

УстрАСУ / Конспект УАСУ
.pdf211
неизбежными потерями в активных сопротивлениях обмоток машин, в стали магнитопроводов, а также механическими потерями. Условно потери в двигателе можно
представить в виде суммы переменных  и постоянных
и постоянных  потерь:
потерь:
(1.1)
где  — создаются рабочим током в активных сопротивлениях цепей статора и ротора и потому зависят от нагрузки. Соответствующие электромагнитному моменту
— создаются рабочим током в активных сопротивлениях цепей статора и ротора и потому зависят от нагрузки. Соответствующие электромагнитному моменту
 двигателя и скольжению потери в меди вторичной цепи (ротора) определяются следующим соотношением:
двигателя и скольжению потери в меди вторичной цепи (ротора) определяются следующим соотношением:
(1.2)
При строгом подходе выражение (1.2) включает полные электрические потери в роторе. Однако при работе на линейном участке естественной характеристики потери в стали составляют всего 1—2 % полных электрических потерь. При работе на линейных
участках характеристик двигателя с введенными |
в цепь ротора добавочными |
сопротивлениями даже при s = 1 эти потери составляют |
лишь 3—4 % потерь. |
Рис. 1. Схема замещения асинхронного двигателя с вынесенным контуром
намагничивания из соотношения (1.2) с допустимой погрешностью можно получить следующее выражение для переменных потерь в машине:
(1.3)
где r'в, r'r — активное сопротивление обмоток соответственно статора и ротора,
приведенное к статору. Здесь и далее используется уточненная Г-образная схема замещения, изображенная на рис. 1.
В двигателях с фазным ротором для пуска и регулирования скорости можно вводить в
цепь ротора резисторы. Поэтому в общем случае потери перераспределяются между внешними сопротивлениями rа и сопротивлениями обмоток двигателя:
(1.4)
211
212
причем  — суммарное активное сопротивление цепи ротора,
— суммарное активное сопротивление цепи ротора,
приведенное к статору, а sР — текущее скольжение на реостатной характеристике (рис. 2).
Разделив почленно выражение (1.4) на номинальные потери в меди от рабочего тока
получим следующее выражение потерь в относительных единицах:
(1.5)
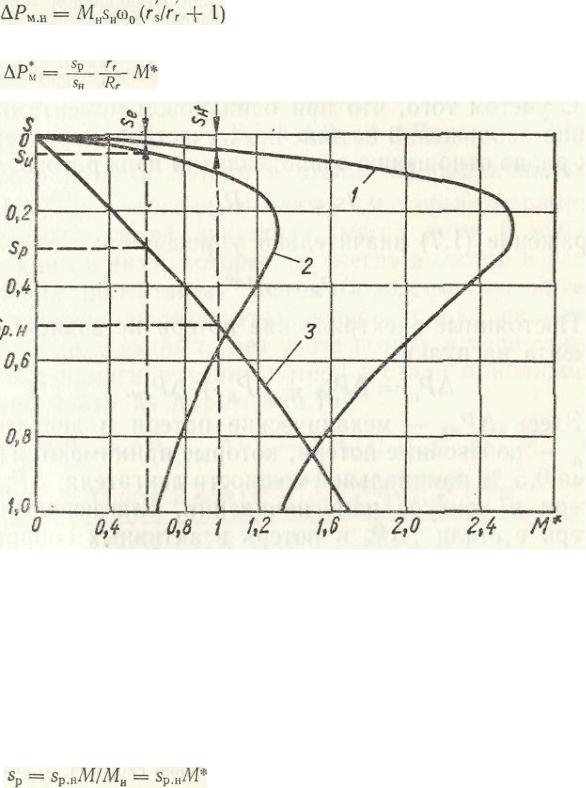
Рис. 2. Характеристики двигателя МТВ412-8:
/ — естественная; 2 — при снижении напряжения до 0,7 , 3 —при введении в цепь
, 3 —при введении в цепь
ротора сопротивления  ,
,
где Мн, sН — номинальные момент и скольжение асинхронного двигателя.
Выражение (1.5) справедливо также при регулировании напряжения на зажимах статора
[39, 48].
На линейном участке механической характеристики (рис. 2) скольжение и момент связаны выражением
(1.6)
Причем  — скольжение двигателя на реостатной характеристике при
— скольжение двигателя на реостатной характеристике при
212

213
номинальном моменте, поэтому относительное значение переменных потерь в двигателе,
работающем на линейном участке характеристики, можно вычислить по формуле
(1.7)
С учетом того, что при одинаковом моменте отношение скольжений на линейных участках характерио-тик равно отношению сопротивлений цепи ротора, т. е.
(1.8)
выражение (1.7) значительно упрощается:
(1.9)
Постоянные электрические потери не зависят от момента нагрузки:
Здесь  — механические потери в двигателе;
— механические потери в двигателе;  — добавочные потери,
— добавочные потери,
которые принимаются равными 0,5 % номинальной мощности двигателя;  — потери в контуре намагничивания, слагающиеся из потерь в стали
— потери в контуре намагничивания, слагающиеся из потерь в стали  и потерь в активных сопротивлениях обмотки статора от тока намагничивания в соответствии со схемой замещения рис. 1.
и потерь в активных сопротивлениях обмотки статора от тока намагничивания в соответствии со схемой замещения рис. 1.
При изменении нагрузки от холостого хода до номинальной потери  несколько уменьшаются вследствие снижения магнитного потока машины. На естественной характеристике изменение постоянных потерь составляет всего 4—8 % [28], поэтому им обычно пренебрегают. Однако в общем случае при регулировании скорости в широких пределах изменение постоянных потерь должно быть учтено.
несколько уменьшаются вследствие снижения магнитного потока машины. На естественной характеристике изменение постоянных потерь составляет всего 4—8 % [28], поэтому им обычно пренебрегают. Однако в общем случае при регулировании скорости в широких пределах изменение постоянных потерь должно быть учтено.
Изменение механических потерь не зависит от способа регулирования скорости, а
добавочные полагаем неизменными, поэтому в качестве критерия при сравнении различных способов регулирования рационально принять электрические потери в двигателе:
|
|
|
(1.10) |
|
В свою очередь, потери в контуре намагничивания |
(рис. 1) состоят из потерь в |
|||
меди обмотки статора от тока намагничивания |
, потерь в стали статора |
и |
||
потерь в стали ротора |
, т. е. |
|
|
|
|
|
|
(1.11) |
|
Для расчета потерь в |
стали, пропорциональных |
необходимо |
знать |
|
213

214
некоторые параметры отдельных частей двигателя (масса ярма и зубцов, индукция в них),
которые не всегда имеются в распоряжении проектанта, поэтому представляет интерес возможность расчета этих потерь только на основе каталожных данных. Без учета потерь в меди статора от тока намагничивания потери в стали приближенно можно найти из выражений [5]
(1.12)
где 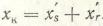 .
.
Последнее выражение можно представить в следующем виде:
(1.13)
где  — номинальные потери в стали статора. Кроме потерь в стали, часто необходимо учитывать также потери в меди статора от тока намагничивания, который,
— номинальные потери в стали статора. Кроме потерь в стали, часто необходимо учитывать также потери в меди статора от тока намагничивания, который,
например, в краново-металлургических двигателях достигает 40—70 % номинального тока.
Если допустить, что с изменением нагрузки ток намагничивания остается постоянным, то эквивалентное сопротивление стали при изменении скорости можно определить из следующего выражения [39]:
(1.14)
где  — эквивалентное сопротивление стали, соответствующее потерям на холостом ходу. Тогда полные потери в контуре намагничивания
— эквивалентное сопротивление стали, соответствующее потерям на холостом ходу. Тогда полные потери в контуре намагничивания
(1.15)
В последней записи удобнее вместо номинальных потерь в стали статора  ,
,
которые тоже обычно неизвестны, использовать потери в контуре намагничивания на холостом ходу  , определяемые по каталожным данным:
, определяемые по каталожным данным:
(1.16)
Подставив в формулу (1.15) вместо потерь в стали статора их значение, определенное
214

215
через  получим:
получим:
(1.17)
С изменением скорости ЭДС не остается постоянной. Ее можно определить по формуле
Отсюда
(1.18)
При подстановке соотношения (1.18) в формулу (1.17) с учетом выражения (1.5)
получаем следующую зависимость потерь в контуре намагничивания от момента нагрузки и скольжения:
(1.19)
Таким образом, выражение для расчета полных электрических потерь в двигателе принимает вид
(1.20)
Так как потери существенно зависят от отношения скольжений, то при использовании выражения (1.20) рекомендуется уточнять номинальное скольжение двигателя по
номинальному току ротора 
(1.21)
При этом нужно иметь в виду, в что Г-образной схеме замещения
С помощью выражений (1.5), (1.9) и (1.20) можно рассчитывать электрические потери
215

216
в двигателе, а также оценивать различные способы регулирования скорости по этому
показателю.
ЛЕКЦИЯ 28. КЛАССИФИКАЦИЯ СПОСОБОВ РЕГУЛИРОВАНИЯ
СКОРОСТИ
Традиционно различают способы регулирования! скорости, при которых воздействие на двигатель осу-] ществляется или со стороны статора, или со стороны ротора.
К числу первых относятся; введение в цепь статора активных или реактивных сопротивлений; регулирование амплитуды подводимого к двигателю напряжения;
регулирование амплитуды и частоты напряжения; изменение числа пар полюсов.
Скорость можно регулировать, если воздействовать на цепь ротора: введением в цепь ротора активного, индуктивного или активно-индуктивного сопротивления; введением в
цепь ротора добавочной ЭДС, имеющей ту же частоту, что и основная частота ротора;
введением в цепь выпрямленного тока ротора встречной ЭДС постоянного тока с передачей или без передачи энергии скольжения в сеть переменного тока.
Часто используется сочетание способов, когда реализуется наложение механических характеристик (например, изменение степени несимметрии подводимого напряжения),'
или регулирование амплитуды напряжения с одновременным введением в цепь ротора резисторов и т. д.
Для анализа влияния способов регулирования скорости на вид механических характеристик и энергетические показатели воспользуемся понятием абсолютного скольжения
(1.22)
где  — скорость идеального холостого хода на характеристике соответственно естественной и регулировочной. Эта величина, характеризующая наклон ме-
— скорость идеального холостого хода на характеристике соответственно естественной и регулировочной. Эта величина, характеризующая наклон ме-
ханических характеристик при разных способах регулирования, соответствует значению переменных потерь в цепи ротора машины для данного момента нагрузки. При сравнении способов регулирования целесообразно ограничить работу двигателя общими условиями, а именно: работа осуществляется с постоянным моментом нагрузки и на
линейных участках регулировочных механических характеристик  , где
, где  — критическое значение скольжения. С учетом последнего условия справедлива следующая
— критическое значение скольжения. С учетом последнего условия справедлива следующая
216

217
упрощенная зависимость между скольжением и моментом:
— критическое значение момента, причем  , —действующее значение фазного напряжения сети (рис. 1). Подставив выражения (1.24) и (1.25) в формулу (1.23), опишем линейную часть характеристики в двигательном режиме следующей зависимостью:
, —действующее значение фазного напряжения сети (рис. 1). Подставив выражения (1.24) и (1.25) в формулу (1.23), опишем линейную часть характеристики в двигательном режиме следующей зависимостью:
(1.26)
С помощью приведенных выше выражений можно оценить способы регулирования скорости по значению электрических потерь в двигателе и относительному падению скорости (скольжению).
Регулирование  или не изменяет скольжения при
или не изменяет скольжения при  , или изменяет его незначительно. Увеличение
, или изменяет его незначительно. Увеличение  в k раз сопровождается незначительным снижением скольжения, так как в соответствии с выражением (1.26)
в k раз сопровождается незначительным снижением скольжения, так как в соответствии с выражением (1.26)
(1.28)
Здесь  — скольжение соответственно на естественной и регулировочной характеристиках. Аналогичное выражение получаем при регулировании активного сопротивления цепи статора, причем при его увеличении незначительно возрастает скольжение:
— скольжение соответственно на естественной и регулировочной характеристиках. Аналогичное выражение получаем при регулировании активного сопротивления цепи статора, причем при его увеличении незначительно возрастает скольжение:
(1.29)
В соответствии с выражениями (1.2) и (1.3) также незначительно изменяются и потери в двигателе.
Расчетная естественная характеристика (кривая 1) двигателя МТВ412-8 (22 кВт), а
также характеристики, полученные при введении индуктивного сопротивления k = 2 (кривая 2) и активного сопротивления в цепь статора k = 4 (кривая 3), показаны на рис. 3.
217
218
Снижение подводимого к двигателю напряжения в & раз сопровождается в соответствии с выражением (1.26) увеличением скольжения sH по сравнению со скольжением на естественной характеристике se:
(1.30)
Согласно формуле (1.3), потери в меди возрастают также в k2 раз. Расчетные
характеристики при номинальном (кривая 1) и пониженном до 70 % напряжениях (кривая
2) показаны на рис. 2. |
|
|
|
|
|
|
При |
регулировании |
скорости |
изменением |
частоты |
и |
одновременно |
пропорциональным изменением напряжения |
= |
const |
критическое |
|||
абсолютное скольжение [48] |
|
|
|
|
|
|
где f* — относительное значение частоты. |
|
|
|
|||
(1.31)
Рис. 3. Естественная (кривая /) и искусственные (кривые 2 и 3) характеристики асинхронного двигателя МТВ412-8
218

219
Если пренебречь сопротивлением rs, то критическое абсолютное скольжение не
зависит от частоты:
Однако в общем случае
(1.32)
т. е. снижение частоты сопровождается некоторым уменьшением скольжения и,
следовательно, потерь в роторе.
При переключении числа пар полюсов для сохранения неизменными потерь в меди от рабочего тока магнитный поток машины должен оставаться постоянным [28}. Тогда потери в роторе двигателя, развивающего поминальный момент при работе с разными скоростями:
Несложные преобразования подтверждают, что остается неизменным и абсолютное скольжение.
В реальных многоскоростных двигателях серии MTKF, МТКН не всегда выполняется условие постоянства магнитного потока, следовательно, не соблюдается и постоянство потерь в машине.
При реостатном регулировании увеличение активного сопротивления цепи ротора в k
раз сопровождается соответствующим увеличением скольжения. При этом способе регулирования скорости магнитный поток Ф остается практически неизменным, поэтому в соответствии с выражением для электромагнитного момента
(1.33)
неизменным остается и ток ротора (при работе на линейном участке характеристики,
когда коэффициент мощности цепи ротора cos  ). Следовательно, полные потери в
). Следовательно, полные потери в
роторе возрастают тоже в k раз.
Таким образом, в зависимости от значения потерь от рабочего тока все способы регулирования скорости можно разделить на две группы. К первой группе следует отнести такие способы, при которых практически не изменяется абсолютное скольжение и, следовательно, не увеличиваются потери в цепи ротора. Однако они или не позволяют глубокой плавно регулировать скорость двигателя (переключение числа пар полюсов,
введение реактивных сопротивлений в цепи статора или ротора), или требуют сложных,
219
220
дорогих и пока недостаточно надежных установок (частотное управление, каскадные схемы и др.), которые рационально применять в установках большой мощности и при длительном регулировании скорости.
Ко второй группе относятся параметрические способы регулирования скорости, при которых существенно изменяется такой параметр, как абсолютное скольжение, и,
следовательно, электрические потери в цепях двигателя.
Глубокое регулирование скорости введением индуктивных сопротивлений в цепь асинхронного двигателя, активного сопротивления в статор и изменением подводимого напряжения невозможно на линейной части характеристик, а достигается лишь в том случае, когда двигатель работает при скольжениях, больших критического. Последнее обстоятельство приводит к значительному увеличению потерь и нагрева двигателя. В
соответствии с выражением (1.3) потери в меди обмоток сохраняются неизменными, если регулирование скорости сопровождается изменением момента нагрузки обратно
пропорционально скольжению. Поэтому уже при скольжении  момент не
момент не
должен превышать М*и =0,1. В связи с тем что для большинства двигателей номинальное
скольжение составляет 0,03...0,05, |
уже нахолостом |
ходу |
потери |
в меди |
равны |
|||||||
номинальным, |
а возможный |
диапазон регулирования |
скорости |
составляет |
всего |
|||||||
(1,5...2) : 1. |
Следовательно, |
электропривод с параметрическим управлением может |
||||||||||
найти |
применение |
для |
механизмов |
с |
«вентиляторными» |
характеристиками |
||||||
(вентиляторы, |
центробежные насосы и др.) |
при |
неглубоком регулировании скорости. |
|||||||||
Большой |
диапазон |
регулирования |
скорости |
может быть достигнут при управлении |
||||||||
двигателями с |
контактными |
кольцами. |
При |
глубоком |
регулировании скорости |
|||||||
включением в цепь ротора резисторов хотя и сохраняются суммарные потери больше номинальных, однако нагрев обмоток уменьшается.
Рассмотрим электроприводы второй группы, регулирование скорости которых
осуществляется с помощью тиристорных регуляторов |
напряжения (ТРН) статора или |
|||
тока (ТРТ) ротора |
асинхронного двигателя. |
Вследствие |
повышенных потерь |
|
скольжения эти |
способы рационально применять для механизмов повторно- |
|||
кратковременного |
режима с непродолжительным временем работы на регулировочных |
|||
характеристиках (подъемно-транспортные |
машины, |
вспомогательные механизмы |
||
прокатных станов и др.). |
|
|
|
|
ЛЕКЦИЯ 29. |
АСИНХРОННЫЙЭЛЕКТРОПРИВОД |
С ТИРИСТОРНЫМ |
||
РЕГУЛЯТОРОМ НАПРЯЖЕНИЯ СТАТОРА
1. СХЕМЫ И ОСНОВНЫЕ ПАРАМЕТРЫ ТРН
Тиристорный регулятор напряжения — это в общем случае тиристорный коммутатор,
220