

УстрАСУ / Конспект УАСУ
.pdf231
Здесь xc — емкостное сопротивление конденсатора; Z1, Z2 — эквивалентные сопротивления фазы двигателя токам прямой и обратной последовательностей;
— единичный вектор. В свою очередь, эквивалентные сопротивления рассчитываются по схеме замещения рис. 1 и следующим формулам;
(2.10)
231

232
Для неподвижного двигателя (s = 1) все выражения значительно упрощаются, так как
Z1 = Z2 =  . В этом случае момент
. В этом случае момент
двигателя рассчитывается по следующим формулам;
232
233
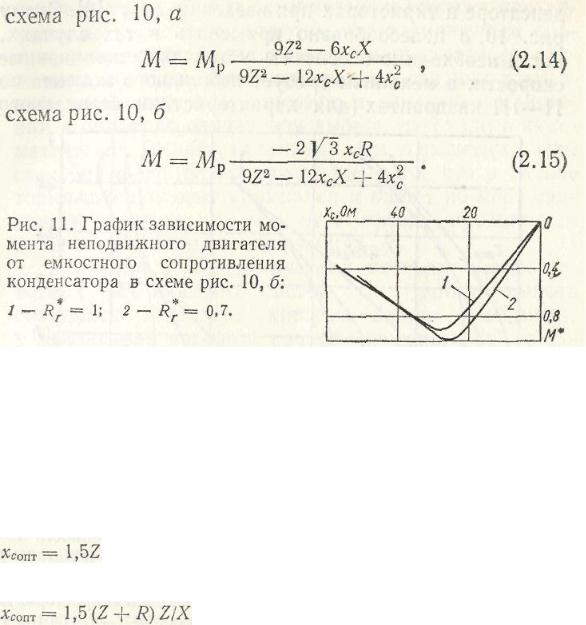
Расчеты по формулам (2.14) и (2.15) убедили, что наибольшее значение отрицательного момента двигателя, включенного по схеме рис. 10, а, при реальных сопротивлениях цепи ротора (0,5—Rn) составляет 20—25 % номинального, хотя при включении по схеме рис. 10, б он может достигать номинального значения [14]. На рис. 11
показаны рассчитанные по формуле (2.15) зависимости М — f (xc) неподвижного двигателя МТН111-6 при закрытых тиристорах и двух значениях Rr При некотором оптимальном значении хс двигатель развивает максимальный момент, причем
(2.16)
Двигатель, включенный по схеме рис. 10, а, развивает наибольший момент при
(2.17)
Существуют выражения для расчета моментов неподвижного двигателя при включении различных xc а также токов в фазе двигателя, напряжений на конденсаторе и тиристорах при введении  [6]. Схему рис. 10, а целесообразно применять в тех случаях, когда необходимо обеспечить устойчивые пониженные скорости, а механизм требует небольшого момента во II—III квадрантах (для характеристики безопасного
[6]. Схему рис. 10, а целесообразно применять в тех случаях, когда необходимо обеспечить устойчивые пониженные скорости, а механизм требует небольшого момента во II—III квадрантах (для характеристики безопасного
233
234
спуска подъемных механизмов или необходимости соз дания ограниченного тормозного момента при переходе с высокой скорости па пониженную). Схема рис. 10, б
тоже обеспечивает устойчивые пониженные скорости. Рассмотрим особенности ее
работы |
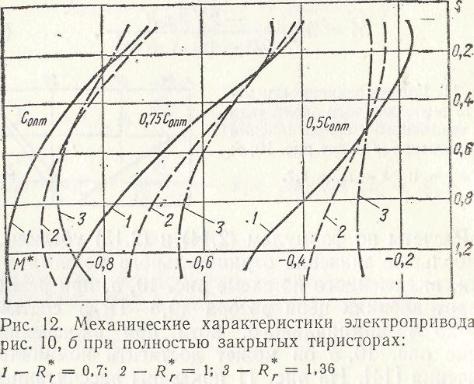
в тормозном режиме. На рис. 12 показаны расчетные графики зависимости |
момента |
М* от скольжения s двигателя МТН1П-6 при подключении конденсаторов |
различ ной емкости и закрытых тиристорах для трех сопротивлений цепи ротора R* = 0,7;
1,0 и 1,36. При указанных сопротивлениях оптимальная емкость составляет
соответственно 127, 111,5 и 104 мкФ. Торможение по характеристикам рис. 12
имеет неоспоримые преимущества по сравнению с механическим торможением, когда момент механического тормоза практически не зависит от скорости, и с торможением противовключением, когда момент уменьшается со снижением скорости. Даже при равных средних тормозных моментах, т. е. одинаковом времени торможения и примерно одинаковом выбеге, нагрузки в кинематических звеньях механизма при торможении этим способом значительно ниже из-за того, что в начале торможения момент минимален и растет по мере снижения скорости, причем этот эффект проявляется сильнее при меньших значениях Rr.
Нагрузки в кинематических звеньях высокочастотных механических систем, т. е.
таких, частота свободных колебаний которых велика (например, у механизмов поворота
кранов, экскаваторов), определяются начальным значением тормозного момента  И
И
достигают двухкратного ее значения [12, 23J. Расчеты переходных режимов торможения
234

235
разными способами для механизмов с разнообразными параметрами позволили сравнить основные показатели торможения. Например, сравнивалось торможение при несимметричном управлении асинхронным двигателем (схема рис. 10, б) с 0,75 Сопт и
 (рис. 12), а также торможение противовключением и электромагнитным тормозом, причем во всех случаях обеспечивался одинаковый средний тормозной момент.
(рис. 12), а также торможение противовключением и электромагнитным тормозом, причем во всех случаях обеспечивался одинаковый средний тормозной момент.
Оказалось, что при практически неизменном времени торможения и увеличении тормозного пути на 8—9 % торможение в режиме несимметричного управления снижает ударные нагрузки на 27 % по сравнению с механическим торможением и на 43 % — с
режимом противовключения.
Расчеты напряжений и токов в фазах, а также экспериментальные исследования схемы рис. 10, б свидетельствуют о том, что с уменьшением скорости все напряжения, как и момент двигателя, растут, причем напряжения на фазах двигателя и конденсаторе при скорости 10—90 % номинальной не превышают фазного напряжения сети. Напряжение на тиристорах растет с увеличением Rr. Для реальных приводов тиристоры необходимо выбирать 8—9-го класса. Лишь при  , оптимальной емкости конденсатора и низких скоростях ток в одной из фаз превышает номинальный на 8—10 %; при иных условиях токи всех фаз меньше номинального.
, оптимальной емкости конденсатора и низких скоростях ток в одной из фаз превышает номинальный на 8—10 %; при иных условиях токи всех фаз меньше номинального.
Таким образом, схему подключения конденсатора к электроприводу с несимметричным ТРН по рис. 10, б можно использовать в тех же условиях, что и схему рис. 10, а. Кроме того, она может примениться тогда, когда требуется интенсивное, но плавное торможение механизма,
Схему в соответствии с рис. 10, в целесообразно применять при глубоком регулировании скорости (20 : I и более), получении жестких регулировочных механических характеристик, а также необходимости обеспечения тормозных характеристик по рис. 12.
ЛЕКЦИЯ 30. РАСЧЕТ ПОТЕРЬ, ВЫБОР ДВИГАТЕЛЯ В СИСТЕМЕ ТРН—АД
При регулировании напряжения на статоре двигателя увеличивается скольжение, а
это сопровождается пропорциональным увеличением потерь в меди машины от рабочего тока (1.5). Таким образом, эти потери зависят от диапазона регулирования скорости
(2.18)
Такой способ регулирования целесообразно применять для двигателей с фазным ротором: введение резисторов в цепь ротора, как это следует из зависимости (1.5),
позволяет вынести часть потерь из машины и тем самым уменьшить ее нагрев.
Следовательно, если одновременно с изменением скольжения регулировать значение
235
236
сопротивления добавочного резистора
(2.19)
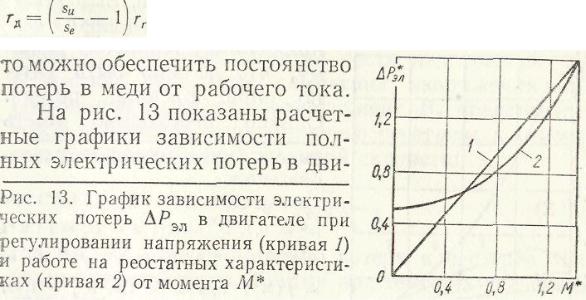
гателе, работающем на реостатных характеристиках (Rr = 0,2..1), а также при питании его регулируемым синусоидальным напряжением, от момента. При некоторых значениях момента потери в двигателе, работающем при пониженном напряжении, меньше, чем при работе на реостатной характеристике за счет снижения потерь в контуре намагничивания.
Таким образом, совместное регулирование напряжения и сопротивления в роторе позволяет оптимизировать управление по минимуму потерь в некотором диапазоне
нагрузок [3].
При регулировании скорости асинхронного двигателя с помощью тиристорных регуляторов электрические потери возрастают также из-за наличия высших гармонических напряжений и тока. Кроме того, при расчете мощности двигателя следует учитывать ухудшение теплоотдачи у самовентилируемых машин, а при использовании
несимметричного (по фазам)управления — также |
неравномерность нагрева фазных |
обмоток. |
|
Особенно сложен выбор двигателя при работе его с несимметричным регулятором
напряжения 2ТРН {см. рис. 4, е и 10). Напряжения и токи прямой |
и обратной |
последовательностей приводят к более напряженному тепловому режиму, |
что должно |
быть учтено при расчете потерь.Однако необходимо иметь |
|
236
237
в виду, что двигатель при этом нагревается неравно мерно вследствие неодинаковых потерь, выделяемы в фазах статора, и конечных значений тепловых проводимостей между отдельными его частями. В результате средние потери в двигателе не соответствую температуре наиболее нагретой части машины. У двигателей с фазным ротором требуемая мощность может определяться как нагревом обмотки статора, так и повышенным нагревом фаз ротора, причем расположение и температура наиболее нагретой обмотки зависит от степени несимметрии, скорости двигателя и сопротивления цепи ротора [33].
Для оценки влияния неравномерности нагрева Я учета снижения теплоотдачи при работе с пониженной скоростью составлена программа расчета темпера туры отдельных частей машины. В основу расчета положена многоступенчатая теория нагрева асинхронного двигателя. Согласно этой теории, в рассматриваемом случае двигатель разделен на 13 самостоятельных в тепловом отношении частей. На основании расчета
получены коэффициент превышения температуры машины  от снижения теплоотдачи при регулировании скорости и коэффициент превышения температуры наиболее нагретой
от снижения теплоотдачи при регулировании скорости и коэффициент превышения температуры наиболее нагретой
237
238
части над средней  вследствие искажения симметрии напряжения при постоянной скорости. Коэффициент
вследствие искажения симметрии напряжения при постоянной скорости. Коэффициент  представляет собой отношение относительного перегрева к относительным потерям при заданной скорости:
представляет собой отношение относительного перегрева к относительным потерям при заданной скорости:
(2.20)
где  — соответственно потери и перегрев наиболее нагретой части обмотки
— соответственно потери и перегрев наиболее нагретой части обмотки
при текущих значениях скорости и степени несимметрии; АРС и тс — соответственно потери и перегрев обмотки при симметричном напряжении. Так как момент двигателя
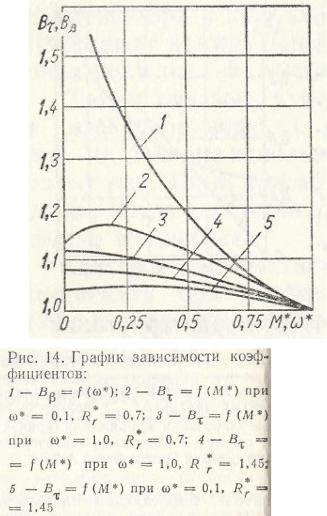
также определяется степенью несимметрии напряжения, то график зависимости  от
от
несимметрии напряжения изображен на рис. 14 как функция от значения развиваемого
двигателем |
момента М*. Там же показан график зависимости коэффициента |
от |
скорости |
, причем |
|
|
(2.21) |
|
где |
__ соответственно потери и перегрев при симметричном напряжении и |
|
номинальной скорости. В частности, при регулировании скорости двигателя с помощью
симметричных |
ТРН |
|
|
. Коэффициенты |
позволяют |
|
учесть неравно-ерность |
нагрева |
и |
ухудшение |
охлаждения |
при проверке |
|
предварительно |
выбранного двигателя |
по методу эквивалентных потерь. В этом случае |
||||
формула для расчета эквивалентных потерь принимает вид: |
|
|||||
|
|
|
|
|
(2.22) |
|
где |
— соответственно потери в машине и время работы на отдельных |
|||||
участках нагрузочной диа-граммы.
В соответствии с проведенными расчетами по предложенной методике можно рекомендовать требуемое завышение мощности для некоторых конкретных условий.
Например, при использовании такой нагрузочной диаграммы, когда половина времени pal
бота осуществляется с минимальным моментом сопротивления (на холостом ходу),
эквивалентные потери в двигателе |
, питающемся от 2ТРН, возрастают примерно на 0,6 |
|
% на каждый процент времени ран боты с пониженной скоростью (0,1 |
), если в цепь] |
|
238
239
ротора включается сопротивление 70—80 % номинального. Так, если при указанных условиях 30 % всего рабочего времени цикла привод эксплуатируется. с пониженной скоростью, то это превышение составляет 18 %. Естественно, при снижении Rr влияние несимметрии питающего напряжения возрастает.
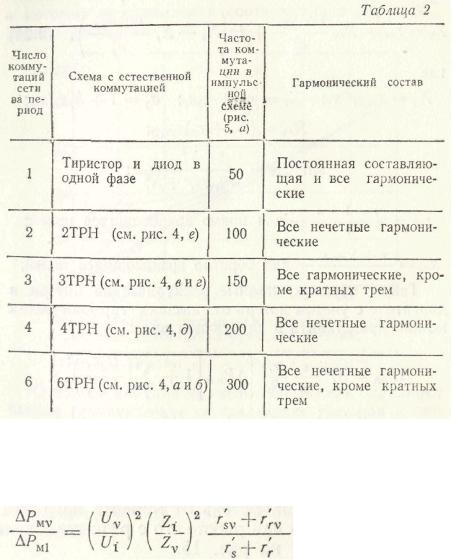
Процессы коммутации вентилей обусловливают несинусоидальность токов и напряжений, которые в общем случае содержат спектр различных гармоник определяемый количеством управляемых вентилей в схемах с естественной коммутацией и частотой коммутации при импульсном управлении. При частоте коммутации, кратной частоте сети, наиболее прост0 реализуется синхронизация и управление тиристорами.
Тогда соблюдается строгое соответствие числа коммутаций за период и гармонического состава в схемах рис. 4 и 5. Данные по гармоническому составу сведены в табл. 2.
Дополнительные потери при искажении формы напряжения удобнее всего учесть,
рассчитав их от
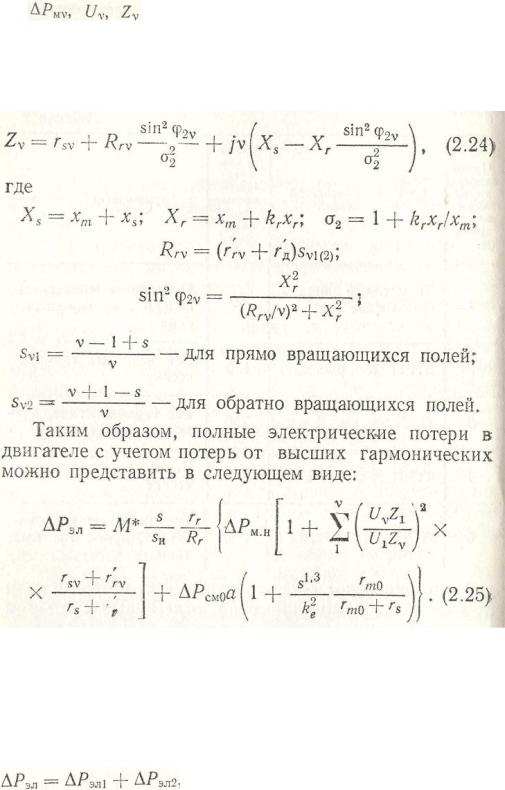
каждой гармонической составляющей. Так, потери в меди от высшей , v-й
гармонической, отнесенные к потерям от первой гармонической, с учетом вытеснения тока описываются следующим выражением:
(2.23)
239
|
|
|
|
240 |
где |
|
— соответственно |
потери, напряжение, |
сопротивление |
схемы |
замещения |
двигателя для v-й |
гармонической; rsv, rrV — |
сопротивление |
соответственно статора и ротора токам v-й гармонической с учетом вытеснения тока.
Эквивалентное сопротивление схемы замещения
Расчетные графики зависимости относительных электрических потерь от момента нагрузки в двигателе МТ11-6 при работе его с разными схемами ТРН изображены на рис. 15.
В несимметричных тиристорных электроприводах полные электрические потери равны сумме потерь от напряжений прямой и обратной последовательностей:
(2.26)
где 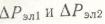 рассчитываются по формулам (2.25), в которые подставляются соответственно
рассчитываются по формулам (2.25), в которые подставляются соответственно  . Нужно учесть, что
. Нужно учесть, что  .
.
240