

УстрАСУ / Конспект УАСУ
.pdf331
статора, |
зубцовую зону называют классической; при |
— гребенчатой; |
при |
где — произвольное число — произвольной зубцовой зоной. Зубцы ротора- |
|
индуктора в индукторных машинах играют роль полюсов. При этом если в СМ со знакопеременным магнитным потоком полный период изменения ЭДС соответствует
повороту ротора на два полюсных деления |
, то в индукторных машинах период |
|
изменения ЭДС соответствует повороту ротора на одно зубцовое деление |
. При |
|
этом соответствует двойному полюсному |
делению Вследствие этого |
взаимная |
индуктивность между обмоткой возбуждения и произвольной  фазой
фазой  -фазной обмотки при вращении ротора периодически изменяется с двойной угловой частотой по отношению к частоте вращения. Генерируемая частота индукторного СГ в 2 раза больше, чем в СГ со знакопеременным магнитным потоком при одинаковом числе зубцов ротора, если каждый полюс классической СМ поставить в соответствие зубцу ротора индукторной СМ. В связи с этим жесткая связь между частотой переменного тока и частотой вращения индукторных СМ устанавливается соотношением
-фазной обмотки при вращении ротора периодически изменяется с двойной угловой частотой по отношению к частоте вращения. Генерируемая частота индукторного СГ в 2 раза больше, чем в СГ со знакопеременным магнитным потоком при одинаковом числе зубцов ротора, если каждый полюс классической СМ поставить в соответствие зубцу ротора индукторной СМ. В связи с этим жесткая связь между частотой переменного тока и частотой вращения индукторных СМ устанавливается соотношением  , где
, где Индукторные СГ могут быть выполнены на высокие частоты, порядка нескольких тысяч герц.
Индукторные СГ могут быть выполнены на высокие частоты, порядка нескольких тысяч герц.
Индукторные СГ, не рациональные по массе и энергетическим показателям при частоте имеют преимущество перед обычными СМ при высоких частотах с точки зрения простоты конструкции, меньших потерь в стали и более высоких окружных скоростей, что приводит к снижению размеров и массы.
имеют преимущество перед обычными СМ при высоких частотах с точки зрения простоты конструкции, меньших потерь в стали и более высоких окружных скоростей, что приводит к снижению размеров и массы.
Маломощные высокочастотные (порядка нескольких тысяч герц) индукторные СГ находят применение на ЛА в качестве датчиков расхода жидкостей (например, топлива), вырабатывая высокочастотный сигнал, частота которого жестко связана с частотой вращения ротора, находящегося в жидкости. Индукторные датчики вместе с регистрирующей аппаратурой представляют собой прибор для измерения расхода — расходомер.
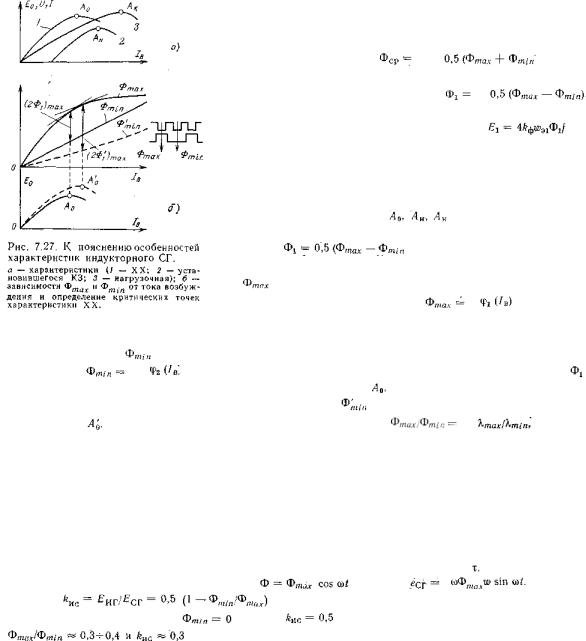
Особенности характеристик индукторных генераторов связаны с наличием ^постоянной составляющей магнитного потока и с тем обстоятельством, что магнитный поток изменяется лишь по величине, не являясь знакопеременным. Магнитный поток в воздушном зазоре и зубцах статора периодически изменяется от , когда оси зубцов
, когда оси зубцов
331
332
ротора и статора совпадают, до когда ось зубца статора совпадает с осью межзубцового промежутка ротора. Таким образом, поток в воздушном зазоре машины состоит из по-
когда ось зубца статора совпадает с осью межзубцового промежутка ротора. Таким образом, поток в воздушном зазоре машины состоит из по-
стоянной |
составляющей |
= |
и |
||
переменной |
|
|
|
|
|
составляющей |
с |
амплитудой = |
, |
||
которой |
про- |
|
|
|
|
порционально действующее значение ЭДС |
На |
||||
рис. 7.27, а
приведены характеристики _ XX /, нагрузочная 2 и КЗ 3, принципиально отличающиеся от аналогичных характеристик СГ. Характеристики индукторных генераторов
имеют критические точки . Это обстоятельство |
|
объясняется следующим образом. |
|
Переменная |
составляющая потока i |
наводит ЭДС в обмотке якоря. Максимальный магнитный
поток |
замыкается через минимальный |
воздушный |
|
зазоо (рис. 7.27, б) и зависимость |
= |
аналогична |
|
кривой намагничивания обычных электрических машин, т. е. имеет линейный участок и яв-новыраженную зону насыщения. Минимальный
магнитный |
поток замыкается через |
минимальный воздушный зазор, в |
силу чего |
|||
зависимость |
= |
практически |
линейна. |
Поэтому |
переменный |
поток с |
увеличением тока возбуждения _ возрастает до точки |
а затем начинает понижаться. |
|||||
Если минимальный поток уменьшить до значения |
, то критическая точка сместится |
|||||
вправо до |
Следовательно, чем больше отношение |
= |
тем при |
|||
большем значении МДС возбуждения достигается критическая |
точка. |
|
||||
Таким образом, в индукторных машинах магнитная цепь должна быть малонасыщенной, а отношение магнитных проводимостей должно быть возможно большим.
должно быть возможно большим.
Индукторные СГ характеризуются коэффициентом использования потока, равным отношению их ЭДС и ЭДС СГ со знакопеременным потоком при одинаковом максимальном магнитном потоке (т. е. при одинаковой нагрузке магнито-провода).
Очевидно, что ЭДС, |
которая навелась бы в катушке якоря шириной , при |
изменении |
|||
потока |
по |
закону |
равна |
= |
Таким |
образом, |
|
|
|
|
|
В идеальном случае, |
когда , имеем . |
В реальных машинах |
|
||
|
|
. Отсюда видно, что индукторные СГ значительно уступают |
|||
СГ по использованию магнитного потока. Следовательно, при одинаковой мощности индукторные СГ должны иметь более развитый магнито-провод и большую массу, чем машины со знакопеременным потоком. Относительная масса индукторных СГ примерно на 40—60 % выше, чем у БСГ с вращающимся выпрямителем при
Внешние характеристики индукторных СГ  при прочих равных условиях имеют меньшую жесткость, чем у классических СГ, т. е. напряжение с
при прочих равных условиях имеют меньшую жесткость, чем у классических СГ, т. е. напряжение с
изменением тока якоря в индукторных СГ изменяется в большей степени. Это связано с повышенным значением синхронных индуктивных сопротивлений  индукторных машин по сравнению с классическими СМ. Для первых гармоник ЭДС и тока для индукторного СГ справедлива векторная диаграмма СГ при значениях параметров
индукторных машин по сравнению с классическими СМ. Для первых гармоник ЭДС и тока для индукторного СГ справедлива векторная диаграмма СГ при значениях параметров индукторной машины.
индукторной машины.
Увеличение  индукторного СГ связано со следующим обстоятельством. В индукторных СГ используется переменная составляющая
индукторного СГ связано со следующим обстоятельством. В индукторных СГ используется переменная составляющая магнитного потока. Поэтому при одном и том же значении максимального потока в классическом и индукторном СГ и при одном и том же значении ЭДС якорная обмотка индукторного СГ должна иметь
магнитного потока. Поэтому при одном и том же значении максимального потока в классическом и индукторном СГ и при одном и том же значении ЭДС якорная обмотка индукторного СГ должна иметь
332

333
большее число витков, чем якорная обмотка классического СГ.
Малая жесткость внешних характеристик и соответственно резко возрастающая регулировочная характеристика при i индуктивного характера затрудняют стабилизацию напряжения посредством автоматических регуляторов, так как последние согласно регулировочной характеристике должны работать в широком диапазоне изменения тока возбуждения. Для повышения жесткости внешних характеристик индукторных СГ иногда применяют продольную емкостную компенсацию, включая между обмоткой якоря и внешней нагрузкой компенсирующие емкости так, чтобы
индуктивного характера затрудняют стабилизацию напряжения посредством автоматических регуляторов, так как последние согласно регулировочной характеристике должны работать в широком диапазоне изменения тока возбуждения. Для повышения жесткости внешних характеристик индукторных СГ иногда применяют продольную емкостную компенсацию, включая между обмоткой якоря и внешней нагрузкой компенсирующие емкости так, чтобы
7.7. СИНХРОННЫЕ ДВИГАТЕЛИ (СД)
С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ
На летательных аппаратах в электроприводах постоянной частоты вращения механизмов нашли применение СД с электромагнитным возбуждением. Основным их преимуществом по сравнению с другими типами СД является более высокое использование объема машин, связанное с высокими энергетическими показателями: КПД и cos ср. Синхронные двигатели не имеют естественного пускового момента, что требует применения специальных пусковых устройств. Основными способами пуска СД являются: частотный и асинхронный пуск. Частотный пуск осуществляется от специального источника переменного тока с регулируемыми напряжением и частотой. Включение СД производят при некоторой минимальной частоте источника питания  , а после вхождения двигателя
, а после вхождения двигателя
в синхронизм при частоте вращения поля i плавно
плавно
повышают частоту тока источника питания, одновременно регулируя напряжение источника и возбуждение СД. При этом скорость нарастания частоты источника во
времени |
в процессе частотного пуска |
до значения |
не |
|
должна |
превышать |
определенного |
максимального |
|
значения |
|
|
|
|
Главным недостатком частотного пуска является его сложность, так как необходим специальный источник питания с регулируемым напряжением и частотой. Для СД ЛА более рациональным является асинхронный пуск, при котором двигатель включают в сеть при номинальных значениях напряжения и частоты. Синхронный двигатель разгоняют до частоты вращения, близкой к синхронной (подсинхронной) , используя при этом демпферную обмотку, выполняющую в процессе разбега роль коротко-замкнутой типа «беличья клетка» обмотки ротора АД. Принципиально можно производить асинхронный пуск возбужденного и невозбужденного СД.
, используя при этом демпферную обмотку, выполняющую в процессе разбега роль коротко-замкнутой типа «беличья клетка» обмотки ротора АД. Принципиально можно производить асинхронный пуск возбужденного и невозбужденного СД.
В последнем случае обмотка возбуждения СД при пуске замыкается накоротко или на некоторое активное сопротивление, а напряжение возбуждения включается при подсинхронной частоте вращения. Условия асинхронного пуска возбужденного СД менее
благоприятны, чем развозбужденного. При разбеге ротора возбужденного СД поток его полюсов наводит в обмотке статора ЭДС. Эта ЭДС вызывает в обмотке статора ток, который замыкается через сеть и ограничивается только сопротивлениями СД и сети. В результате в процессе асинхронного пуска даже при  возникает тормозной момент
возникает тормозной момент  эквивалентный по своему действию моменту
эквивалентный по своему действию моменту  . Свойства СД в установившемся синхронном режиме при •
. Свойства СД в установившемся синхронном режиме при •
 и токе возбуждения
и токе возбуждения характеризуют рабочие характеристики, представляющие собой за-
характеризуют рабочие характеристики, представляющие собой за-
333

|
|
|
|
|
|
|
|
|
|
334 |
висимости |
|
|
в функции полезной мощности на валу |
|
|
|||||
Частота вращения |
при |
постоянной частоте питающей |
сети |
|
постоянна |
|||||
вплоть |
до |
выхода |
СД из синхронизма, что определяется |
перегрузочной |
||||||
способностью |
в |
соответствии |
с |
угловой |
характеристикой. |
Момент на |
||||
валу |
|
|
|
внешний |
момент |
сопротивления |
со |
стороны |
||
механизма. |
|
При |
|
|
|
|
где |
|
|
|
Следовательно, |
|
пропорциональны _ |
Кривая |
КПД |
|
имеет |
||||
обычный для электрических машин экстремальный |
вид. |
Рабочие |
характеристики |
|||||||
возбужденного |
|
синхронного двигателя приведены на рис. 7.28, а. |
||||||||
Зависимости |
|
определяются |
|
уровнем возбуждения двигателя |
в режиме |
|||||
XX. Если |
установить ток возбуждения, соответствующий = |
|
= 1 в режиме XX двигателя |
(кривая 1 на рис. 7.28, б), то при нагрузке для |
|
получения |
необходимо |
увеличить ток возбуждения. При неизменном токе |
возбуждения в режиме нагрузки будет иметь место режим недовозбуждения, при котором возникает реактивный ток индуктивного характера и
 . Если же установить ток возбуждения так, что cos <р = 1 в режиме номинальной нагрузки (кривая 2
. Если же установить ток возбуждения так, что cos <р = 1 в режиме номинальной нагрузки (кривая 2
на рис. 7.28, б), то при недогрузке |
|
двигатель потребляет из сети реактивный |
||||||
ток емкостного |
характера: |
|
|
|
а при |
перегрузке — ток |
||
индуктивного |
характера: |
|
Для |
возможно |
меньшего изменения |
|||
при изменении нагрузки (полезной |
мощности |
) |
рационально установить ток |
|||||
возбуждения |
на некотором среднем уровне (кривая 3 на рис. 7.28, б). Зависимость |
|||||||
|
особенно важна для источника питания ограниченной мощности на ЛА. |
|||||||
7.8. |
СИНХРОННЫЕ |
ПАРАМЕТРИЧЕСКИЕ |
(РЕАКТИВНЫЕ) |
|||||
ДВИГАТЕЛИ (СРД) |
|
|
|
|
|
|||
Явнополюсная СМ при отсутствии возбуждения в |
|
|
||||||
соответствии с угловой характеристикой способна |
|
|
||||||
развивать добавочный электромагнитный момент и |
|
|
||||||
добавочную электромагнитную мощность, физический |
|
|
||||||
смысл которых рассмотрен выше. Невозбужденная |
|
|
||||||
явнополюсная СМ применяется в режиме синхронного |
|
|
||||||
параметрического |
реактивного |
двигателя, |
|
|
||||
электромагнитный момент в котором возникает лишь |
|
|
||||||
при неравенстве параметров |
|
|
|
|
|
|||
Простота |
|
|
конструкции |
и |
высокая |
|
|
|
надежность, |
|
|
связанные |
с |
отсутствием |
|
|
|
скользящих |
контактов — главные |
|
|
|
|
|
||
преимущества СРД по сравнению с СД с электромагнитным возбуждением классического исполнения. Основным недостатком СРД является потребление из сети значительной реактивной мощности, что снижает энергетические показатели (cos cp и КПД). Электродвигатели этого типа применяются в схемах синхронной связи, звукозаписи, аппаратуре документальной связи, радиолокации и других устройствах.
Как следует из формулы добавочного электромагнитного момента СМ, при прочих равных условиях максимум мощности СРД будет при Поэтому конструкцию ротора стремятся выполнить таким образом, чтобы получить
Поэтому конструкцию ротора стремятся выполнить таким образом, чтобы получить
максимальную степень |
явнополюсности |
Явнополюсный |
ротор |
обычной |
|
конструкции (рис. 7.29, а) для этой цели выполняют с |
~ |
Более высокую |
|||
степень явнополюсности |
имеет слоистый ротор |
(рис. |
7.29, б). |
Слои |
пластин |
334

335
электротехнической стали с высокой магнитной проницаемостью, ориентированные по продольной оси ротора, разделены слоями алюминия, образующими короткозамкнутую клетку, которая выполняет роль демпферной и пусковой обмотки. Такая конструкция существенно увеличивает магнитное сопротивление для магнитного потока по поперечной оси, что приводит к снижению  и повышению степени явнополюсности. Для пуска СРД, так же как и для возбужденных СД, может применяться частотный и асинхронный способы пуска.
и повышению степени явнополюсности. Для пуска СРД, так же как и для возбужденных СД, может применяться частотный и асинхронный способы пуска.
Рабочие статические характеристики в функции полезной мощности
в функции полезной мощности определяют свойства СРД в установившемся синхронном режиме и аналогичны рабочим характеристикам СД с возбуждением. Однако значения
определяют свойства СРД в установившемся синхронном режиме и аналогичны рабочим характеристикам СД с возбуждением. Однако значения
 для СРД значительно ниже, чем СД с возбуждением. Кривая
для СРД значительно ниже, чем СД с возбуждением. Кривая =
= монотонно возрастающая, так как СРД является предельным случаем недовозбужденного
монотонно возрастающая, так как СРД является предельным случаем недовозбужденного
СД , и при |
XX потребляемый ток является |
практически |
реактивным |
намагничивающим током. Активная составляющая тока лишь компенсирует потери XX. |
|||
При номинальной |
нагрузке СРД тем больше, чем |
больше |
степень |
явнополюсности |
|
|
|
7.9.СИНХРОННЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
Вразличных системах авиационной автоматики для преобразования управляющих импульсов в заданный угол поворота применяются СД, в которых магнитное поле статора вращается не равномерно, а поворачивается дискретно при подаче управляющего сигнала. При этом вращающий момент резко изменяется во времени и имеет форму
импульсов, а ротор совершает дискретные перемещения. Такие СД называют импульсными или шаговыми.
Рис. 7.30. Пояснение принципа действия шагового двигателя. а — схема; б—в — временная диаграмма токов в обмотках при коммутации.
Шаговые двигатели выполняются как с активным (имеющим обмотку возбуждения постоянного тока или постоянные магниты), так и с пассивным («реактивным») ротором. Ротор шаговых двигателей всегда имеет явнополюсное исполнение.
Статор шагового двигателя имеет две (иногда несколько), смещенные в пространстве, сосредоточенные или распределенные обмотки, которые последовательно питаются постоянным током от сети постоянного тока через коммутатор. При этом полюсы ротора устанавливаются против возбужденных полюсов статора, по обмоткам которых протекает ток. При подаче тока в другие обмотки статора ротор поворачивается на один шаг в положение, при котором его полюсы устанавливаются против следующих возбужденных полюсов статора. При каждом переключении постоянного тока в обмотках статора (обмотках управления) ротор шагового двигателя поворачивается на один шаг.
Одна из конструктивных схем шагового двигателя с возбужденным ротором приведена на рис. 7.30. Зубцовый шаг статора равен половине полюсного деления. На статоре уложены две независимые обмотки 1 и 2, состоящие из сосредоточенных катушек, охватывающих один зубец. Таким образом, зубцы, охватываемые катушками одной и
335
336
другой обмоток, чередуются. Если полюсы ротора выполнены из постоянных магнитов, то шаговый двигатель становится бесконтактным.
В статорные обмотки поочередно подаются импульсы постоянного тока (рис. 7.30, б, в). Полярность тока в обмотке при переключении изменяется. При каждом переключении тока в обмотках статора ротор поворачивается на один шаг. Для реверса двигателя необходимо изменить полярность включения одной из обмоток статора.
Шаговые двигатели с возбужденным ротором имеют достаточно большой шаг и большую пульсацию момента, которые зависят от числа полюсов. Увеличение числа полюсов в шаговых двигателях с активным ротором с целью снижения шага и пульсации момента ограничивается конструктивно-технологическими возможностями явнополюсного ротора с размещенной на нем обмоткой возбуждения и энергетическими соображениями. Из-за достаточно крупного шага (15—90)° и большой .пульсации момента шаговые двигатели с возбужденным ротором применяются реже, чем шаговые реактивные двигатели. Шаговые реактивные двигатели позволяют получить до 200 шагов в секунду, что связано с возможностью получения большого числа зубцов невозбужденного ротора. Статор в этом случае может быть как двух-, так и многофазным.
7.10. СИНХРОННЫЕ ДВИГАТЕЛИ С КАТЯЩИМСЯ РОТОРОМ (ДКР)
Синхронные ДКР имеют частоту вращения в соответствии с соотношением  , где
, где  — синхронная частота вращения поля, а
— синхронная частота вращения поля, а  — коэффициент редукции частоты вращения.
— коэффициент редукции частоты вращения.
8 |
7 |
6, |
При достаточно высокой частоте питающей сети и малом значении коэффициента
и малом значении коэффициента представляется возможным получать низкие частоты вращения вала без применения внешних механических редукторов. В этом смысле ДКР выполняет функцию редукторного двигателя и обладает рядом преимуществ: хорошие пусковые свойства, высокое быстродействие при включении и реверсе, самоторможение и др. Синхронные ДКР могут использоваться как реактивные и шаговые двигатели.
представляется возможным получать низкие частоты вращения вала без применения внешних механических редукторов. В этом смысле ДКР выполняет функцию редукторного двигателя и обладает рядом преимуществ: хорошие пусковые свойства, высокое быстродействие при включении и реверсе, самоторможение и др. Синхронные ДКР могут использоваться как реактивные и шаговые двигатели.
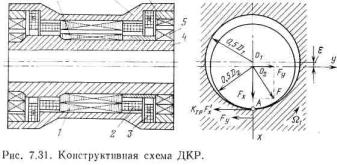
На рис. 7.31 представлена конструктивная схема синхронного ДКР с катушками осевого униполярного подмагничивания. В пазах статора / располагается двухполюсная m-фазная распределенная обмотка 2, питающаяся от сети переменного тока. Ротор 8 представляет собой пакет, набранный из листов электротехнической стали и насаженный на сердечник 4 из магнитомягкого материала, и не имеет обмоток. В отличие от обычных электрических машин ротор ДКР расположен эксцентрически относительно расточки статора, т. е. оси ротора и расточки статора не совпадают.
По торцам пакета статора расположены две тороидальные катушки 3, обтекаемые постоянным током и создающие осевой униполярный магнитный поток. Магнитопровод поперечного униполярного потока состоит из двух шихтованных пакетов 6, расположенных на торцах статора, двух шихтованных пакетов 5, расположенных на сердечнике ротора, и корпуса-магнитопровода 7.
При включении обмотки униполярного подмагничивания (катушек 3) на постоянное
336

337
напряжение вследствие эксцентриситета е возникает сила одностороннего магнитного притяжения, направленная в сторону минимального воздушного зазора, которая прижимает ротор к статору. При включении м-фазной обмотки статора в m-фазную сеть переменного тока происходит сложение магнитных полей и возникает результирующая сила одностороннего магнитного притяжения, вектор которой будет вращаться синхронно с магнитным полем ста-торной от-фазной обмотки переменного тока. Под действием этой силы магнитного притяжения ротор начнет обкатывать внутреннюю поверхность статора. Скорость обкатывания (скорость перемещения места соприкосновения ротора со статором) равна синхронной скорости поля Синхронно с полем будет вращаться и ось ротора
Синхронно с полем будет вращаться и ось ротора вокруг оси симметрии статора
вокруг оси симметрии статора . Вместе с относительно быстрым обкатыванием поверхности статора ротор будет медленно поворачиваться вокруг своей оси в противоположную сторону. Это медленное вращение ротора определяется синхронной скоростью поля и разностью длин окружностей ротора и статора. При повороте поля на 360°, когда точка соприкосновения обежит статор, ротор повернется вокруг своей оси в противоположную сторону на угол
. Вместе с относительно быстрым обкатыванием поверхности статора ротор будет медленно поворачиваться вокруг своей оси в противоположную сторону. Это медленное вращение ротора определяется синхронной скоростью поля и разностью длин окружностей ротора и статора. При повороте поля на 360°, когда точка соприкосновения обежит статор, ротор повернется вокруг своей оси в противоположную сторону на угол
где — диаметры статора и ротора. Соответственно угловая скорость вала ДКР будет
— диаметры статора и ротора. Соответственно угловая скорость вала ДКР будет
где  — коэффициент редукции скорости.
— коэффициент редукции скорости.
При нагрузке ДКР вектор результирующей силы одностороннего магнитного притяжения F в любой момент времени образует с осью, проходящей через центр системы и положение минимального зазора, некоторый угол и может быть разложен на две составляющие:  . Сила
. Сила определяет электромагнитное давление на опору, а
определяет электромагнитное давление на опору, а создает электромагнитный вращающий момент относительно оси,
создает электромагнитный вращающий момент относительно оси,
перпендикулярной плоскости рисунка и проходящей через место соприкосновения статора и ротора. Точка А на плоскости является мгновенным центром вращения, который перемещается синхронно с полем.
При обкатывании ротором внутренней поверхности статора электромагнитный вращающий момент на валу двигателя определяется как Поскольку ось симметрии ротора вращается синхронно с полем вокруг оси статора, электромагнитный
Поскольку ось симметрии ротора вращается синхронно с полем вокруг оси статора, электромагнитный
момент относительно оси статора |
и численно равен электромагнитному моменту |
|
на расточке |
— энергия магнитного поля воздушного зазора; — угол |
|
между осью х и осью МДС обмотки |
переменного тока статора. |
|
Ось у, жестко связанную с вращающейся с синхронной скоростью точкой А соприкосновения поверхностей ротора и статора, можно рассматривать как продольную ось А, а ось у — как поперечную ось При этом угол
При этом угол можно рассматривать как угол между осью полюса ротора, создаваемого униполярным под-магничивающим потоком, и осью полюса статора, создаваемого МДС т-фазной статорной обмотки.
можно рассматривать как угол между осью полюса ротора, создаваемого униполярным под-магничивающим потоком, и осью полюса статора, создаваемого МДС т-фазной статорной обмотки.
Таким образом, угол ДКР является аналогом рабочего угла синхронной машины, если униполярный поток ДКР считать аналогом основного потока возбуждения
ДКР является аналогом рабочего угла синхронной машины, если униполярный поток ДКР считать аналогом основного потока возбуждения синхронной машины. Электромагнитный момент ДКР, действующий внутри статора, аналогичен электромагнитному моменту возбужденной неявнополюсной синхронной машины:
синхронной машины. Электромагнитный момент ДКР, действующий внутри статора, аналогичен электромагнитному моменту возбужденной неявнополюсной синхронной машины:
Момент на валу многократно возрастает по сравнению с электромагнитным моментом на статоре в зависимости от коэффициента редукции:
337
338
Обычно конструкция ДКР выполняется таким образом, что ротор не имеет непосредственного соприкосновения с внутренней поверхностью статора. Между
частями двигателя предусматривается минимальный зазор Обкатывание происходит по специальным направляющим посредством катков, жестко связанных с ротором. Эксцентрическое вращение ротора ДКР обусловливает появление центробежной силы и нежелательных вибраций. Поэтому для уменьшения вибраций применяют различного вида эластичную подвеску статора.
Обкатывание происходит по специальным направляющим посредством катков, жестко связанных с ротором. Эксцентрическое вращение ротора ДКР обусловливает появление центробежной силы и нежелательных вибраций. Поэтому для уменьшения вибраций применяют различного вида эластичную подвеску статора.
Выполняться ДКР может не только с электромагнитным возбуждением от униполярного подмагничивающего потока, но и с возбуждением от постоянных магнитов. ДКР относятся к тихоходным исполнительным двигателям, для которых особенно важны пусковые режимы. Они обладают значительно лучшими пусковыми свойствами по сравнению с обычными СД и в большинстве случаев не требуют специальных пусковых устройств или частотного пуска. Как правило, ДКР пускаются при номинальной частоте питающей сети без специальных пусковых устройств. Главным образом это связано с малыми, приведенными к оси статора значениями момента инерции ротораи момента сопротивления  . Ротор ДКР с униполярным
. Ротор ДКР с униполярным подмагничиванием при отклю-
подмагничиванием при отклю-
чении напряжения статора практически не имеет выбега и четко фиксируется в определенном положении за счет потока униполярного подмагничивания.
7.11. ГИСТЕРЕЗИСНЫЕ ДВИГАТЕЛИ
Гистерезисными машинами называют машины переменного тока, основные электромагнитные процессы в которых связаны с явлением гистерезиса магнито-твердых материалов. Принципиально гистерезисные машины могут работать в режиме двигателя, генератора и электромагнитного тормоза.
На ЛА гистерезисные машины применяют в основном в качестве СД в автоматизированных приводах постоянной частоты вращения и в качестве гироскопических двигателей инерциальных навигационных систем.
Гистерезисные двигатели являются высоконадежными, бесконтактными машинами, просты по конструкции и имеют хорошие пусковые свойства. Главный их недостаток — сравнительно низкие энергетические показатели.
7.11.1. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ
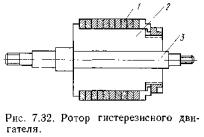
Гистерезисные двигатели имеют обычный статор синхронных или асинхронных машин, а ротор (рис. 7.32) состоит из полого цилиндра из магнитотвердого материала со специальными магнитными характеристиками, втулки и вала. В качестве материала для активного слоя ротора используются магнито-твердые материалы с явновыраженными гистерезисными свойствами. Намагничивание активного гистере-зисного слоя в отличие от намагничи-
вания постоянных магнитов осуществляется магнитным полем статора в процессе пуска двигателя. Нашли применение три типа ротора: 1) ротор, в котором активный гистерезисный слой (полый цилиндр) насажен на магни-томягкую неявноили явнополюсную втулку и намагничивается в радиальном направлении; 2) ротор, в котором втулка выполнена из немагнитного материала (алюминий, пластмассы и др.), а активный
338

339
гистерезисный слой намагничивается в тангенциальном направлении; 3) ротор, в котором втулка отсутствует и активный слой насажен непосредственно на вал.
Во всех случаях активный гистерезисный слой может выполняться в зависимости от типа гистерезисного материала сплошным или набранным из отдельных тонких колец (шихтованным).
Гистерезисные двигатели работают как в асинхронном режиме (в процессе разбега), когда электромагнитный (гистерезисный) момент создается за счет гистерезиса активного слоя ротора при циклическом перемагничивании магнитным полем статора, так и в синхронном режиме, когда синхронный электромагнитный момент создается в результате взаимодействия поля статора с намагниченным в процессе пуска ротором аналогично СД с возбуждением от постоянных магнитов.
Допустим, что происходит циклическое перемагничивание гистерезисного слоя ротора в пульсирующем магнитном поле. Если считать, что в идеальном случае электрическое сопротивление магнитотвердого материала бесконечно велико, то вихревые токи в гистерезисном слое равны нулю и угол сдвига фаз во времени между первыми гармониками магнитного потока Ф и потребляемого из сети тока
между первыми гармониками магнитного потока Ф и потребляемого из сети тока будет определяться потерями на гистерезис. Между МДС обмотки
будет определяться потерями на гистерезис. Между МДС обмотки  и потоком
и потоком будет иметь место угол сдвига фаз во времени
будет иметь место угол сдвига фаз во времени зависящий от потерь на гистерезис в материале.
зависящий от потерь на гистерезис в материале.
Намагничивающий ток |
= |
создает магнитный поток, а активная |
составляю- |
|
|
щая тока |
|
обусловлена потерями на гистерезис. |
Угол  называют углом магнитного (гистерезисного) запаздывания. Очевидно, что чем больше потери на гистерезис, тем больше угол
называют углом магнитного (гистерезисного) запаздывания. Очевидно, что чем больше потери на гистерезис, тем больше угол . В случае идеального магнитомягкого материала потери на гистерезис равны нулю и
. В случае идеального магнитомягкого материала потери на гистерезис равны нулю и
Электромагнитный момент определяется активной составляющей напряженности поля и тока, а реактивная составляющая определяет намагничивающий ток, который тем больше, чем больше реактивная составляющая напряженности поля. Поэтому при выборе гистерезисных материалов главным критерием является величина и чем выше
и чем выше , тем лучше материал для роторов гистерезисных машин. Если петля
, тем лучше материал для роторов гистерезисных машин. Если петля
гистерезиса |
имеет |
прямоугольную |
форму |
с |
площадью |
петли |
, |
|
и |
Такой материал |
был бы идеальным для |
||
гистерезисных машин. Качество реальных гистерезисных материалов оценивается степенью приближения реальной петли гистерезиса к прямоугольной форме.
В гистерезисном двигателе циклическое перемагничивание гистерезисного слоя ротора происходит во вращающемся магнитном поле статора. В этом случае явление магнитного (гистерезисного) запаздывания, связанное с циклическим перемагничиванием гистерезисного слоя, проявляется в том, что между пространственными векторами МДС обмотки статора и потока ротора
и потока ротора при синхронном их вращении с частотой вращения
при синхронном их вращении с частотой вращения будет иметь место пространственный угол
будет иметь место пространственный угол также определяемый потерями на гистерезис в гистерезисном слое. Это означает, что ось полюсов статора опережает ось наведенных полюсов ротора на угол
также определяемый потерями на гистерезис в гистерезисном слое. Это означает, что ось полюсов статора опережает ось наведенных полюсов ротора на угол  при синхронном их вращении, в результате чего и
при синхронном их вращении, в результате чего и
возникает гистерезисный |
электромагнитный момент, определяемый соотношением |
где —■ конструктивный |
коэффициент. |
Под действием гистерезисного момента ротор, вращаясь сначала асинхронно, разбегается до синхронной частоты вращения. Гистерезисный момент в процессе пуска постоянен и не зависит от частоты вращения ротора вплоть до вхождения в синхронизм. Постоянство момента в процессе пуска определяет хорошие пусковые свойства гистерезисных двигателей и является их главным преимуществом перед другими типами синхронных двигателей.
339

|
340 |
7.11.2. МЕХАНИЧЕСКАЯ |
ХАРАКТЕРИСТИКА |
ГИСТЕРЕЗИСНЫХ МАШИН |
|
На рис. 7.33 приведена механическая характеристика идеализированной гистерезисной машины, в роторе которой отсутствуют вихревые токи. Часть
характеристики |
, |
расположенная в первом квадранте, соответствует |
|
двигательному |
режиму |
работы. |
|
Разбег ротора |
начинается с точки |
, в которой гистерезисный слой |
|
перемагничивается с частотой |
— скольжение ротора при При этом |
||
наведенные полюсы ротора с синхронной частотой вращения перемещаются относительно
неподвижного ротора, перемагничивая его циклически с частотой |
, а угол между |
|||||
полюсами статора и ротора равен |
. Ротор начинает разгоняться, и в некоторой точке 2 |
|||||
имеет частоту вращения |
и |
скольжение |
При |
этом |
полюсы ротора |
|
вращаются относительно |
него с |
частотой |
вращения |
|
, |
перемагничивая |
гистерезисный слой с частотой |
. |
Поскольку угол |
не |
зависит от частоты |
||
перемагничивания, то в точке 2 угол между осями полюсов статора и ротора остается
прежним и равным На участке характеристики 2-3 скольжение ротора уменьшается, |
||||
уменьшается частота перемагничивания ротора, а угол по-прежнемуостается неиз |
||||
менным. В точке 3 ротор входит в синхронизм с полем |
||||
статора, |
скольжение |
и |
циклическое |
|
перемагничивание гистерезисного слоя прекращается. |
||||
При |
этом |
гистерезисный |
слой |
оказывается |
намагниченным в магнитном поле статора до магнитной |
||||
индукции, соответствующей вершине петли гистерезиса, |
||||
по которой он перемагничивался в асинхронном режиме |
||||
в процессе пуска двигателя. В точке 3 гистерезисный |
||||
слой становится неявнополюсным постоянным магнитом, |
||||
намагниченность |
которого |
ниже намагниченности |
||
постоянных магнитов, а гистерезисный двигатель |
||||
(ГД) представляет собой недовозбужденный СД с возбуждением от постоянных магнитов.
Снижение электромагнитного момента на участке характеристики 3-4 |
|
||
происходит в результате уменьшения рабочего угла |
синхронного двигателя . В |
||
точке 4 наступает установившийся |
режим работы при |
— |
|
номинальные значения момента сопротивления |
|
|
|
В гистерезисном двигателе |
максимальный |
(критический) рабочий |
угол |
синхронного режима не превышает угла гистерезисного запаздывания
не превышает угла гистерезисного запаздывания в отличие от обычных синхронных неявнополюсных двигателей, у которых
в отличие от обычных синхронных неявнополюсных двигателей, у которых = я/2. Современные гистерезисные магнитотвердые материалы позволяют получить
= я/2. Современные гистерезисные магнитотвердые материалы позволяют получить  При
При  двигатель выходит из синхронизма и вновь переходит в асинхронный режим. Реально в асинхронном режиме помимо гистерезисного
двигатель выходит из синхронизма и вновь переходит в асинхронный режим. Реально в асинхронном режиме помимо гистерезисного
момента дополнительно возникает асинхронный момент за счет вихревых токов в гистерезисном слое аналогично асинхронным двигателям со сплошным ферромагнитным
ротором (пунктир |
Г-3 на рис. 7.33). Асинхронный момент ; увеличивает пусковой |
момент двигателя |
и зависит от выпол- |
нения гистерезисного слоя. При сплошном гистерезисном слое асинхронный момент больше, чем при шихтованном, в котором вихревые токи практически несущественны. Участок идеализированной характеристики 1-8 соответствует вращению ротора против поля статора, т. е. режиму электромагнитного гистерезисного тормоза (ГТ), в котором тормозной момент постоянен независимо от частоты вращения. Это важное преимущество гистерезисных тормозов иногда используется в системах электроавтоматики. Участки 5-6 и 6-7 соответствуют генераторному режиму: СГ с возбуждением от постоянных магнитов и асинхронному ги-стерезисному генератору (ГГ), работающему параллельно с сетью. В силу низких энергетических показателей
постоянен независимо от частоты вращения. Это важное преимущество гистерезисных тормозов иногда используется в системах электроавтоматики. Участки 5-6 и 6-7 соответствуют генераторному режиму: СГ с возбуждением от постоянных магнитов и асинхронному ги-стерезисному генератору (ГГ), работающему параллельно с сетью. В силу низких энергетических показателей
340