

УстрАСУ / Конспект УАСУ
.pdf191
Регулировочная характеристика генераторов параллельного возбуждения в рабочем диапазоне тока якоря 0 <= Iя < 1,25Iя, ном подобна кривой 1 по рис. 8.12. Характеристику КЗ можно снять лишь при питании обмотки возбуждения от постороннего источника.
Для генераторов последовательного возбуждения все основные характеристики, кроме внешней, можно получить только при питании обмотки возбуждения от независимого источника. Внешняя характеристика U=f (Iя) при Rв =
const; п = const определяется уравнением |
увеличении Iя |
На начальном участке характеристики напряжение |
По мере насыщения магнитопровода крутизна dU/dIя уменьшается и после прохождения наибольшего значения U снижается под влиянием Uя = Iя Rя и поперечной реакции якоря.
Генераторы смешанного возбуждения выполняются обычно с преобладающей МДС параллельной обмотки. Возможны согласное и встречное
включения катушек индуктора. При согласном включении последовательная обмотка используется для компенсации снижения напряжения под нагрузкой. Встречное включение применяется в специальных ГПТ, например сварочных.
ЛЕКЦИЯ 24. СХЕМЫ ВКЛЮЧЕНИЯ И ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Различают двигатели постоянного тока (ДПТ) с параллельным последовательным и смешанным возбуждением рис. (8.14), а также ДПТ с независимым возбуждением от электромагнитов или постоянных магнитов. Характеристики ДПТ в неявной форме описываются функцией
Конкретное описание статических характеристик получается из системы (8.1)—(8.3)
при t или d/dt=0.
Двигатели параллельного возбуждения:
191

192
а) Механическая характеристика п=f (Мэ) или электромеханическая характеристика п = f (Iя) при Iв = const; U = const Согласно (8.1) и (8.3) при uв= u=U
электромагнитный момент Мэ=cmФ Iя пропорционален току Iя, поскольку в случае
расположения щеток в нейтрали |
|
|
Он уравновешивается моментом |
|||
сопротивления: Мэ + М = 0. Полезный момент на валу М2= Мэ- М0= Мс. |
|
|||||
На основании (8.2) частота вращения: |
|
|
|
|
||
|
|
|
|
(8.12) |
|
|
В соответствии с (8.12) характеристика n=f (Iя) |
представляет собой прямую линию (рис. |
|||||
8.15). Пусковому |
режиму отвечают |
ток |
КЗ |
Iя ,п, |
и пусковой |
момент |
при n= 0). Ток Iя,п >> Iя, ном поскольку при неподвижном якоре |
с |
|||||
противо-ЭДС E = 0. Частота вращения идеального XX |
|
|
||||
М2=0 и Мэ = cmФ Iя |
частота вращения |
. |
мала. |
|
|
|
характеристики |
|
|
|
|
|
|
Если двигатель имеет |
поперечную |
реакцию |
якоря или его |
щетки |
||
сдвинуты с нейтрали, то |
|
|
|
|
|
|
|
|
|
|
|
(8.13) |
|
Уменьшение потока (— Ф) соответствует поперечной реакции якоря или продольной реакции при сдвиге щеток против направления n; приращение потока (+ Ф) соответствует сдвигу по направлению п. Приближенно можно принять Коммутационная реакция якоря заметно влияет лишь при ослабленных потоках Ф. В зависимости соотношения числителя знаменателя в (8.13) у рассматриваемой характеристики может меняться знак крутизны.
Из выражения (8.12) видны пути регулирования частоты вращения: варьирование U (при Iв = const), изменение Ф (при Iв = var) и включение в цепь якоря добавочного сопротивления (Rя,ц = Rя + Rд).. Обычно ДПТ допускают при Ф = var примерно трехкратное изменение n.
б) Рабочие характеристики
при Iв = const, U = const приведены на рис. 8.16. С увеличением полезной
мощности |
потребляемая от сети мощность P1, ток Iя, моменты Мэ, |
М2. Механические Pм |
и магнитиые Рc потери обусловливают момент |
=const , поскольку n в соответствии с механической характеристикой падает
незначительно. При повышенных |
я |
характеристик может |
|
|
192 |

193
нарушаться из-за уменьшения Ф от поперечной реакции якоря. Ход кривой обычный для электрических машин. Максимум КПД достигается при
г) Регулировочная характеристика Iв =f (Iя) или Iв = Iв (P2), при U = const, п = const (рис. 8.16). С увеличением P2, M2, Iя частота вращения падает ( Ф= 0). Для поддержания n=const необходимо соответствующее уменьшение Ф с помощью регулятора тока Iв при Rв = var за счет изменений сопротивления Rр (см. рис. 8.14, а). При Iя,п >> Iя, ном модуль крутизны характеристики может уменьшаться из-за ослабления Ф поперечной реакцией якоря. ДПТ с независимым возбуждением имеют такую же форму характеристик, как у ДПТ параллельного возбуждения, Двигатели последовательного возбуждения. Эти ДПТ применяются в установках с большим допустимым диапазоном изменения п при M2= var и с реверсированием. Они снабжаются иногда двумя обмотками индуктора: правого и левого направления вращения.
Достоинством двигателей служит большой пусковой момент Мэ. Эти машины широко используются на ЛА. Свойства ДПТ последовательного возбуждения наиболее ярко демонстрирует электромеханическая характеристика n =f (Iя) при U = const (рис. 8.17). Частота вращения
(8.14)
определяется потоком Ф = cфIя, а падение напряжения оказывает второстепенное влияние. Электромагнитный момент изменяется по параболе при Iя=var (рис. 8.17). Из (8.14) видно, что при малых токах Iя -> 0 имеется опасность «разноса» (п), поэтому недопустимы пуск в ход или работа вхолостую и с малыми нагрузками на валу. Для надежности вал двигателя жестко соединяется с приводным механизмом. В машинах малой мощности трение щеток обусловливает достаточно большие М0 и Iя0 чтобы избежать «разноса». При насыщении рост потока замедляется, что снижает модуль крутизны dn/d Iя и dМэ /Iя (пунктир на рис. 8.17). Регулирование частоты вращения согласно (8.14) возможно при U=var, Rя,ц=Rя + Rд=var, cф=var регулировочную характеристику двигателя можно получить только при независимом питании обмоток возбуждения. Особенности рабочих характеристик проявляются в
193

194
нелинейности зависимостей Мэ и n от P2 которые соответствуют кривым рис. 8.17.
Двигатели смешанного возбуждения. Обмотки индуктора (см. рис. 8.14, в)
имеют, как правило, согласное включение, поэтому
(8.15)
Встречное включение обусловливает знак минус перед cфIя в (8.15), возрастающую зависимость п =f (Iя) и неустойчивость работы ДПТ. При согласном
включении  регулирование n производится посредством Iв =
регулирование n производится посредством Iв =
var. Механические характеристики при  имеют такой же вид, как у ДПТ параллельного возбуждения. Легкая последовательная обмотка при согласном включении компенсирует уменьшение Ф от поперечной реакции якоря, что способствует устойчивости работы двигателя. Если требуются большой пусковой
имеют такой же вид, как у ДПТ параллельного возбуждения. Легкая последовательная обмотка при согласном включении компенсирует уменьшение Ф от поперечной реакции якоря, что способствует устойчивости работы двигателя. Если требуются большой пусковой
момент и быстрый разгон, то, машину выполняют с  и по своим свойствам она приближается к ДПТ последовательного возбуждения. Регулирование п осуществляется путем Iв = var (при Rр = var), а также включением Rд в цепь якоря или при шунтировании последовательной обмотки.
и по своим свойствам она приближается к ДПТ последовательного возбуждения. Регулирование п осуществляется путем Iв = var (при Rр = var), а также включением Rд в цепь якоря или при шунтировании последовательной обмотки.
8.6. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В МПТ
а) Включение нагрузки Rн, Lн ГПТ с независимым возбуждением. Полагаем iв = const, n = const и не учитываем влияние вихревых токов и изменение потока Ф. Для анализа процесса необходимо при этом только уравнение (8.2). Начальное условие iя (0)=0 соответствует режиму XX. Решение (8.2) имеет вид:
В общем случае |
Передаточная функция цепи якоря |
записывается на основании изображения (8.2) |
|
Если представить ГПТ как структурное последовательное соединение двух апериодических звеньев-цепей возбуждения и якоря, то без учета Еост его передаточная функция
б) Внезапное короткое замыкание ГПТ с параллельным возбуждением. Пусть до
начала процесса ГПТ работает вхолостую с ЭДС  При КЗ (8.1) и (8.2) превращаются в однородные уравнения Uв=U=0. Их совместное решение с учетом неравенства Rя<< Rв и начальных условий iв(0)= Iв0=E0/Rв и iя(0)=0 даёт зависимость
При КЗ (8.1) и (8.2) превращаются в однородные уравнения Uв=U=0. Их совместное решение с учетом неравенства Rя<< Rв и начальных условий iв(0)= Iв0=E0/Rв и iя(0)=0 даёт зависимость
194

195
(8.16)
где  — установившийся ток КЗ, постоянные времени
— установившийся ток КЗ, постоянные времени  и
и  Уравнение (8.16) получено в предположении Тя<< Тв. Анализ (8.16) показывает, что ток iя (t) вначале возрастает от 0 до
Уравнение (8.16) получено в предположении Тя<< Тв. Анализ (8.16) показывает, что ток iя (t) вначале возрастает от 0 до  , а затем уменьшается до значения Iя,к. Ударный ток Iятах>>Iя,ном может обусловить аварию генератора.
, а затем уменьшается до значения Iя,к. Ударный ток Iятах>>Iя,ном может обусловить аварию генератора.
в) Безреостатный пуск ДПТ параллельного возбуждения. Прямой пуск без ограничительных сопротивлений в цепи тока якоря применяется с целью быстрого разгона для ДПТ сравнительно небольшой мощности. Предполагается, что обмотка возбуждения заранее подключена к питающей сети и Ф = const. Сеть считается достаточно мощной (U = const). Насыщение магнитопровода и вихревые токи не учитываются. Пуск производится под нагрузкой при постоянном статическом моменте М = const. Электромеханический процесс разгона начинается после возрастания тока якоря от Iя = 0 (в момент включения) до мгновенного значения iя = Iя которое обеспечивает момент
трогания  . Электромагнитный процесс при n= 0 и и =U решению уравнения (8.2) с начальным условием развивается по обычному для цепи RL закону
. Электромагнитный процесс при n= 0 и и =U решению уравнения (8.2) с начальным условием развивается по обычному для цепи RL закону
(8.17)
где Iя,п=U/Rя — ток режима КЗ ДПТ, который установился бы при неподвижном роторе; Тя — постоянная времени.
При t=t0 по (8.17) ток  . Для электромеханического процесса принимается t0 = 0. При переходе к угловой скорости
. Для электромеханического процесса принимается t0 = 0. При переходе к угловой скорости  решение системы двух линейных дифференциальных уравнений (8.2), (8.3) первого порядка с начальными условиями
решение системы двух линейных дифференциальных уравнений (8.2), (8.3) первого порядка с начальными условиями
любым известным методом дает:
(8.18)
(8.19)
Корни характеристического уравнения имеют вид:
195

196
где Тэм -электромеханическая постоянная времени физический смысл Тэм можно пояснить, решая (8.3) относительно времени.
Время искусственного процесса разгона ротора вхолостую (при М = 0) с постоянным динамическим моментом Мдин=  от =0 до скорости =
от =0 до скорости = составляет:
составляет:
Таким образом, Тэм равно отношению наибольшего кинетического момента
(Мкин=J ) к максимальному электромагнитному моменту  . Для двигателей малой мощности Тэм =0,05-0.15 с.
. Для двигателей малой мощности Тэм =0,05-0.15 с.
Как следует из (8.18) и (8.19), переходные процессы зависят
от вида корней р1 и р2 который определяется знаком дискриминанта  . Апериодический процесс происходит, если D<=0 и p1, p2—действительные корни. Поскольку при этом p1,2 < 0, то экспоненты в (8.18) и (8.19) уменьшаются с ростом t. Ток якоря сначала возрастает от iя = Iя до некоторого максимума Iятах<<Iя,п а затем стремится к установившемуся значению Iя. Скорость ротора по мере разгона от = 0 повышается до
. Апериодический процесс происходит, если D<=0 и p1, p2—действительные корни. Поскольку при этом p1,2 < 0, то экспоненты в (8.18) и (8.19) уменьшаются с ростом t. Ток якоря сначала возрастает от iя = Iя до некоторого максимума Iятах<<Iя,п а затем стремится к установившемуся значению Iя. Скорость ротора по мере разгона от = 0 повышается до
скорости  , соответствующей моменту сопротивления Мc. Периодический (колебательный) процесс получается, если D > 0
, соответствующей моменту сопротивления Мc. Периодический (колебательный) процесс получается, если D > 0
(или Тэм < 4Тя) и p1, p2 — комплексно-сопряженные корни. Следовательно, амплитуда колебаний будет затухать с ростом t, ток iя Iя угловая скорость 0.
В частном случае при относительно больших параметрах J и Rя будет
 . Решение системы (8.2). (8.3) упрощайся, и в итоге получаются экспоненциальные процессы убывания тока (от Iя,п до Iя)
. Решение системы (8.2). (8.3) упрощайся, и в итоге получаются экспоненциальные процессы убывания тока (от Iя,п до Iя)
и нарастания скорости:
ЛКЦИЯ 25. ИСПОЛНИТЕЛЬНЫЕ ДПТ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
Достоинства ДПТ как исполнительных элементов автоматики определяются их хорошими регулировочными свойствами, высокой степенью использования активного объема, линейностью и однозначностью характеристик, отсутствием «самохода» (при снятии сигнала управления), быстродействием. Недостаток двигателей состоит в наличии подвижного щеточно-коллекторного контакта, обусловливающего ряд нежелательных коммутационных эффектов и усложняющего эксплуатацию. Все же коллекторные ДПТ имеют широкое применение, в том числе в бортовых системах и установках различного назначения. Получили распространение и бесконтактные ДПТ, свободные от указанного недостатка (см. § 8.9).
196
197
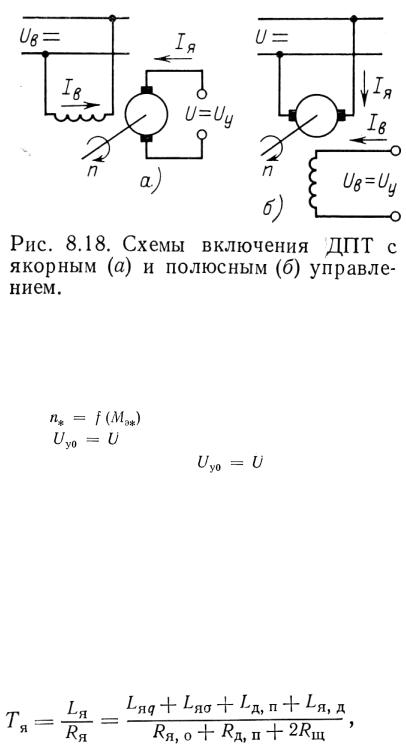
Управление исполнительными ДПТ, включаемыми по схеме независимого возбуждения (рис. 8.18), осуществляется по напряжению цепи якоря или цепи возбуждения с помощью полупроводниковых усилителей. Механические характеристики ДПТ с якорным управлением в относительных единицах n*=n/n0 как функция от Мэ*=Мэ/Мэ,п построены на рис. 8.19, а. Для ДПТ с полюсным управлением механические
характеристики |
. построены на рис 8.19, б. При якорном управлении |
|
базовый сигнал |
неизменному напряжению возбуждения, а при полюсном |
|
управлении (Uу = Uв) базовый сигнал |
равен постоянному напряжению якоря. |
|
Эти характеристики |
нетрудно получить, |
исходя из соотношения (8.12), если |
принять Поскольку магнитная система двигателей не насыщена (Сф = const), их характеристики линейны.
Поскольку магнитная система двигателей не насыщена (Сф = const), их характеристики линейны.
В большинстве случаев применяются ДПТ с якорным управлеием через щеточный контакт ток в них проходит только в режимах отработки рассогласования, что обусловливает лучшие эксплуатационные качества, чем в схеме с полюсным управлением. Полюсное управление используется для стабилизации частоты вращения исполнительных ДПТ и приводных ДПТ электромашинных преобразователей, а также при необходимости иметь «мягкие» (с большой отрицательной крутизной) механические характеристики электропривода. Исполнительные ДПТ как элементы автоматики характеризуют следующие динамические параметры.
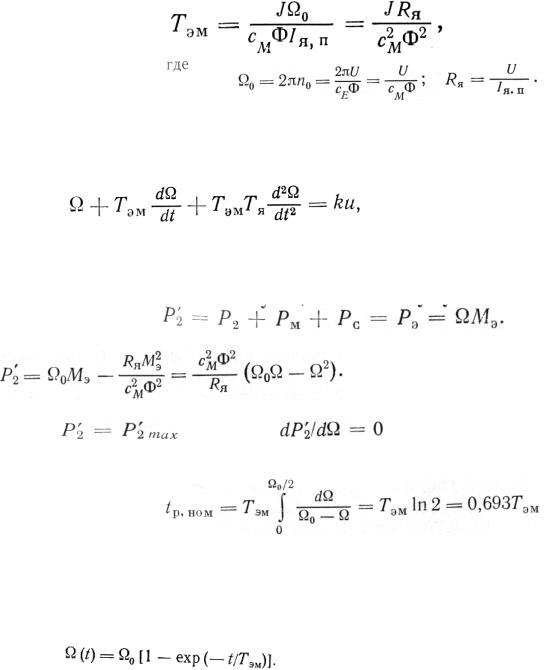
Электромагнитная постоянная времени
где Lяq и Lяо — индуктивности обмотки якоря, обусловленные поперечным потоком якоря и потоками рассеяния в пазах и вокруг лобовых частей обмотки; Lд,п и Lя,д — индуктивность обмотки дополнительных полюсов и ее взаимная индуктивность с обмоткой якоря; R...R—сопротивления обмоток якоря дополнительных полюсов и щеточного контакта.
Электромеханическая постоянная времени
197
198
Время разгона tp,ном от нуля до номинальной угловой скорости определяется на основании уравнения
получаемого из (8.2) и (8.3) если принять М= 0 и обозначить  . В качестве ном выбирается значение == о/2, соответствующее максимуму полной
. В качестве ном выбирается значение == о/2, соответствующее максимуму полной
механической мощности С учетом (8.12):
Для |
производная |
, откуда |
== о/2 |
Полагая Тм>> Тя ->0, из (8.21) находим время разгона до ном |
|
||
и зависимость угловой скорости от времени при разгоне:
Следовательно, при М = 0 и Тя =0 постоянная времени Тэм равнатакжеремени разгона вхолостую до скорости = 0,632 о Повышениебыстродействия ДПТ достигается при снижении Тя и Тэм. Изменение температуры по-разному влияет на Тя и Тэм Увеличение индукции в зазоре б ДПТ ведет к понижению Тэм - Для снижения Тя необходимо проектировать двигатели с малой шириной главных полюсов, т. е, при неизменном диаметре якоря увеличивать число 2р и сокращать полюсное перекрытие, а также выбирать больший зазор б. Существенное уменьшение Тя и Тэм достигается в малоинерционных ДПТ специальной конструкции: с печатными обмотками; с дисковым или полым цилиндрическим роторами; с гладкими (беззубцовыми) роторами.
Передаточные функции ДПТ записываются на основании (8.21). Входным параметром служит напряжение и = и (t), а выходным — угловая скорсть (t) = d /dt или угол поворота вала = (t)
198

199
(8.23)
(8.24)
Если М = М ( ) <> 0, то для М = km передаточная функция
где
Рассмотрим импульсное управление ДПТ, простейшая схема которого представлена на рис. 8.20, а. В цепь якоря последовательно включен транзистор Г, работающий в режиме переключения: он полностью открывается при подаче от широтноимпульсного преобразователя ШИП импульсов напряжения определеннойамплитуды с регулируемой длительностью t1 и с последующей паузой t2 Полное время цикла Tц = t1 + t2- Если t1 *= t1/ Tц=1, двигатель работает в стационарном режиме с наибольшей скоростью. Если t2 *= t2/ Tц=1> двигатель отключен (закрыт Т) и =0. При 0 < t1 *<1 предварительно разогнанный двигатель меняет среднюю за цикл скорость в пределах
<=. cp<= max Если t1 *=const, двигатель работает в квазистациопарном режиме с
=cp. Несмотря на импульсный характер работы источника, ток через обмотку якоря, протекает практически непрерывно. Это обусловлено включением диода Д (рис. 8.20, а), через который замыкается ток, поддерживаемый за счет уменьшения запаса электромагнитной энергии в индуктив ности Lя. Восполнение убыли энергии в обмотке якоря происходит во время импульса. Энергетически импульсный режим выгоден: среднее значение Icp потребляемого от источника импульсного тока существенно
меньше, чем среднее значение Iя,cp тока якоря (РИС. 8.20, б). Во время импульса токи равны (iи = iя). В режиме переключения электрические потери ШИП и нагрев транзистора
Т минимальны. Время выбирается на порядок меньше Тя. При этом частота импульсов должна быть повышенной (200-2000 Гц). Эта частота получается заведомо больше частоты возмущающих воздействий в автоматической системе. Для уменьшения допустимой частоты последовательно с якорем можно включить добавочную индуктивность — дроссель.
199

200
Механические характеристики ДПТ с управлением по схеме рис. 8.20, а при достаточно высокой частоте (fи ) определяются следующими соотношениями. Для времени dt длительности импульса справедливо получающееся из второго закона Кирхгофа уравнение:
(8.24)
где diя— приращение тока якоря за время (dt — напряжение U источника питания; RT — сопротивление цепи эмиттер-коллектор транзистора.
Для продолжительности паузы (t2 */ t1 *) ток якоря уменьшается на diя, чему соответствует уравнение баланса энергии
(8.25)
где R— сопротивление диода Д в проводящем направлении.
На основании (8.24) и (8.25) с учетом соотношений t2 *+ t1 * =1 и  получаем:
получаем:
(8.26)
200