

УстрАСУ / Конспект УАСУ
.pdf201
Если принять  получится уравнение идеализированной механической характеристики:
получится уравнение идеализированной механической характеристики:
(8.27)
Семейство характеристик (8.27)  представлено на рис. 8.21. При t1 * =var можно изменять частоту вращения. Снижение n* при возрастании М практически не сопровождается увеличением потерь и нагрева якоря: при управлении по осредством импульсов повышенной частоты разли
представлено на рис. 8.21. При t1 * =var можно изменять частоту вращения. Снижение n* при возрастании М практически не сопровождается увеличением потерь и нагрева якоря: при управлении по осредством импульсов повышенной частоты разли
чие между U и Е компенсируется в основном ЭДС самоиндукции, а не падением напряжения в цепи якоря. Схема имеет высокие энергетические показатели.
Реально частота f < и время импульсов и пауз не бесконечно мало. Поэтому при небольших нагрузках ток в цепи якоря будет прерывистым (пунктирные участки характеристик на рис. 8.21 для режимов Мэ 0). С целью реверсирования двигателей, а также их электрического торможения применяются более сложные мостовые схемы с транзисторами.
ЛЕКЦИЯ 26. ТАХОМЕТРИЧЕСКИЕ ГПТ И ВЕНТИЛЬНЫЕ (БЕСКОНТАКТНЫЕ) МПТ
Тахогенераторы применяются в качестве датчиков частоты вращения п в автоматических устройствах постоянного тока. Они преобразуют угловую скорость
 вала исполнительного механизма в электрический сигнал. В следящих системах тахометрические ГПТ используются как дифференцирующие элементы, вырабатывающие сигнал в виде функции производной d /dt угла поворота вала. При подключении элементов RС-цепи
вала исполнительного механизма в электрический сигнал. В следящих системах тахометрические ГПТ используются как дифференцирующие элементы, вырабатывающие сигнал в виде функции производной d /dt угла поворота вала. При подключении элементов RС-цепи
на выходе ГПТ он может служить датчиком угловых ускорений акселерометром. Для установившегося режима согласно (8.2) напряжение
 . Если пренебречь реакцией якоря (Ф=const) при нагрузке, то в идеальном случае:
. Если пренебречь реакцией якоря (Ф=const) при нагрузке, то в идеальном случае:
Реально:
следовательно, относительная погрешность:
201

202
Для уменьшения  необходимо повышать Rн и сужать диапазон измерения n. Выходные характеристики тахогенератора показаны на рис. 8.22. Погрешность
необходимо повышать Rн и сужать диапазон измерения n. Выходные характеристики тахогенератора показаны на рис. 8.22. Погрешность
 сравнительно невелика. Достоинство тахометрического ГПТ состоит в отсутствии фазовой погрешности выходного сигнала. Дополнительные погрешности обусловливаются пульсациями потока из-за зубчатого строения якоря и изменениями U вследствие коллекторных пульсаций напряжения при замыкании щетками накоротко коммутирующих секций обмотки.
сравнительно невелика. Достоинство тахометрического ГПТ состоит в отсутствии фазовой погрешности выходного сигнала. Дополнительные погрешности обусловливаются пульсациями потока из-за зубчатого строения якоря и изменениями U вследствие коллекторных пульсаций напряжения при замыкании щетками накоротко коммутирующих секций обмотки.
В тахогенераторах постоянного тока. Выходные характеристика с возбуждением от постоянных магнитов температурная погрешность мала.
Построим передаточные функции тахогенератора на основании (8.2) при  по частоте вращения:
по частоте вращения:
по углу поворота вала
Здесь |
|
С |
целью понижения Т надо выбирать большие Rн |
и снижать L. В тахогенераторах |
|
специального исполнения с немагнитными полым цилиндрическим |
или дисковым |
|
якорями, а также с гладким беззубцовым якорем параметры L и |
Т малы. Если |
|
8.9. ВЕНТИЛЬНЫЕ (БЕСКОНТАКТНЫЕ) МПТ
Современные вентильные МПТ представляют собой специально объединенные
202
203
бесконтактные синхронные машины и полупроводниковые коммутаторы. В генераторном режиме обычно применяются неуправляемые коммутаторы — многофазные выпрямители, а в двигательном режиме к машинам подключаются коммутаторы — инверторы, управляемые посредством датчика углового положения полюсов ротора.
Коммутаторы и обмотки якоря могут иметь совмещенное исполнение: полупроводниковое устройство не выделяется в отдельный блок, а выполняется распределенным, встроенным в корпус машины.
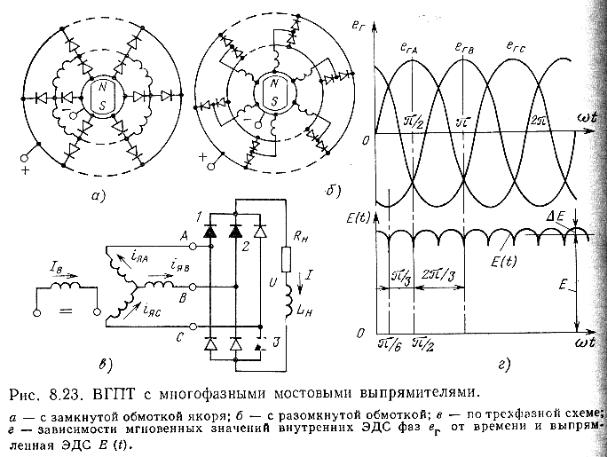
Генераторный режим. Вентильные генераторы постоянного тока (ВГПТ) изготавливаются на базе синхронных генераторов с внешнеили внутризамкнутым магнитопроводом и многофазной обмоткой якоря. При небольшой мощности ВГПТ могут выполняться как машины с возбуждением от постоянных магнитов, расположенных на роторе, или как машины с комбинированным возбуждением. Для ВГПТ повышенной мощности целесообразна классическая конструкция с явнополюсным ротором, в которой бесконтактное возбуждение осуществляется с помощью вращающихся выпрямителей индуктора и возбудителя навалу генератора. Обмотки якорей ВГПТ имеют замкнутые или разомкнутые схемы. К замкнутым по многоугольнику обмоткам (рис. 8.23, а) применима теория обмоток коллекторных МПТ. Диапазоны частоты вращения и напряжения в ВГПТ значительно шире, так как отсутствуют ограничения по условиям ухудшения электромеханической коммутации, характерные для коллекторных ГПТ. Фазы (или секции) и вентили разомкнутых обмоток ВГПТ соединяются многолучевую звезду (рис. 8.23, б). Для равномерного распределения ЭДС и токов по фазам при их параллельной работе необходимо в зазорах под полюсами распределять магнитное поле по прямоугольной кривой и выбирать диаметральный шаг обмотки. Приближение к этой форме достигается при XX в явнополюсных ВГПТ с малыми зазорами. Реакция якоря при нагрузке сильно искажает поле.
203
204
При двухполупериодном выпрямлении эквивалентом пары «коллекторная пластина — щетка» служат два последовательно соединенных вентиля, между которыми подключен вывод фазы обмотки якоря ВГПТ (рис. 8.23, а, б). Диаграмма напряжений полупроводникового коммутатора при параллельном включении вентилей к эквипотенциальным шинам, образующим анодную и катодную вентильные группы, аналогична потенциальной кривой коллектора при прямоугольной форме поля в зазоре МПТ. Если предположить, что идеализированная форма поля сохраняется и в режиме нагрузки (например, в компенсированных ВГПТ), то указанная аналогия позволяет установить следующее: 1) распределение напряжений на всех вентилях обеспечивает естественную коммутацию потенциалами фаз обмотки; открыта всегда бывает пара диаметральных вентилей, по одному из анодной и катодной групп коммутатора; 2) плоскость, в которой находятся открытые вентили, совпадает с физической нейтралью, остальные вентили ток не пропускают; 3) в отличие от коллекторных МПТ с неподвижными щетками ось МДС реакции якоря в ВГПТ не фиксирована, а перемещается при изменении нагрузки, следуя физической нейтрали. Результирующая ЭДС ВГПТ с многофазным коммутатором содержит пульсационные составляющие подобно зависимости Е=Е(t) коллекторных ГПТ. Относительная амплитуда пульсацийE/Е снижается с увеличением числа т фаз (секций) обмотки. Наименьшие пульсации достигаются при нечетном т и мостовых выпрямительных схемах. Однако с возрастанием т для ВГПТ с разомкнутыми обмотками якоря уменьшается коэффициент использования Кг расчетной мощности Sг базового генератора переменного тока:
где Р—расчетная мощность постоянного тока; Е, I—средние значения выпрямленных ЭДС и тока; Ег , Iя —действующие значения внутренней ЭДС и тока фазы якоря синхронного генератора. В частности, получается Кг 0,95 для т == 3; Кг 0,85 для m = 5, а E/Е0,03 (при XX) и U/U 0,12 (при нагрузке). Уменьшить U/U можно, разместив на статоре две трехфазные обмотки, сдвинутые в пространстве на электрический угол 30°. Мостовые выпрямители этих обмоток включены параллельно (через уравнительный реактор). При замкнутых обмотках якоря число фаз т практически не влияет на Кг. Относительная масса ВГПТ G* = G/Р (вместе с коммутатором) соизмерима с G* коллекторных МПТ. У ВГПТ КПД выше, так как потери мощности в полупроводниковом коммутаторе меньше, чем на коллекторе. Преимущественное распространение нашли ВГПТ с разомкнутыми обмотками благодаря простоте схемы и облегчению условий защиты от перегрузок при наличии нулевой точки. Проанализируем работу ВГПТ на примере машины с т=3 и выпрямителем по трехфазной мостовой схеме (рис. 8.23, в).
204
205
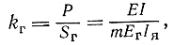
Влияние реакции якоря учитывается падением напряжения на индуктивных сопротивлениях Хq и Хд (рис. 8.24, а). Рассмотрим процесс коммутации, пренебрегая активным сопротивлением фазы Rя сопротивлением диодов в проводящем направлении. Полагаем, что в фазах действуют внутренние ЭДС При номинальном напряжении фазы ВГПТ поаналогии с СМ для первых гармоник переменных uг и iя приближенно можно принять коэффициент
Здесь |
— относительное значение индуктивного |
сопротивления рассеяния фазы |
|
Эксплуатационные характеристики ВГПТ. Зависимости F (U, I, Iв, п) = 0 имеют такой |
|
же вид, как у коллекторных ГПТ |
соответствующей схемой возбуждения. Специфика |
внешней характеристики U=f(I) при Iв, n — постоянных состоит в существенном влиянии угла у на среднее значение выпрямленного напряжения. За время интервала  это напряжение снижается по коммутационной кривой (рис. 8.24, г) под влиянием реакции якоря. В конце интервала напряжение скачком увеличивается до значения ЭДС eг соответствующей фазы. Среднее значение U для результирующей кривой рис. 8.24, г получается меньше, чем для кривой по рис. 8.23, г, не учитывающей коммутацию. Чтобы уменьшить провалы кривой напряжения, следует: проектировать генераторы с малым сопротивлением Х , что согласно (8.31) снижает у; применять компенсацию реакции якоря, например с помощью емкостей.
это напряжение снижается по коммутационной кривой (рис. 8.24, г) под влиянием реакции якоря. В конце интервала напряжение скачком увеличивается до значения ЭДС eг соответствующей фазы. Среднее значение U для результирующей кривой рис. 8.24, г получается меньше, чем для кривой по рис. 8.23, г, не учитывающей коммутацию. Чтобы уменьшить провалы кривой напряжения, следует: проектировать генераторы с малым сопротивлением Х , что согласно (8.31) снижает у; применять компенсацию реакции якоря, например с помощью емкостей.
Для кривой рис. 8.24, г трехфазной мостовой схемы (т = 3)вычисления дают:
205
206
Здесь эквивалентное сопротивление  составляет 1,5Х для интервала y и Rэ = 2Х для внекоммутационного интервала. В среднем принимается Rэ = 1.75Х . Практически U получается еще меньше на падение д напряжения на активном сопротивлении Rя и сопротивлении диодов в проводящем направлении. Заметим, что для
составляет 1,5Х для интервала y и Rэ = 2Х для внекоммутационного интервала. В среднем принимается Rэ = 1.75Х . Практически U получается еще меньше на падение д напряжения на активном сопротивлении Rя и сопротивлении диодов в проводящем направлении. Заметим, что для
ВГПТ с т == 3 и однополупериодным выпрямителем 
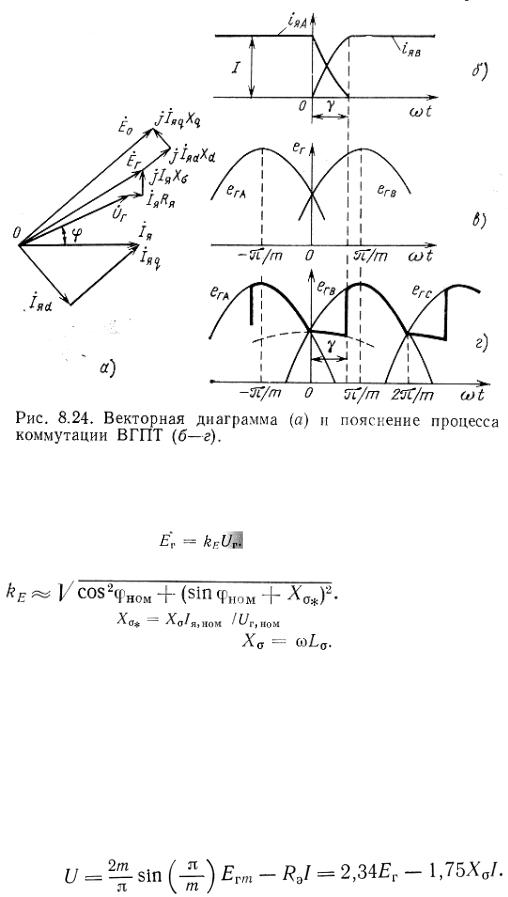
Режим электродвигателя. Вентильные (бесконтактные) двигатели постоянного тока (ВДПТ) созданы на базе СМ: с возбуждением от постоянных магнитов по классической конструктивной схеме либо с внешнеили внутризамкнутым магнитопроводом при электромагнитном возбуждении. Обмотки якоря ВДПТ имеют небольшое число фаз т < 4. Увеличение т улучшает пусковые свойства и плавность вращения ротора, но усложняет схему коммутатора. Преимущество разомкнутых обмоток перед замкнутыми состоит в уменьшении в т раз расчетного значения пускового тока для каждого полупроводникового прибора (тиристора или транзистора) коммутатора: силовой инвертор выполняется на транзисторах или (при повышенных мощностях ВДПТ) на тиристорах. Они управляются от датчика углового положения ротора (ДПР) относительно осей фаз посредством вспомогательных полупроводниковых формирователей — усилителей прямоугольных импульсов, преобразующих сигналы ДПР. Структурная схема ВДПТ дана на рис. 8.25, а. Конструктивное оформление машин на примере ВДПТ с возбуждением от постоянных магнитов поясняется рис. 8.25, б. Рабочие процессы ВДПТ подобны процессам в обращенных коллекторных ДПТ (с неподвижными якорем и коллектором, но вращающимися полюсами и щетками). При подведении постоянного напряжения к входным зажимам инвертора работа ДПР обеспечивает бесконтактное включение элементов коммутатора в такой последовательности, чтобы в секциях якоря ток имел неизменное направление в зоне данной магнитной полярности.
Коммутация. При повороте ротора на электрический угол 2 /m ДПР переключает соответствующие элементы коммутатора. В процессе переключения секции (фазы) обмотки замыкаются накоротко, происходит бесконтактная коммутация с реверсированием тока в секциях. Положение зоны коммутации многофазной обмотки определяется углом пространственного сдвига между продольной осью полюса двигателя и осью полюсов ДПР. Если =0, зона коммутации находится в геометрической нейтрали; угол <>0 аналогичен углу сдвига щеток из нейтрали в коллекторных ДПТ.
206

207
Бытродействующие транзисторы и тиристоры обеспечивают достаточно большую крутизну изменения прикладываемого к секциям напряжения. Переходный электромагнитный процесс коммутации ВДПТ определяется, как и в ВГПТ, параметрами коммутируемой цепи и вольтамперной характеристикой полупроводниковых приборов инвертора.
Реакция якоря. Характер реакции и МДС якоря ВДПТ с разомкнутыми обмотками при малом числе фаз определяются не только положением зоны коммутации (углом ), но зависят также от углового положения продольной оси полюсов при вращении ротора. Например, в четырехсекционных обмотках (рис. 8.26) при коммутации на геометрической нейтрали ( = 0) имеются продольная и поперечная составляющие МДС якоря, периодически изменяющиеся при вращении полюсов. Продольная МДС меняет знак при повороте ротора: в начале периода работы секции МДС является размагничивающей, а в конце — намагничивающей. Поперечная МДС достигает наибольшего значения в середине периода работы секции.
Существенное влияние, особенно на ВДПТ с возбуждением от постоянных магнитов, оказывает максимальное значение продольной размагничивающей МДС якоря при пуске и реверсев начале периода работы секции. Для т == 4 это значение может достигать полной МДС одной секции при наибольшем токе.
207

208
ВВДПТ с замкнутыми многофазными обмотками реакцияякоря действует, как
вобычных коллекторных ДПТ. Угол задает фиксированное положение оси МДС якоря, которое не зависит от нагрузки (в отличие от ВГПТ). Если = 0, то реакция якоря поперечная. При смещении зоны коммутации ( <> 0) появляется продольная составляющая МДС якоря. Составляющие МДС якоря влияют на работу ВДПТ так же, как в коллекторных двигателях,
Характеристики ВДПТ. Основные характеристики многофазных ВДПТ подобны механической и рабочим характеристикам коллекторных ДПТ. Рассмотрим в качестве примера механические характеристики ВДПТ с т == 3. Фазы обмотки соединены в звезду и подключены к мостовому инвертору на транзисторах (рис. 8.27, а). При прямоугольной форме управляющих однополярных импульсов, подводимых от ДПР к базам транзисторов 7 и 2, 5 и 4, 5 и б с соответствующим сдвигом по фазе, периодически открываются указанные транзисторы инвертора. Постоянное напряжение питающей сети Uc преобразуется в трехфазную систему двухполярных напряжений uф прямоугольной формы на обмотке якоря (рис. 8.27, б). Первая гармоника функции
оставляет |
Ее действующее значение |
 Действующее значение
Действующее значение  равно:
равно:
Таким образом, U/Uф.д = 0,955, следовательно, анализ характеристик ВДПТ можно приближенно проводить по первым гармоникам расчетных параметров машины. Пользуясь теорией явнополюсных СМ, для каждой фазы двигателякпо второму закону Кирхгофа можно записать:
208
209
С учетом этого уравнения на рис. 8.27, в построена векторная диаграмма двигателя. В отличие от СМ угол = const и задается ДПР. Частота со первых гармоник параметров диаграммы зависит от угловой скорости ротора , которая определяет
частоту |
переключения |
число пар полюсов индуктора ВДПТ. |
причем р — |
|
|
Электромагнитная мощность двигателя |
|
|
(8.32) |
(в данном случае число фаз т = 3). Из векторной иаграммы получаем:
(8.33)
Приближенно полагаем что  допустимо для ряда исполнений
допустимо для ряда исполнений
ВДПТ при 2p=>4. С учетом соотношений  из
из
(8.33) находим:
(8.44)
На основании (8.32) и (8.34) электромагнитный момент
(8.45)
Обозначив |
из (8.35) имеем: |
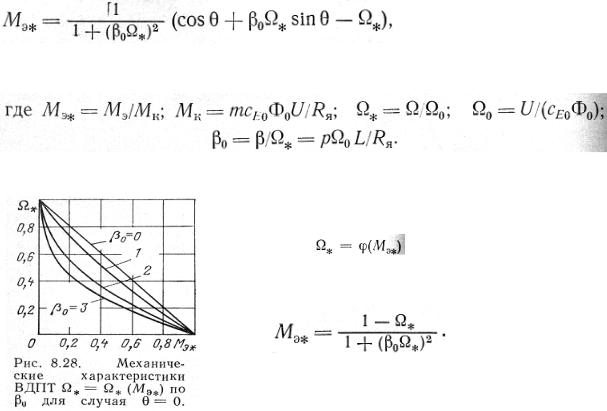
или в безразмерной форме:
209
210
(8.36)
Вуравнении (8.36) механических
характеристик: |
при Uc=const и неизменном |
потоке возбуждения |
о означает угловую скорость |
ротора при идеальном XX. Для =0:
(8.37)
Зависимости * = * (Mэ*) согласно (8.37) построены на рис. 8.28. Влияние L приводит к нелинейности характеристик. Регулирование частоты вращения ВДПТ принципиально можно производить всеми известными
методами, как в коллекторных ДПТ. Рационально совмещение функций регулирующего органа и коммутатора, при этом целесообразен импульсный метод: изменяются отрезки времени питания цепи якоря. Подробные сведения о схемах включения транзисторных и тиристориых коммутаторов и об их применении, а также о различных исполнениях ДПР приводятся в литературе по ВДПТ.
ЛЕКЦИЯ 27. АСИНХРОННЫЙ ДВИГАТЕЛЬ
1. ЭЛЕКТРИЧЕСКИЕ ПОТЕРИ В АСИНХРОННОМ ДВИГАТЕЛЕ
Регулирование скорости рабочего органа связано с изменением количества
подводимой к нему энергии. В установившемся режиме о ней можно судить по мощности,
определяемой (в интерпретации вращательного движения) произведением момента на-
грузки Мс и угловой скорости вращения wc : Р = Мсwc . Характер изменения момента
нагрузки зависит от характеристик рабочей машины. При неизменных параметрах
кинематической передачи между двигателем и рабочей машиной их скорости жестко
связаны, поэтому и регулирование скорости большинства механизмов осуществляется
изменением скорости электродвигателя. Угловая скорость асинхронного двигателя, как
следует из принципа его работы, определяется угловой скоростью магнитного поля оз0 и
скольжением  .
.
Процессы электромеханического преобразования энергии сопровождаются
210