

УстрАСУ / Конспект УАСУ
.pdf251
по полной петле гистерезиса.
Описанные схемы не охватывают всего многообразия применяемых схем управления.
Относительная их простота обусловливает и недостатки, связанные с изменением характеристик при колебании температуры окружающей среды. Однако для электроприводов повторно-кратковременного режима, где отсутствуют жесткие требования к повторяемости характеристик, а основным требованием является простота и надежность, описанным схемам следует отдавать предпочтение.
251
252
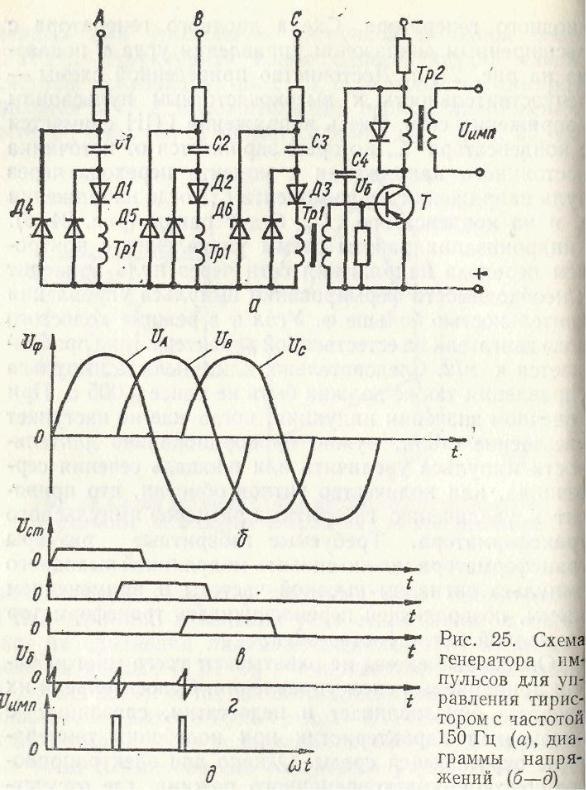
Системы управления тиристорными регуляторами с принудительной коммутацией выполняются по двух-канальной схеме: один канал управляет главным тиристором;
другой—вспомогательным. Рассмотрим работу системы управления двухдвигательным приводом рис.5, б. Принципиальная схема ее изображена, на рис. 25, а, а диаграммы
252
253
напряжений, поясняющие работу схемы, показаны на рис. 25, б, в, г, д.
Управление главным тиристором осуществляется импульсами частотой 150 Гц,
жестко синхронизиро-
ванными с положительными полуволнами каждой фазы. Частота 150 Гц образуется логическим сложением импульсов, снимаемых с каждой фазы. Эти импульсы формируются выпрямлением фазных напряжений UA, Uв, Uс (Рис- 25, б) диодами Д1—ДЗ,
преобразованием их в трапецеидальные импульсы ограниченной амплитуды UZT (рис. 25,
е) с помощью стабилитронов Д4—Д6 и дифференцированием с помощью конденсаторов
С1—СЗ. Импульсы частотой 150 Гц(У6(рис. 25, г) подаются на базу транзистора Т.
Напряжение для управления тиристорами £/имп. (рис. 25, д) снимается со вторичной обмотки трансформатора Тр2.
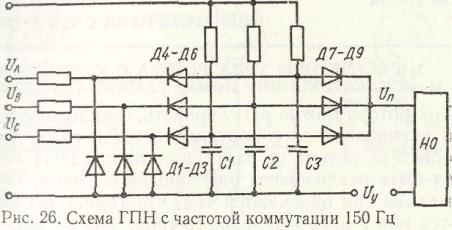
Система управления вспомогательным тиристором содержит все узлы, характерные для систем, в которых реализуется вертикальный принцип управления. От описанной выше она отличается схемой ГПН, структура которого определяется заданной частотой ком мутации. Схема ГПН с частотой коммутации 150 Гц изображена на рис. 26. На конденсаторах С1, С'2 и СЗ формируются три пилообразных напряжения, сдвинутые на угол 120°. Напряжение с выхода ГПН.
Un суммируется с напряжением управления подается на вход нуль-органа НО.
1. РЕГУЛЯТОРЫ ТОКА РОТОРА С ЕСТЕСТВЕННОЙ
И ИСКУССТВЕННОЙ КОММУТАЦИЕЙ ТИРИСТОРОВ
Ток ротора можно регулировать, если плавно изменять эквивалентное сопротивление этой цепи. Регуляторы тока ротора на базе тиристоров (ТРТ) также могут быть реализованы различными схемами. Принципиально они отличаются тем, что тиристоры включаются или в цепь переменного тока, или в цепь выпрямленного тока ротора.
При включении тиристоров в цепь переменного тока происходит их естественная
253
254
коммутация с частотой тока ротора. Регулирование тока ротора и, следовательно,
момента асинхронного двигателя в этом случае осуществляется изменением угла открывания тиристоров. Схемы-включения тиристоров в цепь ро-тора можно разделить на две основные группы: 1) с включением в звезду; 2) с включением в треугольник.
Комбинируя тиристоры с резисторами в цепи ротора и заменяя один из тиристоров диодом при их встречно-параллельном включении, получают разнообразные схемы.
Особый интерес представляют простейшие системы электропривода с естественной коммутацией тиристоров в цепи ротора, содержащие минимальное число силовых полупроводниковых элементов и элементов управления. Они характеризуются небольшими масой и габаритными размерами и обладают повышенной надежностью.
При включении тиристоров в цепь выпрямленного тока ротора осуществляется их искусственная коммутация с определенной заранее выбранной частотой
и переменной скважностью, что позволяет плавно изменять ток ротора в широких
пределах. При этом изменяются момент двигателя и его скорость.
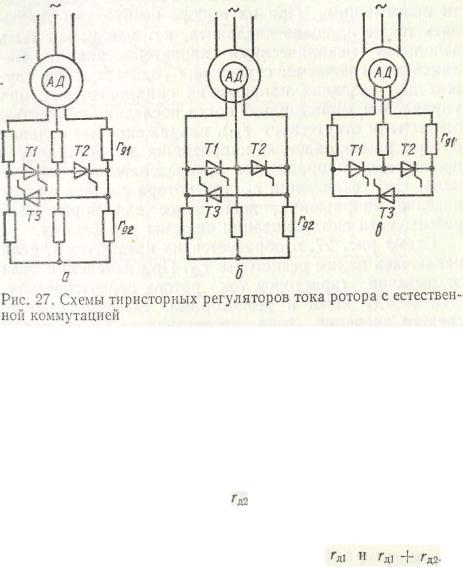
Простейшие схемы электропривода с естественной коммутацией показаны на рис. 27.
В схеме рис. 27, а можно регулировать ток ротора и обеспечивать при, этом удовлетворительные показатели привода в целом. Если изменять угол открывания тиристоров а, то можно перераспределять эквивалентный ток цепи ротора между
тиристорами регулятора и резисторами |
Механические характеристики электропривода |
||
при разных углах открывания располагаются между двумя |
реостатными, |
||
соответствующими |
сопротивлениям |
резисторов |
, Следовательно, |
254

|
|
|
|
|
255 |
площадь |
заполнения |
квадранта |
механических |
характеристик |
определяется |
сопротивлением этих резисторов. |
|
|
|
||
Сопротивления резисторов |
выбираются такими, чтобы потери в двигателе |
||||
были по возможности наименьшими. При их выборе необходимо учитывать также площадь квадранта, которая может быть заполнена механическими характеристиками. Яв-
ляясь невыключаемой ступенью, гд1 одновременно служит для создания напряжения синхронизации при управлений тиристорами: когда последние полностью. открыты (и
отсутствует /-д1), напряжение на кольцах ротора равно падению напряжения на вентилях в проводящем направлении и, следовательно, весьма) мало. При включении гА ток ротора создает на нем падение напряжения, достаточное для нормальной работы узла синхронизации системы управления.
Схема рис. 27, б образуется из предыдущей, если исключить из нее резисторы гд1. При изменении угла открывания тиристоров ток ротора перераспределяется между ними и резисторами. Вследствие этого среднее значение тока, протекающего по обмоткам ротора,
изменяется от максимального значения (когда кольца закорочены тиристорами) до значения, определяемого сопротивлением резисторов гл2- Механические характеристики в этом случае располагаются между естественной и реостатной. Площадь заполненения квадранта механических характеристик зависит от сопротивления резистора гд2, поэтому
следует стремиться к его увеличению.
В схеме рис. 27, в регулятор включен в рассечку нулевой точки резисторов цепи
ротора |
. Механические характеристики располагаются между реостатной, |
|
определяемой |
осью ординат, Площадь заполнения |
квадранта механических |
xapaктeристик зависит, следовательно, от сопротивления |
, поэтому его желательно по |
|
возможности уменьшать. Однако в этой схеме на закрытых тиристорах возникают перенапряжения, вызванные коммутацией первичной цепи (статора) асинхронного двигателя.
255
256
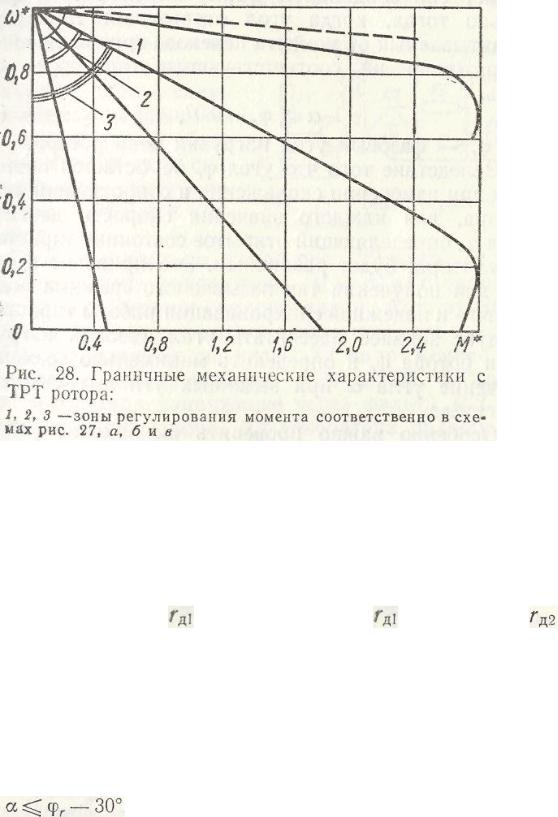
В рассмотренных схемах асинхронного тиристор-ного электропривода обеспечивается регулирование электромагнитного момента двигателя в широких пре-
делах, а при использовании обратных связей по скорости и току— получение механических характеристик необходимой жесткости с ограничением момента в заданных пределах. Возможный диапазон изменения момента двигателя зависит от выбора схемы и сопротивлений резисторов. Граничные механические характеристики рассматриваемых
схем показаны на рис. 28 при |
схемы рис. 27, а, равном |
схемы рис. 27, в, и |
схемы рис. 27, а, равном лд2 |
схемы рис. 27, б. На нем естественная механическая |
|
характеристика показана штриховой линией. |
|
|
При активно-индуктивной нагрузке (такой является цель ротора асинхронного двигателя) ток при-нимает синусоидальную форму во всех трех фазах только тогда, когда угол открывания тиристоров отсчитываемый от момента перехода кривой линейного напряжения на соответствующем тиристоре через нуль,
(3.1)
где ер, — фазовый угол нагрузки цепи ротора.
Вследствие того что угол фг не остается постоянным при изменении скольжения и сопротивления цепи ротора, для каждого значения скорости двигателя угол а,
256

257
определяющий открытое состояние тиристоров' регулятора, будет различным. Это приводит к тому.| что для получения так называемого «режима полной отдачи» и
надежной синхронизации работы тиристоров следует заранее рассчитать угол фазовой нагрузки цепи ротора ц>г и определить минимально возможно значение угла а при заданных угловых скоростях двигателя.
Особенно важно проверять выполнение условия (3.1) для реверсивных электроприводов, поскольку при реверсе поля фаза синхронизации сдвигается на 120°, а
сама синхронизация может быть нарушена. Восстановить надежную синхронизацию можно лишь тогда, когда произведена перекоммутация синхронизирующих цепей, что нежелательно. Однако, с уче том того, что у большинства асинхронных двигателей при пуске с реальными сопротивлениями срг близок к 30°, синхронизацию тиристоров регулятора производят по линейному напряжению тиристора, и пр реверсе она практически не нарушается.
При использовании вертикального принципа управления тиристорами можно применять схему фазосдвигающего устройства, изображенную на рис. 23 и 24.
Применение трансформатора в цепи синхронизации для гальванической развязки силовых цепей с цепями управления затруднено из-за необходи-
В соответствии со схемой рис. 29 ключ 77 в цепи переменного напряжения (/ = 5 кГц)
коммутируется напряжением синхронизации. Амплитуда напряжения цепи ротора изменяется в широких пределах, поэтому подаваемое на ключ 77 напряжение огра-
ничивается стабилитронами Д1 и Д2. С выхода трансформатора напряжение через фильтр
R2C1 подается на вход ключа Т2 генератора пилообразного напряжения.
Вследствие изменения частоты напряжения ротора при регулировании скорости необходимо менять и наклон пилообразного напряжения системы управления. В
противном случае при неизменном напряжении задания и увеличении периода напряжения угол открывания тиристоров уменьшается. Поэтому по мере увеличения скорости при пуске двигателя тиристоры открываются, увеличивая темп разгона, а при
257

258
скольжении s = 0,2...0,1 оказываются полностью открытыми и неуправляемыми. Этим явлением, которое в сущности является внутренней положительной обратной связью по скорости, можно воспользоваться в некоторых случаях для пуска двигателя с ограничением момента без применения специальной (внешней) отрицательной обратной связи по току. Однако таким образом не удается обеспечить надежного ограниче-
рассмотрим четыре схемы импульсного регулирования, которые различаются тем, что
в качестве шунтируемых используются следующие элементы и цепи |
|
|
||||
1) |
резистор R1 (иногда включенный последовательно с вентилем Д1); |
|||||
2) |
последовательная |
цепь |
из |
конденсатора С1 и резистора |
RJ; |
|
3) |
последовательная |
цепь |
из |
конденсатора С1 и резистора R2, шунтируемого |
||
резистором R1 с вен тилем |
Д1; |
|
|
|
|
|
4) |
параллельная цепь из резисторов R2 и R1 с конденсатором |
CJ, |
включенная |
|||
через вентиль Д1, |
|
|
|
|
|
|
В |
первой схеме при |
включении вентиля Д1 последовательно с |
резистором R1 |
|||
258
259
уменьшается необходимая емкость коммутирующего конденсатора С2 примерно в два раза [39]. Вторая и третья схемы принципиально не различаются, однако в третьей появля-
ется возможность изменять соотношение зарядного и разрядного токов конденсатора соответствующим выбором сопротивления резисторов R1 и R2. Это важно, если учесть,
что разрядный ток конденсатора С1 дополнительно, загружает основной тиристор 77. В
четвертой схеме разрядный ток конденсатора С1 не проходит через тиристор 77, а
замыкается через резисторы R1 и R2. Емкость коммутирующего конденсатора минимальна в первой и четвертой схемах.
Применение той или иной схемы в значительной мере определяется необходимой областью регулирования скорости и момента асинхронного двигателя. Поскольку для первой и четвертой схем эквивалентное сопротивление цепи выпрямленного тока ротора плавно изменяется от нуля до R1 и R2 соответственно, а во второй и третьей — от пуля до бесконечности, то область регулирования ограничена зоной от естественной до реостатной характеристики, соответствующей R1 или R2 (для первой и четвертой), или зоной от естественной характеристики до оси ординат. Однако применение второй и третьей схем для заполнения всего первого квадранта механических характеристик может привести ,к практически неприемлемому увеличению габаритных размеров конденсатора С/. Поэтому варианты схем с последовательно включенным конденсатором С1 могут использоваться только при относительно небольших значениях выпрямленного тока ротора, т. е. для двигателей небольшой мощности или для работы только с малыми моментами.
Обеспечить регулирование скорости двигателя в пределах всего первого квадранта механических характеристик можно, если использовать комбинированные схемы, в
которых сочетаются рассмотренные схемы. Переключение схем можно производить контактором. Однако это усложняет схему управления.
Третья схема имеет некоторые преимущества перед второй из-за разных сопротивлений при заряде и разряде конденсатора С1, что позволяет увеличением R2 (по сравнению с R1) уменьшить зону прерывистых токов при работе с малыми моментами.
Четвертую схему целесообразно применять совместно с другими, поскольку подключение имеющегося в схеме конденсатора С1 параллельно резистору R2 позволяет уменьшить напряжение на элементах схемы коммутации [42]. Последние три схемы показаны на рис. 30 штриховой линией. В любой из них шунтируемая часть периодически закорачивается тиристором 77 с определенной частотой и скважностью. Гашение тиристора 77
осуществляется с помощью узла искусственной коммутации, состоящего из вспомогатель-
ного тиристора Т2, коммутирующего конденсатора С2, диода Д2 и дросселя L2.
259
260
Для сохранения напряжения на конденсаторе С2, когда длительно открыт тиристор
77, применяется постоянный источник напряжения Uu подключаемый к схеме через резистор R3, имеющий большое сопротивление и ограничивающий ток в контуре заряда
С2.
Изменяя время включенного состояния тиристора 77, регулируют среднее значение выпрямленного тока ротора. При этом, если пренебречь пульсациями тока, то можно достичь эффекта плавного регулирования активного сопротивления цепи ротора.
Степень пульсаций выпрямленного тока ротора при коммутации тиристора 77
зависит как от индуктивности дросселя L1, так и от частоты коммутации тиристора 77.
Чем больше индуктивность и выше частота коммутации, тем меньше амплитуда пульсаций выпрямленного тока ротора. Однако увеличение частоты коммутации ограничивается следующими факторами: минимальным временем выключения тирис-
торов, частотными свойствами коммутирующего конденсатора, необходимыми пределами регулирования скважности тиристора 77 и др. При уменьшении частоты коммутации тиристора 77 увеличиваются габаритные размеры дросселя L1. Поэтому частота ком-
мутации выбирается обычно 200...500 Гц.
При сравнении рассматриваемых электроприводов с естественной и искусственной коммутацией убеждаемся, что они обеспечивают практически одинаковые диапазоны изменения момента двигателя и площадь заполнения квадранта механических харак-
теристик. Кроме того, жесткие регулировочные механические характеристики можно получить применением отрицательной обратной связи по скорости.
Параметры силовых элементов рассматриваемых электроприводов с регулированием тока в цепи ротора обычно выбираются на основании анализа статических и динамических режимов работы. Сопротивления цепи ротора (см. рис. 27) выбираются такими, чтобы обеспечить минимум потерь в двигателе. Так, рекомендуется принимать
 = 0,1...0,15, а г\2 = 2,0... ...2,6. При выборе приходится считаться также с ограничением,
= 0,1...0,15, а г\2 = 2,0... ...2,6. При выборе приходится считаться также с ограничением,
которое накладывают эти сопротивления на заполнение квадранта механических характе-
ристик. Выбор тиристоров производится с учетом максимального значения среднего тока через них. Для схем рис. 27
(3.2)
Для электропривода с импульсным управлением можно найти максимальное
напряжение на резисторе  — максимальное значение выпрямленного тока. Поэтому сопротивление резистора R1 находят через допустимое
— максимальное значение выпрямленного тока. Поэтому сопротивление резистора R1 находят через допустимое
напряжение  на тиристоре T1:
на тиристоре T1:
260