисторов гя через
трехфазные выпрямители Д1, Д2 и фильтрую щий конденсатор С. Сигнал обратной связи формируется нелинейной цепью ДЗД4R2RЗ и подается на выходной каскад усилителя.
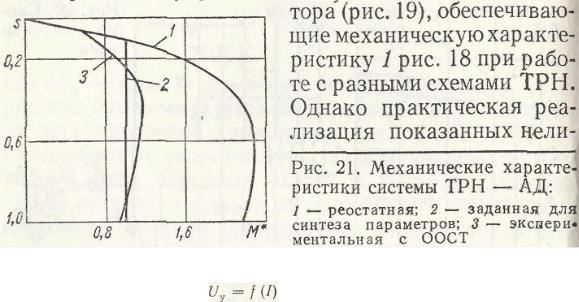
Хотя экспериментальные характеристики цепей обратных связей несколько отличаются от расчетных (рис. 19), но соответствующие им механические характеристики
(рис. 21) убеждают в допустимости примерной линеаризации для расчетов параметров цепа обратной связи.
Если выбрать нужный закон изменения напряжения управления в схемах ТРН с обратными связями но току статора или ротора или обеспечить закон изменения напряжения управления сигналом, пропорциональным скорости, то можно получить заданные механические характеристики [36, 50]. При использовании таких обратных связей в течение всего времени разгона момент поддерживается практически постоянным.
Основное влияние на выбор типа обратной связи оказывает удобство ее практического выполнения. По этим соображениям предпочтение следует отдать схеме с отрицательной обратной связью по току ротора, так как в ней наименьшее количество элементов к не требуется усиления сигнала. Однако область ее применения ограничивается двигателями с фазным ротором. Если электропривод обеспечивает жесткие механические характеристики, т. е. используется отрицательная обратная связь по скорости тахогенератора, можно отказаться от обратной связи по току и формировать динамические характеристики в функции скорости.
247
248
Недостатком рассмотренных способов формирования динамических характеристик является наличие первого всплеска момента, который остается равным амплитуде электромагнитного момента при пуске двигателя в разомкнутой системе. Вследствие запаздывания тиристоров его значение не зависит ни от схемы ТРН, ни от характера обратных связей. Необходимость подавления пусковых ударных моментов диктуется требованиями повышения долговечности механических передач. Для их ограничения можно использовать один из известных способов, заключающийся в том, что на вход системы вместо скачкообразного подается напряжение управления, изменяющееся по линейному либо экспоненциальному закону. В этом случае на время одного, двух периодов напряжения сети угол a>90°, т. е. к двигателю не прикладывается амплитуда
этого |
напряжения. |
При |
формировании |
напряжения |
по экспоненте |
|
удовлетворительные результаты |
получаются |
для всех |
схем ТРН |
рис.4, ecли L |
||
постоянная времени инерционного звена, включаемого в цепь напряжения управления,
равна 0,01...0,02 с|
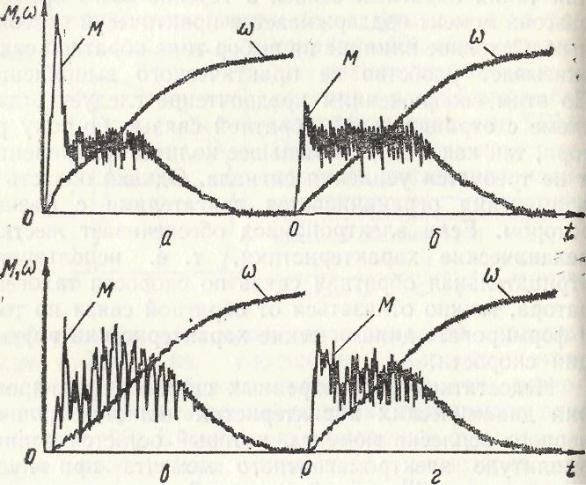
Рис. 22. Осциллограммы электромагнитных моментов при пуске системы ТРН — АД с ООСТ ротора в схеме 6ТРН (а), с ООСТ ротора и экспоненциальным изменением
248
249
напряжения задания в схемах 6ТРН (б), 4ТРН (в) и 2ТРН (г)
Осциллограммы момента и скорости при пуске двигателя, управляемого ТРН,
показаны на рис. 22. Во всех схемах при соответствующем подборе параметров цепей обратных связей можно получить требуемые динамические характеристики с ограничением ударного момента.
6. ПОСТРОЕНИЕ. СИСТЕМ УПРАВЛЕНИЯ ТИРИСТОРАМИ
Выбор системы управления тиристорами зависит от назначения ТРН, допустимой сложности и стоимости, требуемой надежности. По форме передаваемых сигналов они разделяются на аналоговые (при непрерывном изменении сигнала управления) и дис-
ния тиристоров в фазах. Однако для систем управления ТРН высокая точность регулирования угла открывания тиристоров решающего значения не имеет. Рассмотрим особенности структуры аналоговых систем управления, которые обеспечивают невысокую, но достаточную для системы управления ТРН точность отработки сигналов.
В зависимости от структуры аналоговые системы управления разделяют на многоканальные и одноканальные. Многоканальная система позволяет компоновать любую схему ТРН из модулей, предназначенных для управления нагрузкой в одной фазе
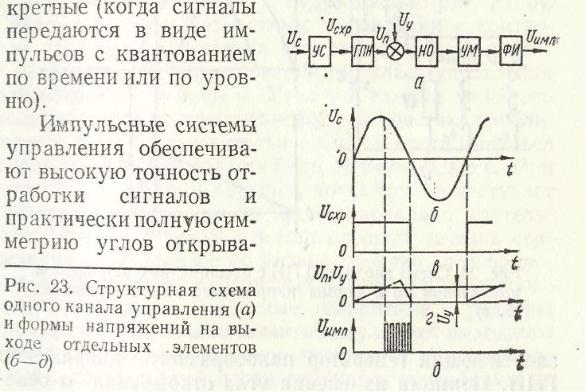
(2ТРН). Структурная схема одного канала таком системы показана на рис. 23, а.
Устройство синхронизации УС в положительный период напряжения] сети U0 (рис. 23, б)
выдает сигнал Uсхр (рис. 23, в),
249
250
запускающий генератор пилообразного напряжения ГПН. Принцип изменения угла
открывания а основан на сравнении линейно-изменяющегося напряжения на выходе
ГПН Un с напряжением управления Uy (рис. 23, г). В тот момент времени, когда они срав-
няются, на выходе нульоргана НО появляется сиг-нал, который через усилитель
мощности УМ подается на вход формирователя импульсов управления ФИ (рис. 23, д).
По условиям защиты от помех и расширения зоны регулирования угла (а > 150°)
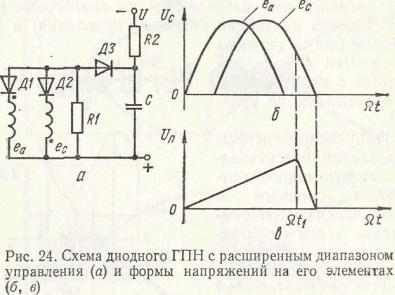
синхронизация системы управления с сетью проще осуществляется устройством синхронизации УС, выполненным на основе диодного генератора. Схема диодного генератора с расширенным диапазоном управления угла а показана на рис. 24, а.
Достоинство приведенной схемы — нечувствительность к высокочастотным пульсациям напряжения сети. Здесь напряжение ГПН снимается с конденсатора С, который заряжается от источника постоянного напряжения с момента перехода через нуль напряжения es до момента tlt когда напряжения ес и на конденсаторе Ua будут равны (рис. 24, б). Синхронизация работы схемы управления е контролем перехода напряжения сети через нуль приводит к необходимости формирования импульса управления длительностью больше (р. Угол ср в режиме холостого хода двигателя на естественной характеристике приближается к я/2. Следовательно, длительность импульса управления также должна быть не менее 0,005 с. При конечном значении индукции, когда еще не наступает насыщение стали, нужно пропорционально длительности импульса увеличить или площадь сечения сердечника, или количество витков обмотки, что приводит к увеличению габаритных размеров импульсного трансформатора. Требуемые габаритные размеры трансформатора можно снизить модуляцией выходного импульса сигналом высокой частоты и применением схемы, позволяющей перемагничивать трансформатор
250