

10.7.1. Независимое регулирование активной и реактивной мощностей синхронных машин продольно-поперечного возбуждения
На рис. 7.1, а показана векторная диаграмма синхронного генератора классического исполнения (с одной обмоткой возбуждения). У этого генератора приращение ЭДС-якоря ∆Ead, обусловленное регулированием тока возбуждения (Ifd = Ifd0 + ∆Ifd0), всегда направлено вдоль оси вектора Ё0d, т.е. вдоль поперечной оси ротора и вызывает отклонение как активной ∆Р, так и реактивной ∆Q мощности машины.
Совершенно иная картина имеет место в машинах продольно-поперечного возбуждения. Изменяя соотношение токов в обмотках возбуждения, можно сделать так, что приращение ЭДС якоря ∆E0 будет направлено под произвольным и заданным углом к ЭДС Ёо (рис. 7.1, б).
Так можно добиться такого положения, что приращение ЭДС якоря будет направлено всегда перпендикулярно вектору напряжения якоря U. В этом случае будет изменяться или регулироваться только активная мощность машины (рис. 7.2, а).
ЭМ.СM. 10.6. 14.01.2007. 23.03.2008.
Если же приращение ЭДС направлено вдоль вектора напряжения якоря, то изменяется или регулируется только реактивная мощность машины (рис. 7.2, б). Следовательно, в машинах, содержащих две обмотки возбуждения, за счет изменения пространственного положения вектора МДС возбуждения электрическим путем, т. е. посредством изменения соотношений токов возбуждения, можно добиться независимого регулирования активной и реактивной мощностей.
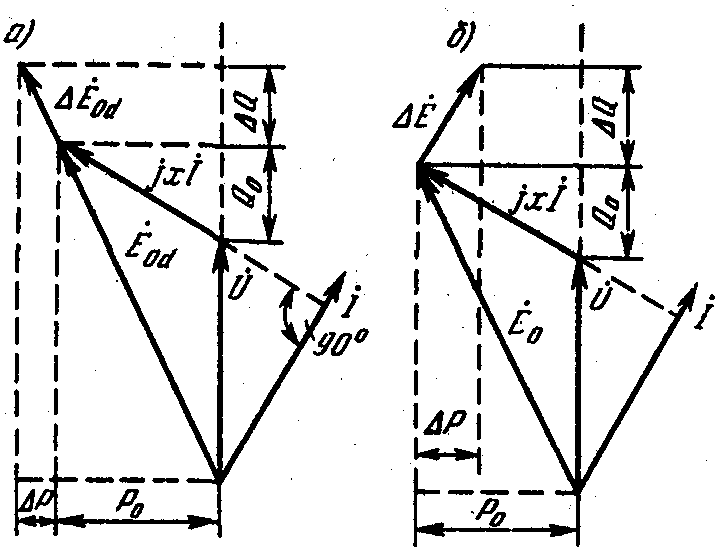

Рис. 7.1. Приращение ЭДС, вызванное регулированием возбуждения:
а — в синхронной машине классического исполнения;б ~ в машине продольно-поперечного возбуждения
Благодаря этой возможности машина получает ряд важных преимуществ перед обычной синхронной машиной.
Обозначим через E0u и Eov проекции вектора Ёо на синхронные координатные оси и, v, вращающиеся вместе с вектором напряжения якоря (рис. 7.3), где δ угол между U и осью d или между U = Eaq.
Из векторной диаграммы рис. 7.3 получим:
E0u = E0 * COS θ = Eod * COS δ – Eoq * SIN δ (7.1)
E0v = E0 * SIN θ = Eod * SIN δ – Eoq * COS δ
Соответственно
Eod = Xa * Ifd = Eou * COS δ – Eov * SIN δ (7.2)
Eoq = Xa * Ifq = Eou * SIN δ – Eov * COS δ

Рис. 7.2. Регулирование активной (а) и реактивной (б) мощности в машине продольно-поперечного возбуждения
ЭМ.СM. 10.7. 12.01.2001. 14.01.2007.
Эти и все последующие соотношения записаны для неявнополюсной машины, а явнополюсная машина заменена эквивалентной неявнополюсной. Из (7.3) видно, что, изменяя (регулируя) Eov, можно изменять активную мощность, а изменяя ЁОи — реактивную.
О тклонения
этих ЭДС связаны с отклонениями токов
возбуждения
тклонения
этих ЭДС связаны с отклонениями токов
возбуждения
соотношениями, следующими из формул (7.2):
На основании этих соотношений формируется система автоматического регулирования возбуждения машины, обеспечивается независимое регулирование активной и реактивной мощностей (рис. 7.4)
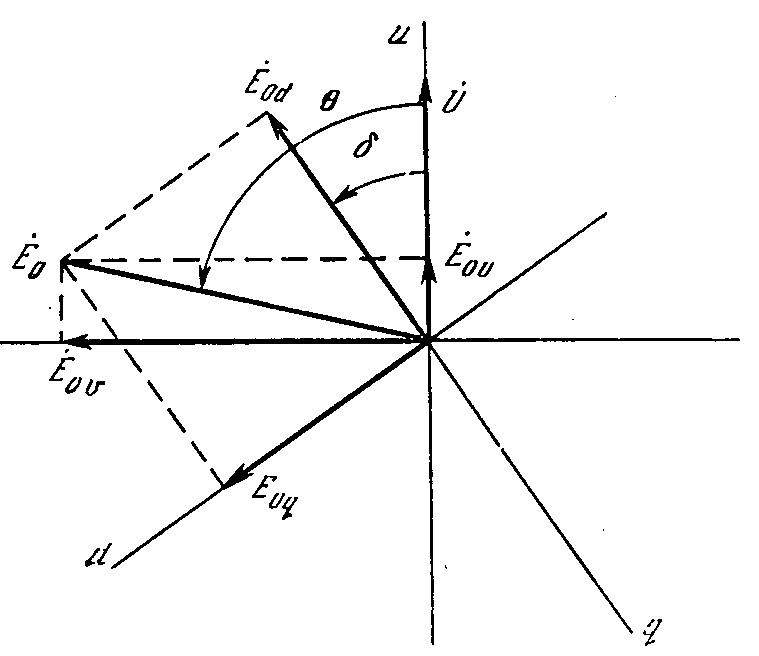
Рис. 7.3. Взаимосвязь между составляющими вектора ЭДС EouиEоvс составляющимиEoq ИEod
Изменяя Руст или QycT в соответствии с соотношением (7.4), осуществляют регулирование активной или реактивной мощности.
При Р=Руст = const и переменном значении момента (активной мощности) на валу изменяется угловая скорость вращения ротора:
ω = 1/ Tj * ∫ {MB — M)dt.
При этом машина тормозится или ускоряется (в зависимости от разности Ма—М). Однако в сеть будет выдаваться (в режиме генератора) или из сети будет потребляться (в режиме двигателя) постоянное значение активной мощности, что обеспечивает демпфирование колебаний активной мощности (частоты) в энергосистеме. Подобный двигатель, приводящий во вращение механизм с ударной нагрузкой, обеспечит сглаживание (демпфирование) колебаний активной мощности, забираемой двигателем из электрической сети. Благодаря этому в энергосистему не поступают вообще или поступают в значительно ослабленном виде толчки, что благоприятно влияет на
ЭМ.СM. 10.8. 12.01.2001. 14.01.2007.
устойчивость и качество работы других устройств, подключенных к этой энергосистеме
Синхронный компенсатор подобного типа, подключенный к зажимам некоего потребителя, создающего импульсы активной и реактивной мощности (дуговые печи и др.), способен, таким образом, обеспечить демпфирование колебаний как частоты, вызванных колебаниями активной мощности, так и напряжения, обусловленных колебаниями реактивной мощности. Для решения этих задач одновременно необходимо поддерживать неизменными уставки Руст И QycT.
Так как угловая скорость вращения ротора ω и угловая скорость магнитного поля якоря ω1 в такой машине оказываются «развязанными», то появляется принципиальная возможность поддержания постоянства частоты напряжения якоря независимо от частоты вращения ротора, т. е. создания генератора стабильной частоты при переменной частоте вращения вала.
В двигателе подобного типа появляется принципиальная возможность при постоянной частоте сети осуществить регулирование частоты вращения ротора.
Принцип независимого регулирования активной и реактивной мощностей положен в основу формирования законов регулирования возбуждения машины.