

УстрАСУ / Конспект УАСУ
.pdf301 moteur asynchrone a cage commande par contacteur statique,—С. г. Acad. sci., 1979, AB 288, N 17, p. 274-280.
59. Variable Speed a. c. drives.— Power and Works bng, 1978, N 18, p. 23.
60.Wechselstromsielles гиг Drehzahlregulung von Asynchron-motoren.— Ind— Anz., 1979, N 13, s. 17.
61.Wehrmann С Reguiung von Drehstrommotoren nach dern Spannungssteller—und Umrichterverfahren.— Ind. und Masch. Rept. Int, 1979, N 2 s. 38—42.
ОГЛАВЛЕНИЕ |
|
|
|
|
|
|
Стр. |
|
|
|
|
|
|
Предисловие ..................... |
|
3 |
|
|
|
|
Глава первая. |
Способы |
регулирования скорости асинхронного |
двигателя |
|||
................... |
б |
|
|
|
|
|
1. |
Электрические потери в асинхронном двигателе ... |
5 |
|
|||
2. |
Классификация способов регулирования скорости |
12 Глава вторая. |
||||
Асинхронный электропривод с ТРИ статора 18 |
|
|
|
|||
1. |
Схемы и основные параметры ТРН ........ |
18 |
|
|
||
2. |
Несимметричный электропривод с ТРН....... |
29 |
|
|
||
3. |
Расчет потерь, выбор двигателя в системе ТРН—АД . |
36 |
|
|||
4. |
Расчет механических |
характеристик........ |
44 |
|
|
|
5. |
Формирование переходных режимов ........ |
47 |
|
|
||
6. |
Построение систем управления тиристорами..... |
53 |
|
|
||
Глава третья. Асинхронный электропривод с ТРТ ротора |
58 |
|
||||
1. |
Регуляторы тока ротора с естественной и искусственной коммутацией тиристоров |
|||||
............. |
58 |
|
|
|
|
|
2. |
Электрические потери в двигателе ......... |
68 |
|
|
||
3. |
Расчет механических |
характеристик ........ |
71 |
|
|
|
4. |
Формирование электромагнитного момента двигателя в переходных режимах |
|||||
............... |
75 |
|
|
|
|
|
Глава четвертая. Замкнутые системы асинхронного тирис- |
|
|
||||
торного электропривода |
................ 81 |
|
|
|
||
1. |
Особенности |
работы замкнутых систем ....... |
81 |
|
|
|
2. |
Датчики обратной связи для электропривода с ТРН |
86 |
|
|||
3. |
Датчики обратной связи для электропривода с ТРТ |
94 |
|
|||
4. |
Устойчивость асинхронного электропривода |
при параметрическом |
управлении |
|||
301

|
|
|
|
|
|
|
|
|
|
302 |
............. |
96 |
|
|
|
|
|
|
|
|
|
Глава пятая. |
Работа тирисгорного |
электропривода с механизмом |
....................... |
|||||||
106 |
|
|
|
|
|
|
|
|
|
|
1. |
Гармонические составляющие момента |
при работе асинхронного двигателя с |
||||||||
ТРН статора......... |
106 |
|
|
|
|
|
|
|
|
|
2. |
Гармонические составляющие момента при |
работе |
асинхронного двигателя с |
|||||||
ТРТ ротора .......... |
115 |
|
|
|
|
|
|
|
|
|
3. |
Динамические |
нагрузки |
в |
кинематических |
звеньях |
механизма |
||||
...................... |
120 |
|
|
|
|
|
|
|
|
|
Глава шестая. |
Применение |
асинхронного |
электропривода |
|
||||||
с тиристорным управлением |
.............. |
|
125 |
|
|
|
|
|||
1. |
Сравнительный |
|
анализ |
систем |
электропривода'с параметрическим |
|||||
управлением.............. |
125 |
|
|
|
|
|
|
|
|
|
2. |
Примеры схем электроприводов с параметрическим управлением |
..................... |
||||||||
130 |
|
|
|
|
|
|
|
|
|
|
3. |
Наладка |
асинхронных |
тиристорных |
электроприводов |
140 Список |
|||||
литературы.................. |
145 |
|
|
|
|
|
|
|
|
|
ЛЕКЦИЯ 30. СИНХРОННЫЕ МАШИНЫ (СМ)
7.1.ЭЛЕМЕНТЫ ТЕОРИИ РАБОЧЕГОПРОЦЕССА СМ
Всистемах генерирования переменного тока стабильной и переменной частоты на самолетах в качестве главных генераторов переменного тока используются синхронные генераторы (СГ). В приводах механизмов и приборов с постоянной частотой вращения используются синхронные двигатели (СД). Для синхронной передачи вращения с одного вала на другой без механической связи (например, внутрь тонкостенного трубопровода с топливом или агрессивной средой) используются синхронные муфты.
Для СМ, включая специальные электродвигатели, характерная для них жесткая связь
между частотой вращения ротора п и синхронной частотой вращения поля может быть
может быть
определена соотношением |
где |
— постоянный |
для определенного типа |
|
синхронной машины коэффициент редукции (в большинстве |
случаев |
). |
||
Теория СМ разработана достаточно детально. Наиболее общим подходом исследования является метод, основанный на общих уравнениях динамики СМ, которые следуют из уравнений обобщенного ЭМП.
302

303
Вначале упрощенно, не используя общие уравнения динамики ЭМП, рассмотрим некоторые особенности установившегося режима СМ.
Основной магнитный поток возбуждения в классических СМ имеет радиальное направление, жестко связан с индуктором и при вращении создает вращающееся относительно якоря магнитное поле с частотой вращения ротора.
в классических СМ имеет радиальное направление, жестко связан с индуктором и при вращении создает вращающееся относительно якоря магнитное поле с частотой вращения ротора.
При вращении индуктора относительно якоря в каждой фазе обмотки СГ при разомкнутых якорных выводах (XX генератора) согласно закону электромагнитной индукции наводится ЭДС XX, мгновенное значение которой определяется соотношением
где |
|
|
— |
число |
фаз |
обмотки |
якоря; |
|||
|
— потокосцепление |
k-й |
фазы |
|
обмотки с потоком |
|||||
обмотки возбуждения |
при |
холостом |
ходе; |
— взаимная |
||||||
индуктивность между |
фазой |
|
|
|
|
|
|
|||
якорной |
обмотки |
и обмоткой |
возбуждения; |
|
— ток |
|||||
возбуждения. |
|
|
|
|
|
|
|
|
|
|
Взаимная |
индуктивность |
|
является периодической |
|||||||
функцией |
угла |
(рис. 7.1): |
|
|
|
|
|
|
|
|
В установившемся |
режиме |
работы |
|
при |
|
и |
||||
из (7.1) с учетом (7.2) получаем: |
|
|
|
|
|
|
||||
Таким образом, в синхронных генераторах основная ЭДС взаимоиндукции обмотки якоря возникает в результате периодического изменения взаимной индуктивности между обмотками возбуждения и якоря при их относительном перемещении. Из этого положения вытекает принципиальная возможность создания синхронных машин с электромагнитным возбуждением, не имеющих скользящих щеточных контактов. Это так называемые бесконтактные, или бесщеточные машины. Действительно, в традиционных синхронных машинах (рис. 7.1) взаимная индуктивность MkB изменяется по периодическому закону в силу периодического изменения положения магнитных осей обмоток при вращении
ротора. Такого же эффекта и изменения в соответствии с (7.2) можно добиться при неподвижном положении обмоток относительно друг друга, но при периодическом изменении магнитной проводимости на пути магнитного потока возбуждения, сцепляющегося с фазами обмотки якоря.
в соответствии с (7.2) можно добиться при неподвижном положении обмоток относительно друг друга, но при периодическом изменении магнитной проводимости на пути магнитного потока возбуждения, сцепляющегося с фазами обмотки якоря.
Основные электромагнитные процессы в классических и бесконтактных СМ аналогичны, а особенности бесконтактных СМ будут рассмотрены отдельно.
7.1.1. РЕАКЦИЯ ЯКОРЯ В СМ
Прежде чем перейти к уравнениям СМ рассмотрим кратко фундаментальное в теории СМ (как и других типов ЭМ) понятие реакции якоря. Под реакцией якоря понимают воздействие, или влияние МДС обмотки якоря на результирующий магнитный поток рабочего зазора Реакция якоря проявляется в том, что при нагрузке СМ результирующий магнитный поток в воздушном зазоре
Реакция якоря проявляется в том, что при нагрузке СМ результирующий магнитный поток в воздушном зазоре и форма кривой распределения индукции отличаются от потока и распределения магнитной индукции в режиме XX при
и форма кривой распределения индукции отличаются от потока и распределения магнитной индукции в режиме XX при
303

304
неизменной МДС возбуждения. В синхронных генераторах реакция якоря является основной причиной того, что напряжение в режиме нагрузки значительно отличается от напряжения
в режиме нагрузки значительно отличается от напряжения в режиме XX при неизменной МДС возбуждения и постоянной частоте вращения.
в режиме XX при неизменной МДС возбуждения и постоянной частоте вращения.
В синхронных двигателях реакция якоря проявляется в том, что магнитный поток и форма кривой распределения индукции при неизменной МДС возбуждения зависят от внешнего момента на валу (нагрузки) и связанного с ним тока якоря.
и форма кривой распределения индукции при неизменной МДС возбуждения зависят от внешнего момента на валу (нагрузки) и связанного с ним тока якоря.
Рассмотрим это явление на примере СГ, а в дальнейшем покажем, что ряд характерных параметров, связанных с явлением реакции якоря, в равной мере играет существенную роль в электромагнитных процессах как в СГ, так и в СД. Именно общность ряда параметров СМ независимо от режима работы (генератор, двигатель) обусловливает распространение понятия реакции якоря и на СД с возбужденным и невозбужденным ротором. Явление реакции якоря в СГ рассмотрим на примере явнополюсной СМ с вращающимся индуктором и неподвижным якорем-статором, так как и в других типах СГ
качественно реакция якоря проявляется аналогично. |
|
|
При симметричной смешанной нагрузке СГ МДС -фазной (в частности, |
) |
|
обмотки |
якоря, обтекаемой системой |
|
/га-фазных |
переменных токов, |
|
где — угол сдвига фаз между ЭДС XX и током, определяется известным из теории МДС обмоток переменного тока соотношением
— угол сдвига фаз между ЭДС XX и током, определяется известным из теории МДС обмоток переменного тока соотношением
где |
— максимальное в пространстве значение |
|
первой гармоники МДС m-фазной обмотки на один полюс; |
— число витков в |
|
фазе (эффективное); р — число пар полюсов; х — текущая линейная координата перемещения МДС по развертке длины окружности якоря; — полюсное деление. Из уравнения
— полюсное деление. Из уравнения
положение в пространстве максимума МДС обмотки якоря, которое зависит от времени и угла
и угла между ЭДС XX
между ЭДС XX и током
и током (в зависимости от характера нагрузки), определяется как
(в зависимости от характера нагрузки), определяется как
Таким |
образом, |
МДС |
якоря |
определяемая |
соотношением (7.5), вращается с угловой скоростью |
||||
синхронно с |
индуктором, т. е. |
с МДС обмотки |
||
возбуждения  При этом пространственный угол между пространственными векторами
При этом пространственный угол между пространственными векторами и
и
 , неподвижными относительно друг друга, при синхронном вращении (рис. 7.2) изменяется в зависимости от характера нагрузки в пределах
, неподвижными относительно друг друга, при синхронном вращении (рис. 7.2) изменяется в зависимости от характера нагрузки в пределах  При
При  (чисто
(чисто
индуктивная нагрузка, ток отстает от ЭДС на противонаправлена по отношению к
противонаправлена по отношению к
304

|
|
305 |
и реакция якоря проявляется в виде размагничивающего эффекта. При |
(чисто |
|
емкостная нагрузка, ток опережает ЭДС на ) |
по направлению совпадают, и |
|
реакция якоря проявляется в виде подмагничивающего эффекта. При |
(чисто |
|
активная нагрузка, ток по фазе совпадает с ЭДС) |
в пространстве ортогональны, и |
|
реакция якоря проявляется в виде искажения картины магнитного поля, не оказывая непосредственно подмагничивающего и размагничивающего воздействия, если магнитная цепь не насыщена. Очевидно, что в явнополюсной машине с изменением угла будет
будет
изменяться магнитное |
сопротивление |
на |
пути |
магнитного |
потока |
|||
определяемого |
МДС |
якоря |
.При МДС |
, не |
зависящей |
от |
угла |
магнитный |
поток |
будет |
различным |
в |
зависимости |
от |
переменной |
||
величины |
связанной с переменным воздушным зазором на пути потока |
, В этом |
||||||
случае при количественном анализе необходимо вводить переменное магнитное сопро-
тивление |
изменяющееся по сложному закону в функции г|э, что весьма затрудняет |
|||||||||
получение количественных соотношений. |
|
|
|
|
|
|
|
|
|
|
|
Для упрощения анализа взаимодействия между МДС воз- |
|||||||||
|
буждения |
и МДС якоря |
используют метод двух реак- |
|||||||
|
ций: МДС якоря |
разлагают на две ортогональные в про- |
||||||||
|
странстве составляющие — продольную и поперечную. На |
|||||||||
|
рис. 7.3 обозначены оси , по развертке машины (nD) и |
|||||||||
|
показано разложение МДС якоря |
на две составляющие |
||||||||
|
при |
(нагрузка активно-индуктивного характера) и |
||||||||
|
при |
(нагрузка активно-емкостного характера). |
При |
|||||||
|
этом учитывается, что ЭДС холостого хода |
отстает от |
||||||||
|
потока |
на |
. |
Из |
рис. |
7.3 |
следует, что |
|
|
|
|
а |
|
|
|
. |
Делением |
продольной - |
и |
||
|
поперечной |
МДС |
якоря на |
величину |
можно |
|||||
|
получить выражения вида |
|
|
|
|
|
||||
|
Токи |
понимаются |
как продольный и |
поперечный |
||||||
|
токи 'якоря, |
создающие |
соответственно |
продольную |
||||||
|
и поперечную |
МДС |
якоря. Эти токи являются |
|||||||
|
фиктивными (расчетными), как и МДС |
|
и |
|||||||
|
составляют часть полного фазного тока |
|
|
|||||||
|
Нетрудно видеть, что при отстающем |
токе |
(при |
|||||||
активно-индуктивном характере нагрузки) |
продольная МДС |
якоря |
направлена |
|||||||
встречно по отношению к и размагничивает магнитную систему, а при опережающем токе (при активно-емкостном характере нагрузки)
и размагничивает магнитную систему, а при опережающем токе (при активно-емкостном характере нагрузки)  совпадает по направлению с
совпадает по направлению с  и подмагничивает магнитную систему генератора. В методе двух реакций магнитные
и подмагничивает магнитную систему генератора. В методе двух реакций магнитные
потоки, обусловенные соответственно МДС |
и , определяются постоянными (без |
|
учета насыщения магнитной цепи) магнитными сопротивлениями |
что позволяет |
|
достаточно просто производить количественный учет для компенсации реакции якоря, если МДС привести к единому масштабу. Для количественного учета реакции якоря с целью компенсации размагничивающего или подмагничивающего действия реакции якоря соответствующим изменением МДС возбуждения (тока возбуждения) необходимо знать, какая МДС якоря эквивалентна некоторому значению МДС возбуждения. Другими словами, необходимо составляющие МДС якоря привести к масштабу МДС возбуждения, что осуществляется посредством коэффициентов приведения
привести к единому масштабу. Для количественного учета реакции якоря с целью компенсации размагничивающего или подмагничивающего действия реакции якоря соответствующим изменением МДС возбуждения (тока возбуждения) необходимо знать, какая МДС якоря эквивалентна некоторому значению МДС возбуждения. Другими словами, необходимо составляющие МДС якоря привести к масштабу МДС возбуждения, что осуществляется посредством коэффициентов приведения
МДС якоря к МДС возбуждения по продольной и поперечной осям |
которые |
||
называют также коэффициентами реакция якоря. Если обозначить через |
МДС |
||
возбуждения, эквивалентные по своему действию |
то |
|
|
Коэффициенты |
зависят от формы кривых |
распределения магнитных полей |
|
305
306
поперечной и продольной реакции якоря  и поля возбуждения
и поля возбуждения В явнополюсных СМ
В явнополюсных СМ . В неявнополюсных СМ
. В неявнополюсных СМ  в силу равенства магнитных сопротивлений
в силу равенства магнитных сопротивлений  для потока якоря при любом
для потока якоря при любом Чтобы скомпенсировать действие реакции якоря, необходимо при нагрузке генератора током
Чтобы скомпенсировать действие реакции якоря, необходимо при нагрузке генератора током так изменить МДС обмотки возбуждения, чтобы магнитный поток воздушного зазора при холостом ходе
так изменить МДС обмотки возбуждения, чтобы магнитный поток воздушного зазора при холостом ходе был равен магнитному потоку
был равен магнитному потоку при нагрузке. МДС возбуждения нагруженного генератора для
при нагрузке. МДС возбуждения нагруженного генератора для  при
при
 соответственно неявнополюсной и явнополюсной СМ определяется как
соответственно неявнополюсной и явнополюсной СМ определяется как
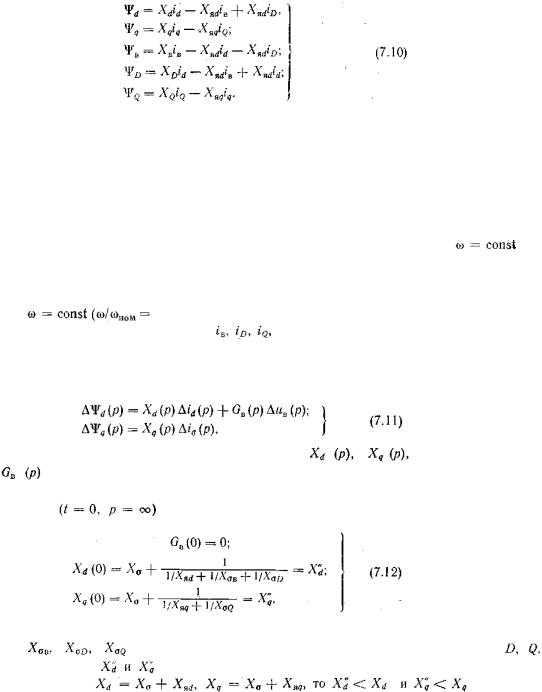
Поперечная реакция якоря может оказывать размагничивающее действие лишь при насыщенной магнитной системе, когда при поперечном направлении МДС якоря подмагничивание одного края полюса в соответствии с нелинейной кривой намагничивания стали происходит в меньшей степени, чем размагничивание другого края полюса. На рис. 7.4 представлена картина распределения токов якоря, потоков и взаимное расположение первых гармоник поля возбуждения и поля якоря. Если при синхронном вращении рассматривать момент времени, когда ток в одной из фаз достигает максимума, то ось результирующей МДС якоря от всех фаз совпадает с осью этой фазы. Это положение и позволяет заменить  фаз одной эквивалентной фазой, представленной на рис. 7.4, в которой ток достигает максимума. При этом весьма наглядно можно проследить действие реакции якоря при различном характере нагрузки.
фаз одной эквивалентной фазой, представленной на рис. 7.4, в которой ток достигает максимума. При этом весьма наглядно можно проследить действие реакции якоря при различном характере нагрузки.
Реакция якоря определяет так называемые синхронные параметры синхронных машин.
Применяя принцип наложения, можно считать, что потоки
 неявнополюсной и явнополюсной СМ наводят в обмотке якоря ЭДС,
неявнополюсной и явнополюсной СМ наводят в обмотке якоря ЭДС,
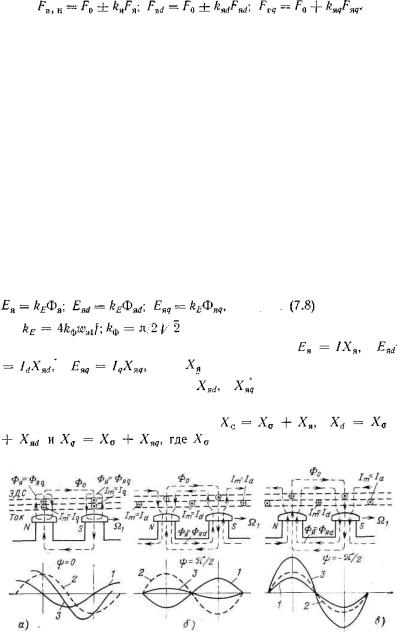
действующее значение первых гармоник которых определяются соотношениями:
где |
|
— коэффициент формы кривой (синусоидальной). |
|
||
Без учета насыщения |
магнитной |
цепи |
= |
|
|
|
где |
— индуктивное |
сопротивление реакции |
якоря |
|
неявнополюсной |
машины; |
— индуктивные сопротивления реакции якоря по |
|||
продольной и поперечной осям явнополюсной машины. |
|
||||
Индуктивные |
сопротивления |
|
+ |
|
|
|
|
— индуктивное сопротивление |
|
||
Рис. 7.4. Картина распределения токов якоря и магнитных потоков при активной (а), индуктивной (б) и емкостной (в) нагрузках.
/ — первая гармоника поля якоря; 2 — первая гармоника поля возбуждения; 3 — результирующее поле.
рассеяния обмотки якоря, называют синхронными индуктивными сопротивлениями
306
307
неявнополюсной и явнополюсной СМ по продольной и поперечной осям (продольное и поперечное синхронные индуктивные сопротивления). Физический смысл синхронных индуктивных сопротивлений можно объяснить, исходя из следующего воображаемого опыта. Обмотку якоря СМ подключают к трехфазной сети переменного тока, в результате чего создается вращающееся с угловой скоростью магнитное поле якоря
магнитное поле якоря Невозбужденный индуктор вращают синхронно с полем. Если магнитный поток якоря замыкается по продольной оси машины
Невозбужденный индуктор вращают синхронно с полем. Если магнитный поток якоря замыкается по продольной оси машины  , то СМ при пренебрежении активным сопротивлением обмотки якоря
, то СМ при пренебрежении активным сопротивлением обмотки якоря  для сети будет представлять собой индуктивное сопротивление
для сети будет представлять собой индуктивное сопротивление  а ток, потребляемый из сети, будет продольным током Если поток якоря замыкается по поперечной оси
а ток, потребляемый из сети, будет продольным током Если поток якоря замыкается по поперечной оси
 , то СМ для сети будет являться индуктивным сопротивлением
, то СМ для сети будет являться индуктивным сопротивлением , а ток, потребляемый из сети, — поперечным током
, а ток, потребляемый из сети, — поперечным током Поскольку индуктивные сопротивления пропорциональны магнитным проводимостям, а в явнополюсной машине магнитная проводимость по продольной оси больше, чем по поперечной то
Поскольку индуктивные сопротивления пропорциональны магнитным проводимостям, а в явнополюсной машине магнитная проводимость по продольной оси больше, чем по поперечной то , Очевидно, что в неявнополюсных СМ
, Очевидно, что в неявнополюсных СМ
Выяснив физический смысл синхронных индуктивных сопротивлений, связанных с явлением реакции якоря, нетрудно видеть, что эти параметры присущи любой СМ, независимо от режима ее работы: генератор, двигатель с возбужденным или невозбужденным ротором. В этом заключается общность в проявлении реакции якоря всех типов СМ, хотя количественное выражение этих параметров и их соотношение существенно зависят от конкретного типа СМ.
7.1.2. УРАВНЕНИЯ ДИНАМИКИ СМ
Уравнения динамики описывают переходные процессы, частным случаем которых является установившийся режим. Для СМ эти уравнения получаются как частный случай общих уравнений, описывающих процессы ЭМП.
Для того чтобы избавиться от периодических коэффициентов и тем самым упростить систему дифференциальных уравнений ЭМП, как показано в гл. 3, их записывают в системе ортогональных — координат, или, как говорят, преобразуют к осям
— координат, или, как говорят, преобразуют к осям Для синхронных машин это преобразование впервые было выполнено Парком и Горевым. Система преобразованных уравнений СМ, не содержащих периодических коэффициентов (уравнения с постоянными коэффициентами),получила название уравнений Парка—Горева. В СМ ортогональные оси
Для синхронных машин это преобразование впервые было выполнено Парком и Горевым. Система преобразованных уравнений СМ, не содержащих периодических коэффициентов (уравнения с постоянными коэффициентами),получила название уравнений Парка—Горева. В СМ ортогональные оси  к которым преобразуются исходные уравнения, совпадают с продольной и поперечной осями, используемыми в изложенном выше методе двух реакций.
к которым преобразуются исходные уравнения, совпадают с продольной и поперечной осями, используемыми в изложенном выше методе двух реакций.
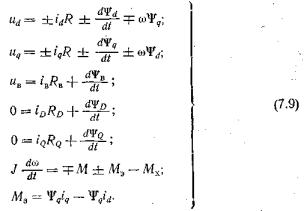
Уравнения синхронной машины в координатах, описывающие переходные электромагнитные и электромеханические процессы (уравнения Парка—Горева), имеют вид:
координатах, описывающие переходные электромагнитные и электромеханические процессы (уравнения Парка—Горева), имеют вид:
307
308
Верхние знаки в (7.9) относятся к двигательному, а нижние — к генераторному режимам работы. Индексы относятся к якорной цепи по
относятся к якорной цепи по  -осям, а «в»,
-осям, а «в»,  — к обмотке возбуждения и демпферной обмотке по осям
— к обмотке возбуждения и демпферной обмотке по осям
Обычно параметры обмотки возбуждения и демпферной обмотки приводят к числу витков обмотки якоря подобно тому, как это делается для трансформаторов. Кроме того, уравнения представляют в относительной безразмерной форме, выбирая соответствующим образом базисные напряжение, ток, потокосцепление и сопротивление, а дифференцирование производят по так называемому синхронному времени При этом потокосцеп-ления в уравнениях (7.9), которые в относительной форме сохраняют тот же вид, выражаются как
При этом потокосцеп-ления в уравнениях (7.9), которые в относительной форме сохраняют тот же вид, выражаются как
Уравнения (7.9) и (7.10) представляют собой полную систему нелинейных дифференциальных уравнений с постоянными ■ коэффициентами, которые описывают динамику СМ. Эти уравнения содержат нелинейности типа
При они становятся линейными, а уравнение движения ротора
они становятся линейными, а уравнение движения ротора  выпадает из рассмотрения в динамике, так как в этом случае не является дифференциальным.
выпадает из рассмотрения в динамике, так как в этом случае не является дифференциальным.
На основе (7.9), (7.10) строятся математические модели СМ для исследования
динамики с помощью ЭВМ, а некоторые частные задачи при |
доступны |
аналитическим методам решения. |
|
Характер переходных процессов в СМ определяется так называемыми переходными и
сверхпереходными |
индуктивными |
сопротивлениями, которые получаются из (7.9) |
при |
|
|
= 1). Если из (7.9) |
исключить |
представляя (7.9) в области изображений по |
Лапласу с нулевыми начальными условиями (токи, напряжения, потокосцепления представляются в отклонениях от их значений в исходном установившемся режиме:  , то из (7.9) и (7.10) в области изображений по Лапласу можно получить:
, то из (7.9) и (7.10) в области изображений по Лапласу можно получить:
где коэффициенты |
операторных выражений |
|
|
|
определяются |
активными |
и |
индуктивными |
сопротивлениями всех |
индуктивно связанных обмоток машины, входящих в (7.9) и |
(7.10). Их начальные |
|||
значения |
равны: |
|
|
|
где |
— индуктивные сопротивления |
рассеяния обмоток «в», |
Параметры |
называют сверхпереходными |
индуктивными сопротивлениями. |
Поскольку |
|
Если |
демпферная обмотка отсутствует, то
308

309
Параметр |
называют переходным индуктивным сопротивлением, |
причем, очевидно, |
|
|
В |
установившемся |
режиме |
В переходных процессах (внезапное КЗ генератора, наброс нагрузки и т. п.) оригиналы операторных коэффициентов
 мотонно возрастают во времени
мотонно возрастают во времени в пределах
в пределах , При наличии демпферной обмотки в некоторый момент времени
, При наличии демпферной обмотки в некоторый момент времени (несколько периодов переменного тока)
(несколько периодов переменного тока)
свободная составляющая тока в демпферной обмотке затухает до нуля вследствие рассеяния энергии в
 . При этом .
. При этом . Оригиналы
Оригиналы  можно представить в виде:
можно представить в виде:
где |
|
— сверхпереходные |
постоянные времени |
||
(несколько |
периодов |
переменного тока); |
«=; |
— переходная постоянная |
|
времени |
(десятки |
периодов |
переменного |
тока). |
Количественно |
Параметры  определяют всплески токов и электромагнитного момента при внезапном КЗ генератора, которые многократно превышают номинальные значения. Эти же параметры определяют начальный нерегулируемый спад напряжения при набросе нагрузки на генератор. Начальная стадия этого процесса является нерегулируемой по той
определяют всплески токов и электромагнитного момента при внезапном КЗ генератора, которые многократно превышают номинальные значения. Эти же параметры определяют начальный нерегулируемый спад напряжения при набросе нагрузки на генератор. Начальная стадия этого процесса является нерегулируемой по той
причине, что  Это означает, что на начальной стадии (интервал времени в несколько периодов переменного тока) реакция цепи якоря на изменение напряжения возбуждения
Это означает, что на начальной стадии (интервал времени в несколько периодов переменного тока) реакция цепи якоря на изменение напряжения возбуждения равна нулю: скачкообразное изменение
равна нулю: скачкообразное изменение не приводит к мгновенному изменению потокосцепления
не приводит к мгновенному изменению потокосцепления  и, следовательно, не может изменить ЭДС и напряжение.
и, следовательно, не может изменить ЭДС и напряжение.
7.1.3. |
ДИАГРАММЫ |
НАПРЯЖЕНИЙ |
СМ |
В |
СИММЕТРИЧНОМ |
|
УСТАНОВИВШЕМСЯ РЕЖИМЕ |
|
|
|
|
||
Уравнение |
установившегося |
режима |
СМ |
следует |
из |
общей системы (7.9) |
при |
|
|
|
|
|
|
= |
что |
означает |
отсутствие |
|
трансформаторных |
|
электромагнитных связей между обмотками и постоянство частоты вращения. При этом уравнения электрического равновесия принимают вид:
где — амплитудные значения фазных напряжений и тока.
— амплитудные значения фазных напряжений и тока.
Уравнение цепи возбуждения не представляет интереса, а напряжения псевдонеподвижных обмоток с учетом выражений потокосцеплений (7.10)
при  принимают вид:
принимают вид:
309

|
|
310 |
где |
— амплитудное значение фазной ЭДС XX, наведенной потоком XX |
|
созданным установившимся значением тока возбуждения (при |
. Если |
|
каждую из составляющих (7.15) в масштабе напряжения представить вектором в осях  , то мы получим диаграмму напряжений в пространственных осях
, то мы получим диаграмму напряжений в пространственных осях . Для генераторного режима при активно-индуктивном характере нагрузки в соответствии с (7.14) и (7.15) она представлена на рис. 7.5, а, б. Здесь же показано принятое положительное направление осей
. Для генераторного режима при активно-индуктивном характере нагрузки в соответствии с (7.14) и (7.15) она представлена на рис. 7.5, а, б. Здесь же показано принятое положительное направление осей  и токов. Из рис. 7.5, б следует, что при активноиндуктивном характере нагрузки напряжение
и токов. Из рис. 7.5, б следует, что при активноиндуктивном характере нагрузки напряжение меньше ЭДС холостого хода .
меньше ЭДС холостого хода . за счет падения напряжения в
за счет падения напряжения в . Непосредственно на диаграмме напряжений действие реакции якоря можно выяснить, если (7.15) для генераторного режима представить в виде
. Непосредственно на диаграмме напряжений действие реакции якоря можно выяснить, если (7.15) для генераторного режима представить в виде
Уравнениям (7.15) при активно-индуктивном характере нагрузки соответствует диаграмма напряжений, приведенная на рис. 7.5, в. Падения напряжений в правых частях (7.16) по модулю равны соответствующим ЭДС:
равны соответствующим ЭДС:
 и наводятся соответственно потоками якоря
и наводятся соответственно потоками якоря  а ЭДС рассеяния
а ЭДС рассеяния — потоком рассеяния
— потоком рассеяния
Рис. 7.5. Диаграммы напряжений синхронного генератора при активно-индуктивном характере нагрузки. а, бв в — в пространственных осях г — в комплексной плоскости.
г — в комплексной плоскости.
Как известно, уравнения электрического равновесия цепей переменного тока представляют в комплексных величинах, а соответствующие им векторные диаграммы — на комплексной плоскости. Диаграммы напряжений СМ также можно представить на комплексной плоскости, которые называют векторными диаграммами СМ. Теоретически связь между токами и напряжениями в -координатах и комплексными векторами токов и напряжений показана в гл. 3. Комплексные оси можно совместить на. плоскости с осями
-координатах и комплексными векторами токов и напряжений показана в гл. 3. Комплексные оси можно совместить на. плоскости с осями Это сделано на рис. 7.5, г, где представлены векторы комплексных величин (7.16), причем с осью
Это сделано на рис. 7.5, г, где представлены векторы комплексных величин (7.16), причем с осью совмещена положительная мнимая ось, а с
совмещена положительная мнимая ось, а с
осью — положительная действительная. Диаграмма рис. 7.5, г объясняет то обстоятельство, что на рис. 7.4,б и в векторы
— положительная действительная. Диаграмма рис. 7.5, г объясняет то обстоятельство, что на рис. 7.4,б и в векторы направлены по продольной оси, а векторы
направлены по продольной оси, а векторы
310