

4 Структурно-параметрический синтез зу объектом на основе идеологии эталонных математических моделей сау
Цель данного раздела - с помощью методов, ориентированных на использование линейных эталонных ММ, синтезировать законы управления, обеспечивающие автоматической системе заданные показатели качества и дать сравнительную оценку результатов.
Задачи раздела:
1) с использованием метода типовых переходных процессов (ПП) синтезировать эталонные ММ в виде желаемых дифференциальных уравнений и желаемых передаточных функций;
2) с использованием аппарата алгебраического преобразования операторных выражений синтезировать ПФ последовательного управляющего устройства;
3) с использованием метода отождествления высших производных синтезировать ЗУ исследуемым объектом;
4) дать сравнительную оценку качества синтезированных САУ, сложности и реализуемости формирующих их ЗУ.
![]()
4.1 Критериальная стратегия синтеза зу по эталонным мм
Ужесточим требования к системе, тогда критериальная стратегия синтеза имеет следующий вид:
время регулирования
 с;
с;трубка регулирования 2 %;
перерегулирование ф = 10 %;
порядок системы n = 3.
4.2 Синтез эталонной математической модели сау
Для синтеза эталонной ММ необходимо выбрать тип переходного процесса. В практике автоматического управления получили распространение следующие типы переходных процессов:
Апериодический ПП при максимальной степени устойчивости (МСУ-тип);
Колебательный ПП с критическим затуханием (КЗ-тип);
Колебательный ПП с минимальным временем регулирования (МВР-тип);
Колебательный ПП, соответствующий так называемому “идеальному фильтру” (ИФ-тип).
Примем решение синтезировать систему в соответствие с ПП ИФ-типа.
4.2.1 Синтез зу по эталонной пф сау и пф объекта управления
Порядок
характеристического полинома определяется
по формуле
![]() ,
гдеb
– степень знаменателя передаточной
функции рассматриваемого канала;
,
гдеb
– степень знаменателя передаточной
функции рассматриваемого канала;
a – степень числителя передаточной функции рассматриваемого канала.
Таким образом, n = 5 – 2 = 3.
Тогда ХП имеет вид p3+2p2+2p+1.
Для
заданной трубки регулирования (2 %) и
найденного порядка системы, нормированное
время затухания переходного процесса
![]() определяется по графикам переходных
процессов ИФ-типа. График переходных
процессов ИФ-типа изображён на рисунке
4.1:
определяется по графикам переходных
процессов ИФ-типа. График переходных
процессов ИФ-типа изображён на рисунке
4.1:
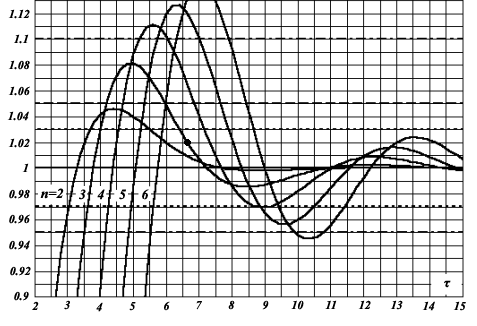
Рисунок 4.1 – График переходных процессов ИФ-типа с отмеченной точкой входа процесса с порядком 3 в 2% трубку регулирования
В
данном случае получаем, что нормированное
время затухания переходного процесса
![]() .
.
По
заданному в числе критериев качества
проектируемой САУ желаемому времени
регулирования
![]() и найденному
и найденному![]() вычисляется коэффициент нормирования
полученного полинома по времени:
вычисляется коэффициент нормирования
полученного полинома по времени:
![]()
![]()
Значения
![]() коэффициентов нормированного полинома
пересчитываются по формуле
коэффициентов нормированного полинома
пересчитываются по формуле![]() в значения коэффициентов
в значения коэффициентов![]() характеристического полинома ММ
проектируемой системы в реальном
масштабе времени. Соответствующие
преобразования дают следующие значения:
характеристического полинома ММ
проектируемой системы в реальном
масштабе времени. Соответствующие
преобразования дают следующие значения:

В результате ХП системы в реальном масштабе времени примет вид:
![]()
Полная передаточная функция эталонной системы будет равна:
![]()
Требуется промоделировать полученную систему в пакете Classic. В результате получается переходный процесс, который отображён на рисунке 4.2 (файл 4-1.MDL прилагается).

Рисунок 4.2 - Кривая ПП эталонной ПФ замкнутой системы
Согласно показателям ПП, полученным в пакете Classic:
время регулирования: 1.985 с
перерегулирование: 8.14%
Переходной процесс (его качества) отвечает требуемой КСС.