

УстрАСУ / Конспект УАСУ
.pdf291
в соответствующее положение. Под действием напряжения задания U3 тиристоры открываются. Датчик обратной связи по току ДОСТ контролирует пусковой ток
ротора. При достижении значения тока отсечки на выходе ДОСТ появляется сигнал Uor,
который, складываясь с напряжением на выходном каскаде |
усилителя |
У, |
||
увеличивает |
напряжение управления |
Uy и, следовательно, |
угол открывания |
|
тиристоров. Таким образом, двигатель разгоняется по характеристике, формируемой с
помощью блока токоограничения. Когда двигатель достигает заданного значения
скорости, сигнал с датчика обратной связи по скорости ДОС суммируется с напряжением
задания, поэтому напряжение на выходе усилителя Uv начинает увеличиваться, что
приводит к закрытию тиристоров. Двигатель переходит на жесткую регулировочную
характеристику. Аналогично работает схема
291
292
при переводе контроллера в положения, соответствующие увеличению скорости. При переводе контроллера в положение, соответствующее меньшей скорости, под действием сигнала обратной связи тиристоры закрываются, двигатель работает на характеристике с максимальным сопротивлением, а механизм тормозится под действием статического момента.
Для создания эффективного торможения рукоятку контроллера следует перевести в противоположное положение. Тогда двигатель работает в режиме противовключения, а
значение тормозного момента задается ДОСТ. Если при скорости, равной нулю, не
отключать двигатель, происходит разгон в обратном направлении.
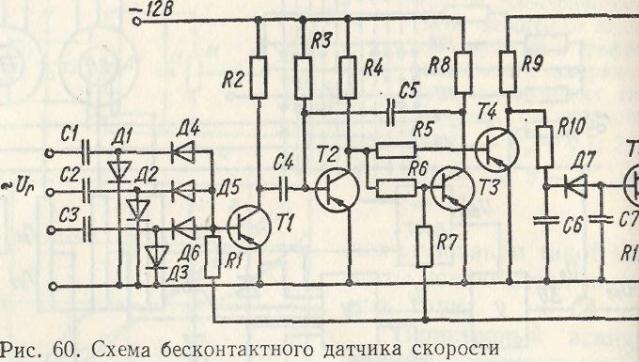
Схема электропривода отличается от известных типом датчика обратной связи по
скорости ДОС схема которого показана на рис. 60. Датчик преобразует частоту тока ротора в напряжение, пропорциональное скорости двигателя. Входные сигналы через
дифференцирующие цепи С1 — СЗ, Д1 — Д6 подаются на вход сумматора |
(77, R2). |
Работа |
датчика |
292
293
частоты основана на широтно-импульсной модуляции напряжения на выходе ждущего мультивибратора T2T3R3R4R6R7R8C5. Параметры мультивибратора подобраны так, что при неподвижном двигателе и частоте следования входных импульсов 150 Гц скважность выходного напряжения равна 0,5. При изменении скорости частота входных импульсов,
снимаемых с блока синхронизации, тоже меняется, что приводит к изменению скважности и напряжения на выходе импульсного усилителя (T4R9M7T5RU). Инерционность датчика определяется параметрами фильтра C6C7R10.
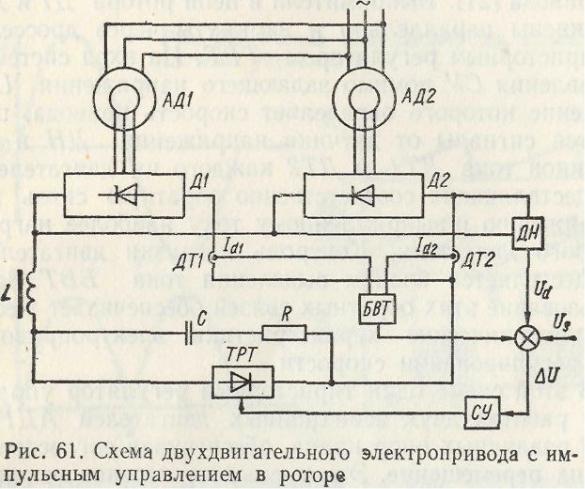
Двухдвигательный асинхронный электропривод механизма передвижения козлового крана. Примером применения импульсного управления в цепи ротора асинхронного двигателя может служить изображенная на рис. 61 схема двухдвигательного элект-
ропривода [21]. Выпрямители в цепи ротора Д1 и Д2 соединены параллельно и замкнуты через дроссель L тиристорпым регулятором ТРТ. На вход системы управления СУ помимо задающего напряжения U%, значение которого определяет скорость привода, подаются сигналы от датчика напряжения ДН и от датчиков тока ДТ1 и ДТ2 каждого из двигателей,
осуществляющих соответственно обратную связь по напряжению и выпрямленному току наиболее нагруженного двигателя. Контроль нагрузки двигателей осуществляется блоком
293

294
выделения тока БВТ. Использование этих обратных связей обеспечивает жесткие
механические характеристики электропривода при регулировании скорости.
В этой схеме один тиристорный регулятор управляет работой двух асинхронных двигателей ЛД1 и АД2 различных опор крана, обеспечивая согласованное их перемещение. Это уменьшает перекос механической конструкции в процессе движения
крана.
S. НАЛАДКА АСИНХРОННЫХ ТИРИСТОРНЫХ ЭЛЕКТРОПРИВОДОВ
При наладке тиристорных регуляторов в производственных условиях необходимо
использовать многопредельные вольтметры постоянного и переменного тока, омметры и осциллографы, причем наиболее удобны двулучевые осциллографы. Наладка любой схемы начинается с измерения напряжений источников питания, которые не должны отличаться от значений, указанных в паспорте на изделие. Проверка работы любых блоков также начинается с измерения напряжений на их входах с последующей проверкой формы напряжения на отдельных элементах схемы. Характерные формы напряжений СУ,
в которой использован принцип вертикального управ ления
(см. рис. 57), показаны на рис. 62. Изменяя значение напряжения Uy (для чего на входные гнезда подают регулируемое напряжение), по осциллографу наблюдают форму напряжений на отдельных каскадах схемы. На входе и выходе моста Д1 кривые напряжений показаны соответственно на рис. 62, а, б. На конденсаторе С2 формируется линейное (пилообразное) напряжение Uc-2 (рис. 62, в), которое, складываясь с
294
295
напряжением на выходе усилителя Uy (рис. 62, г), запирает вентиль Д2 и тем самым снимает Отрицательное смещение с базы транзистора Т2. При отсутствии сигнала на базе
Т2 выходной каскад генерирует напряжение  прямоугольной формы е частотой 4— 5 кГц (рис. 62, а). В общем случае ширина «пачки» импульсов равна 180° — аи изменя-
прямоугольной формы е частотой 4— 5 кГц (рис. 62, а). В общем случае ширина «пачки» импульсов равна 180° — аи изменя-
ется в зависимости от значения а от 180 до 20— 30°.
Полный диапазон изменения угла открывания тиристоров обеспечивается только при правильной синхронизации схемы управления, когда напряжения синхронизации совпадают по фазе с напряжениями на тиристорах. При неправильной синхронизации появляются дополнительные вибрации двигателя. Проверка работы ТРИ при управлении трехфазной нагрузкой без нулевого провода затрудняется вследствие взаимного влияния работы тиристоров разных фаз на формы напряжений и токов, поэтому проверку правильности подключения цепей синхронизации целесообразно выполнять при работе на трехфазную активную нагрузку с нулевым проводом. Ток нагрузки должен превышать ток удержания тиристоров.
Если синхронизация не налажена, то или тиристоры не управляются, или не обеспечивается весь диапазон изменения напряжения на нагрузке. Изменением порядка следования фаз напряжения синхронизации добиваются требуемого режима работы, когда регулирование угла а осуществляется от 0 до 150... ...160°.
По однолучевому осциллографу настройка схемы синхронизации осуществляется последовательным наблюдением формы напряжений на тиристоре и управляющем электроде. Удобно зарисовать границы переднего фронта импульсов управления и сравнить их с фазой напряжения на тиристорах. При этом осциллограф работает в режиме синхронизации от сети.
Для наладки синхронизации ТРГ в роторе регулятор следует отключить от двигателя,
подключить к сети и увеличить сопротивление нагрузки. Если напряжение сети значительно превышает ЭДС ротора, достаточно пропорционально увеличить добавочные сопротивления в цепи синхронизации. Методика наладки остается прежней.
Проверка работы цепи обратной связи по скорости заключается в проверке работоспособности усилителя и полярности включения та хо генератор а или иного датчика обратной связи. Для этого при отключенном двигателе выход датчика размыкается, а на вход усилителя подается регулируемое напряжение. Измеряя напряжения на входе и выходе усилителя, проверяют соответствие коэффициента усиления техническим данным. Для определения полярности сигнала обратной связи после восстановления схемы кратковременно включают двигатель. При правильной полярности напряжений задания U3 и обратной связи U0.c сигнал на выходе усилителя Дс7
295

296
с ростом скорости двигателя уменьшается (до нуля), а ускорение двигателя прекращается.
Неправильное включение датчика приводит к росту напряжения на входе усилителя и раз-
гону двигателя до скорости, превышающей заданную.
Работу цепи обратной связи по току (если она имеется) можно проверить при отключенном двигателе. Эту проверку следует совместить с проверкой работоспособности усилителя. При таком задающем напряжении, которое обеспечивает отсутствие напряжения на выходе усилителя, на вход датчика тока, предварительно отключенного от цепи двигателя, подается регулируемое напряжение. Появление сигнала на выходе усилителя показывает, что напряжение на входе датчика тока равно
напряжению отсечки t/ox, что соответствует току отсечки |
где |
— |
сопротивление резистора, с которого снимается сигнал обратной связи. |
|
|
Наладочные работы требуют особой осторожности. Необходимо помнить, что вход осциллографа связан с корпусом прибора. При производстве работ следует изолировать
корпус осциллографа от заземленных конструкций и не следует прикасаться к нему во
время измерений. В двухлучевых осциллографах входы обо-их каналов имеют гальваническую связь через корпус прибора, вследствие чего измерять два напряжения одновременно можно лишь в схемах, имеющих общую точку.
Возможны различные неисправности при работе ТРН (ТРТ). При полностью открытых неуправляемых тиристорах двигатель работает на реостатных характеристиках даже на первых положениях контроллера. В этом случае нельзя получить жесткие
регулировочные характеристики и, следовательно, установочные скорости.
При однофазном включении, когда тиристоры несимметричного регулятора полностью закрыты и не управляются, момент неподвижного двигателя равен нулю. Для механизмов подъема такая неисправность создает опасность чрезмерного увеличения скорости спуска, и в схеме обязательно необходимо предусмотреть защиту (например, по
схеме рис. 58).
При неисправности одного из тиристоров в статоре или роторе появляются постоянная составляющая тока, ударные моменты, вибрации двигателя. При управлении и подмагничивании постоянным током двигатель не разгоняется, а работает на малой ско-
рости. От такой неисправности также желательно предусматривать защиту.
СПИСОК ЛИТЕРАТУРЫ
1. |
Асинхронный электропривод с тиристорными коммутаторами / Л. П. Петров, В. |
||||
А. Ладензоп, М. |
П. |
Обуховский, Р. Г. Подзолов.— М. : Энергия, 1970,— 128 с. |
|||
2. |
Боржим |
А. С, |
Герасимяк |
Р. |
П., Томмак X. Д. Расчет механических |
296
297
характеристик асинхронного несимметричного электропривода с тиристорами.— Электромашиностроение и электрооборудование: Респ. межвед. науч.-техн. сб.,
1977, вып. 24, с. 47—53.
3.Браславский И. Я-, Кирпичников Ю. А. Совместное управление тиристорными асинхронными электроприводами.— Электротехника, 1976, № 2, с. 19—22.
4.Вешеневский С. Н. Характеристики двигателей в электроприводе.— М. : Энергия, 1977.— 432 с.
5.Войтех А. А., Киричек Г. М., Лир Э. В. Асинхронные электродвигатели с регулированием скорости.— К. : Техшка, 1973,— 172 с.
6. |
Герасимяк Р. |
П. |
Тиристорный электропривод для кранов.— М. : Энергия, |
|||
1978.— 112 с. |
|
|
|
|
|
|
7. |
Герасимяк |
Р. П., |
Ковригин В. А. Использование |
метода частотных |
||
характеристик для анализа |
устойчивости |
асинхронного |
электропривода.— |
|||
Электротехн. пром-сть. |
Сер. |
Электропривод, 1975, вып. 8, с. 18—24. |
||||
8.Герасимяк Р. П., Лещев В. А. Автоматизированный электропривод механизмов поворота портальных кранов.— Механизация и автоматизация пр-ва, 1977, № 1, с. 22—23.
9.Герасимяк Р. П., Лещев В. А. Асинхронный тиристоркый электропривод с управлением в цепи ротора.— Электромашиностроение и электрооборудование: Респ. межвед. науч.-техн. сб., 1977, вып. 25, с. 64—67.
10.Герасимяк Р. П., Лещев В. А. Электромагнитный момент асинхронного
электропривода |
с |
тиристорным управлением |
в цепи ротора.— Изв. вузов. |
Сер. |
||||||
Электромеханика, 1981, № 1, с. 22—28. |
|
|
|
|
|
|
||||
11. |
Герасимяк Р. П., |
Мазур А. |
С. Регулируемый |
электропривод кранового |
||||||
механизма подъема.— Механизация и автоматизация пр-ва, 1980, № 1, с. 13—14. |
|
|||||||||
12. |
Герасимяк Р. П., Параил В. А. |
Электроприводы |
крановых механизмов.— М. : |
|||||||
Энергия, |
1970.— 136 с. |
|
|
|
|
|
|
|
||
13. |
Герасимяк Р. П., |
Путилин Н. С. |
Выбор |
силовых схем регулируемого |
||||||
тиристорпого |
асинхронного электропривода |
с фазовым управлением.— Изв. |
вузов. |
|||||||
Сер. Энергетика, |
1975, № 8, с. 37—41. |
|
|
|
|
|
|
|||
14. |
Герасимяк Р. П., Томиак X. Д. Сравнительный |
анализ систем несимметричного |
||||||||
тиристорного асинхронного электропривода с конденсаторами в статорной цепи.— Изв. вузов. Сер. Энергетика, 1974, № 8, с. 46—50.
15. Герасимяк Р. П., Шойхет Г. И. Статический датчик скорости асинхронного электропривода с параметрическим управлением.— Изв. вузов. Сер. Энергетика, 1980, № 2, с. 80—82.
297
298
16.Герасимяк Р. П., Ковригин В. А., Путилин Н. С. Формирование динамических характеристик асинхронного электропривода с тиристорным регулятором напряжения.— Электротехника, 1977, №8, с. 16—18.
17.Герасимяк Р. П., Петров Н. К-, Путилин Н. С. Переменные составляющие
момента в асинхронном электроприводе с тиристорным регулятором напряжения.—
Электричество, 1976, ЯЬ 11, с. 75—78,
18.Герасимяк Р. П., Орловский А. А., Соболев Ю. С. Двух-двигательный асинхронный электропривод с общим тиристорным коммутатором в цепях статоров.— Изв. вузов. Сер. Электромеханика, 1978, № 6, с. 634—639.
19.Данилов П. Е. Асинхронный электропривод с регулированием выпрямленного тока ротора импульсным методом.— М.: Моск. энерг. ин-т, 1977.— 67 с.
20.Датчик скольжения асинхронного двигателя / М. М. Со-колов, Л. Б. Масандилов, Ю. В. Рожановский, О. С. Хачапурид-зе.—Тр. МЭИ. Сер. Автоматизир. электропривод, 1977, вып. 325, с. 87-91.
21. Двухдвигательный тиристорный асинхронный электропривод механизма
передвижения козлового |
крана / П. Е. Данилов, И. П. Филатенков, В. А. Барышников и |
|||||
др.— Тр. МЭИ. Сер. Электромех. системы |
автоматизир. |
электропривода, 1978, вып. |
||||
1, с. 39—49. |
|
|
|
|
|
|
22. |
Квартальное |
Б. |
В. Динамика |
автоматизированных электроприводов |
с |
|
упругими |
механическими |
связями.— М.; Л. : Энергия, |
1965,— 88 с. |
|
||
23.Ключев В. И. Ограничение динамических нагрузок электропривода.— М. : Энергия, 1971.— 320 с.
24.Ключев В. И-, Терехов В. М. Электропривод и автоматизация общепромышленных механизмов,—М. : Энергия, 1980 — 360 с.
25.Ковач К- П., Рац И. Переходные процессы в машинах переменного тока.— М. : Госэнергоиздат, 1963.— 738 с.
26. |
Ковригин В. А. Инженерный метод расчета |
коррекции асинхронного |
электропривода с тиристорным регулятором на пряжения,— Электромашиностроение
иэлектрооборудование: Респ. межвед. науч.-техн. сб., 1979, вып. 28, с. 26—29.
27. |
Ковригин В. А. Учет ЭДС вращения |
при расчете асинхронного электропривода |
с тиристорными регуляторами напряжения.— Электротехника, 1980, № 5, с. 24—28. |
||
28. |
Костенко М. П., Пиотровский |
Л. М. Электрические машины.— М.; Л.: |
Госэнергоиздат, 1958.— Ч. 2. 651 с. |
|
|
29.К построению асинхронного электропривода при импульсном управлении в
роторной цепи с обратной связью по э. д. с. ротора/В. А. Барышников, С, Л. Булочко, С.
298
|
|
|
|
|
299 |
П. Голев |
и др.— Тр. МЭИ. Сер. |
Автоматизир, |
электропривод, 1975, вып. |
9, с. |
|
15—20. |
|
|
|
|
|
30. |
Крановый электропривод переменного тока с тиристорным фазовым |
||||
регулятором / А. П. Богословский, |
3. С. Волкова, А. Г. Яуре и др.— Электротехн. |
пром- |
|||
сть. Сер. Электропривод, 1974, вып. 5, с. 13—17. |
|
|
|||
31. |
Лайон В. |
Анализ |
переходных |
процессов в электрических машинах |
|
переменного тока.— М. : Госэнергоиздат, 1958.— 400 с. |
|
||||
32.Лещев В. А. Метод расчета механических характеристик асинхронного электропривода с тиристорами в цепи ротора,— Электромашиностроение и электрооборудование: Респ. межвед. науч.-техн. сб., 1978, вып. 27, с. 60—67.
33.Мазур А. С. Особенности выбора мощности асинхронного двигателя при
несимметрии |
питающего |
напряжения,— |
Электромашиностроение |
и |
|||||||||
электрооборудование: |
Респ. |
межвед. |
науч.-техн. сб., 1980, вып. 30, с. 84—87. |
||||||||||
34. |
Масандилов Л. Б., Москаленко В. В. Регулирование |
|
частоты |
|
вращения |
||||||||
асинхронных |
двигателей.— М. : |
Энергия, 1978,-96 с. |
|
|
|
|
|||||||
35. |
Моделирование |
асинхронных |
|
электроприводов |
с |
тирн-сторным |
|||||||
управлением / |
Л. |
П. |
Петров, |
В. |
А. |
Ладензон, Р. Г. Подзолов, В. А. Яковлев.— |
|||||||
М. : Энергия, |
1977,— 200 с. |
|
|
|
|
|
|
|
|
|
|||
36. |
Новиков М. Н., Школьников А. И. О формировании пус-ко-тормозных режимов |
||||||||||||
работы асинхронного двигателя с фазовым регулированием |
частоты |
|
вращения.— |
||||||||||
Электротехника, |
1975, № 7, с. 1—4. |
|
|
|
|
|
|
|
|||||
37. |
Петров Н. К., Путилин Н. С. Аналитический метод расчета гармонических |
||||||||||||
составляющих момента.— Электромашиностроение и электрооборудование: Респ, межвед. науч.-техн. сб., 1976, вып. 23, с. 33— 36.
38.Полупроводниковые выпрямители / Под. ред. Ф. И. Кс валева, Г. П. Мостковой.— М. : Энергия, 1978.— 448 с.
39.Путилин Н. С. Потери в асинхронном двигателе, питаемом от тиристорного
регулятора напряжения.— Электромашииостроние |
и |
электрооборудование: Респ. |
межвед. науч.-техн, сб., 1979, вып. 28, с. 57—64.
40.Соболев Ю. С. Методика расчета механических характеристик тиристорного электропривода с импульсным управлением в цепи статора.— Электромашиностроение и электрооборудование: Респ. межвед. науч.-техн. сб., 1977, вып. 25, с. 67—7-3.
41.Соколов М. М. Автоматизированный электропривод общепромышленных
механизмов.— М. : Энергия, 1976.— 488 с.
42. Соколов М. М-, Данилов П. Е. Асинхронный электропривод с импульсным
299
300
управлением в цепи выпрямленного тока ротора.— М. : Энергия, 1972.— 72 с.
43. Соколов М. М., Масандилов Л. Б., РожанковскиЙ Ю. В. Пульсации момента асинхронного двигателя в установившемся режиме работы.— Электротехника, 1974, № 10, с. 31—33.
44.Справочник по преобразовательной технике/ Под ред. И. М. Чиженко.— К. : Техника, 1976.— 447 с.
45.Такеути Т. Теория н применение вентильных цепей для регулирования двигателей.— Л. : Энергия, 1973.—- 312 с.
46.Танатар А. И. Методы регулирования скорости асинхронных двигателей.— К. : Техшка, 1968,-— 157 с.
47.Чиликин М. Г., Козлитин Л. С. Исследование асинхронного электропривода с тиристорным регулятором напряжения.— Тр. МЭИ. Сер. Электромеханика, 1966, вып. 66, ч. 1, с. 125—141.
48.Чиликин М. Г., Ключев В. И., Сандлер А. С. Теория автоматизированного
электропривода.— М. : Энергия, 1979.— 616 с.
49. Шубенко В. А., Браславский И. Я- ТиристорныЙ асинхронный электропривод
сфазовым управлением,— М. : Энергия, 1972.— 200 с.
60.Электромагнитные переходные процессы в асинхронном алектроприводе / М. М. Соколов, Л. П.Петров, Л. Б. Масан-дилов, В, А. Ладензон.— М : Энергия, 1967,— 200 с.
51. |
Юньков !Л. Г. Электропривод— уровень и |
перспективы.— Электротехника, |
|||||
1980, Na 1, с. 33—36. |
|
|
|
|
|
||
52. |
Becker |
U, |
Arnplitudensteuerung |
in |
Drehstromsystem durch |
p-pulsige |
|
Steller.— Wiss. |
Z, |
Techn, Hochshul |
Illme-nau, 1972, N 2, s. 109—122. |
|
|||
53. |
Covacs L. Drehstromstellergespeiste Asynchronmotorantrie-be.— Elektrie, 1972, Bd |
||||||
26, N4,8. 106—107. |
|
|
|
|
|
||
54. |
Figini G. Regolazlone di velocita medlante |
dispositivi ro-torici nei |
motori |
||||
asinchroni trifasi.— EHettrificaziane, |
1973, N 1, |
p. 15—20. |
|
||||
55. |
HajkovaM., Navratii S., Zoubek Z. Casova odesva momentu asynchronniho motoru na |
||||||
skok napeti,— Elektrotechnicky obzor, 1972, N 12, s. 641—649, |
|
||||||
56 Mafsui N.. Suzuki M.— Нагоя кочё дайгаку гакухо.— Bull. Nagoya Inst. Technol, 1978, N 30, p. 269-276.
57. Ramamoorty M., Arynachalam M. Dynamic performance of a closed— loop induction motor speed control system with phase — controlled SCR'S in the rotor.— IEEE. Trans. Ind. Appl, 1973, 15, N5, p. 489-493.
58 Vandeplangue P., Boulier M. Sur le fonctionnement a vitesse' quasiconstante d'ui)
300