

Тема 3. Синхронные машины.
Л Е К Ц И Я 10. (06.08.09).
Специальные синхронные машины.
10.1 Синхронные магнитоэлектрические двигатели.
Синхронные магнитоэлектрические двигатели это синхронные машины с постоянными магнитами.
Синхронные машины с постоянными магнитами не имеют обмотки возбуждения на роторе, а поток в них создается с помощью постоянного магнита, расположенного на роторе. Статор этих машин не отличается от обычного.
Применяются эти машины в основном в качестве двигателя небольшой мощности.
Эти двигатели могут иметь радиальное, аксиальное и тангенциальное расположение магнитов.
Физические процессы, протекающие в этих машинах при асинхронном пуске имеют некоторую особенность, обусловленную тем, что эти двигатели при пуске имеют поле ротора, наводящую в статора ЭДС, частота которой пропорциональна частоте вращения ротора.
Эта ЭДС наводит в статоре ток, взаимодействующий с полем постоянных магнитов и создающий тормозной момент.
Таким образом, при разгоне двигателя с постоянными магнитами на его ротор действуют два момента: вращающий Mv и тормозной Мt от тока, наведенного в обмотке статора полем постоянного магнита.
Зависимость этих моментов от частоты вращения ротора различна.
Максимум вращающего момента критическому скольжению асинхронного двигателя, малому скольжению.
Максимум тормозного момента соответствует большому скольжению. Рис.10.1.
Разгон осуществляется под действием дух этих моментов.
Форма кривой момента таких двигателей зависит от критического скольжения и от степени возбужденности двигателя, характеризующегося величиной Кeu
Keu = Eo / U
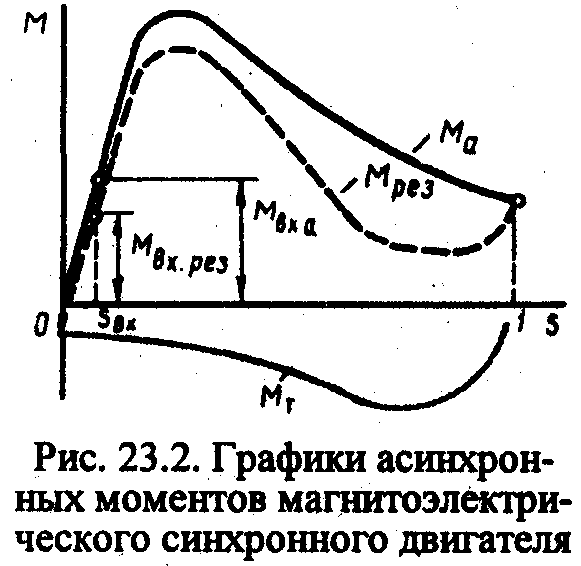
С увеличением Keu провал в характеристике увеличивается.
Рис. СМ.10.1. Моментные характеристики СД с постоянными магнитами.
ЭМ.СM. 10.2. 12.01.2001. 26.03.2005.
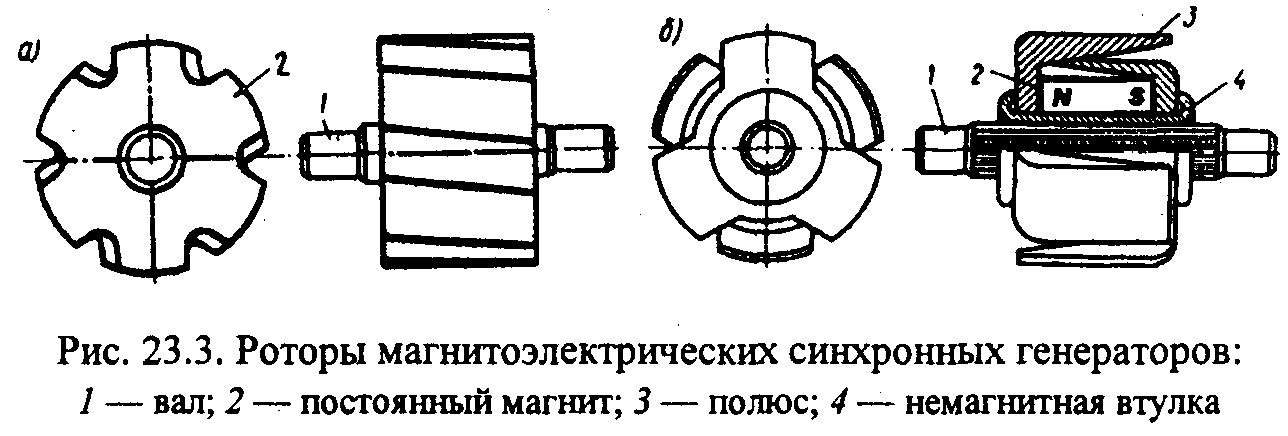
10.2. Синхронные магнитоэлектрические двигатели с когтеобразными полюсами.
Синхронные двигатели малой мощности часто выпускаются с когтеобразными полюсами и цилиндрическим постоянным магнитом (рис. 23.3,б). Ротор с когтеобразными полюсами дает возможность получить генератор с рассеянием полюсов, ограничивающим ударный ток при внезапном коротком замыкании генератора. Этот ток представляет большую опасность для постоянного магнита ввиду сильного размагничивающего действия.
Помимо недостатков, отмеченных при рассмотрении магнитоэлектрических синхронных двигателей, генераторы с постоянными магнитами имеют еще один недостаток, обусловленный отсутствием обмотки возбуждения, а поэтому регулировка напряжения в магнитоэлектрических генераторах практически невозможна. Это затрудняет стабилизацию напряжения генератора при изменениях нагрузки.
10.3. Сг с когтеобразными полюсами и электромагнитным возбуждением.
Вместо магнита на роторе установлена катушка возбуждения.
Когтеобразный ротор позволяет иметь многополюсную машину с одной катушкой возбуждения. Используется как автомобильный генератор.
10.4. Синхронные реактивные двигатели.
СГ спроектированный для работы без обмотки возбуждения и постоянных магнитов, называется РЕАКТИВНЫМ СГ.
Синхронные реактивные двигатели имеют только реактивную составляющую момента.
Мр = m * p * U2 / 2 / w1 * SIN 2 *( 1/Xq - 1/ Xd)
Эти машины имеют специальную конструкцию ротора, имеющую большое отношение Хd/Xqдоходящее до 5-6. Это позволяет повысить момент, развиваемый этими двигателями.
ЭМ.СM. 10.3. 12.01.2001. 26.03.2005.
Рассмотрим величину мощности реактивного СГ в относительных единицах.
P* = P/S = P / (m Uн Iн) = U2 / 2 * (1/Xq* - 1/Xd*) * SIN(2*)
Положим, что U*=1, Xd* =1.6, Xq*=0.35. Тогда Pm* = 1.12.
Учитывая, что перегрузочная способность двигателя должна составлять Км=1, т.е. величина полезной мощности может составлять около половины.
Машина в этом режиме потребляет реактивный ток. На холостом ходу этот ток равен:
I = U / Xd
Например, при U*=1, Xd* =1,6 получим I* = 0,631 от номинального.
Векторная диаграмма такой машины приведена на рис. 22.