

3. Параметрический синтез типового закона управления объектом на основе методологии расширенного d-разбиения
Основная задача данного раздела - синтез системы автоматического управления с заданными показателями качества на основе типового регулятора с использованием частотного аппарата параметрического синтеза, базирующегося на преобразовании допустимой области корневой плоскости в область выбора допустимых значений настроечных параметров закона управления.
Исходные данные
В качестве объекта управления системы автоматического управления возьмем канал u1-y1.
Исходная передаточная функция ОУ, представленная в канонической последовательно-структурированной форме, имеет вид:
![]()
Параметры передаточной функции ОУ:
коэффициент передачи К = 22.4718;
порядок астатизма = -1;
полином числителя М(р) =
 .
.полином знаменателя
N(р)=![]() .
.
Технологические требования, предъявляемые к синтезируемой системе:
время регулирования tр не более 15 с;
условная степень устойчивости = 2,5;
степень затухания колебаний не менее 0,75.
3.2 Построение параметрических областей заданного качества в среде MathCAD с использованием САПР-файла «MPS-PID»
Все расчёты проводятся с помощью программного модуля Synt PID-ZU-astat.mcd, который представляет собой MathCAD-файл (результаты расчетов представлены в файле Synt PID-ZU-astat.mcd).
На основе параметров передаточной функции ОУ построим логарифмическую амплитудно-частотную характеристику (ЛАЧХ) статической части объекта управления (рисунок 3.1).

Рисунок 3.1 – ЛАЧХ статической части объекта управления
Построение графика ЛАЧХ необходимо для уточнения параметров расчёта частотного диапазона варьирования частоты при параметрическом синтезе.
Для изменения управляющего воздействия подаваемого на объект управления воспользуемся ПИД-регулятором.
Такой регулятор является астатическим и имеет три параметра настройки: коэффициент усиления kp, время дифференцирования Tд и время интегрирования (или изодрома) Tи. Передаточная функция ПИД-регулятора обычно имеет вид:
![]() .
.
При
использовании метода МП-разбиения
удобней, осуществив переобозначения
![]() ;
;
![]() и
и
![]() ,
получить другое представление передаточной
функции (*)
,
получить другое представление передаточной
функции (*)
![]() ,
которое используется в дальнейших
расчётах. Здесь постоянные коэффициенты
Сi
(i
= 0, 1, 2) рассматриваются как псевдонастроечные
параметры регулятора и легко пересчитываются
в действительные настройки
,
которое используется в дальнейших
расчётах. Здесь постоянные коэффициенты
Сi
(i
= 0, 1, 2) рассматриваются как псевдонастроечные
параметры регулятора и легко пересчитываются
в действительные настройки
Варьируя параметром настройки дифференциальной составляющей ПИД-закона регулирования с2, строятся области модально-параметрического разбиения для настроек с0 и с1.
Прежде чем находить ПИД-закон регулирования, попытаемся найти области МП-разбиения для более простого ПИ-закона регулирования. Однако использование ПИ-регулятора приводит к необходимости ослабления ограничения на быстродействие. На рисунке 21 представлен вариант расположения фигуративных линий параметрического разбиения плоскости с1-с0 параметров ПИ-закона управления для tр = 100 c и = 0,15, т.е. до коррекции каких-либо параметров.
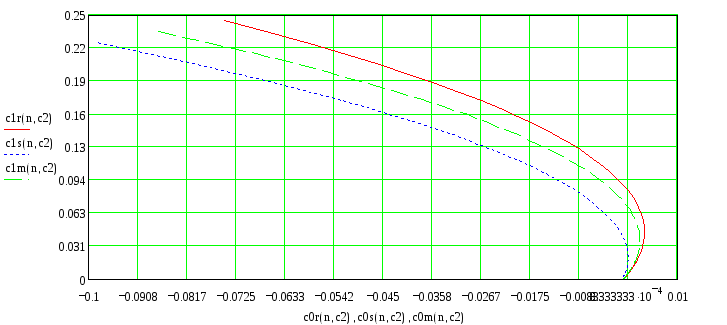
Рисунок 3.2 – Вариант начального расположения фигуративных линий параметрического разбиения плоскости с1-с0 параметров ПИ-закона управления
Здесь кривая 1 (красный цвет линии) представляет собой параметрическую кривую D-разбиения, отделяющую зону устойчивости; кривая 2 (синий цвет линии) – это параметрическая кривая настройки регулятора для заданной интенсивности затухания (граница степени устойчивости = 2,5); кривая 3 (зелёный цвет линии) – это параметрическая кривая настройки регулятора на заданную колебательность (степень затухания колебаний = 0,75).

Рисунок 3.3 - Вариант расположения критических линий параметрического разбиения плоскости c1-c0 параметров ПИ-закона управления
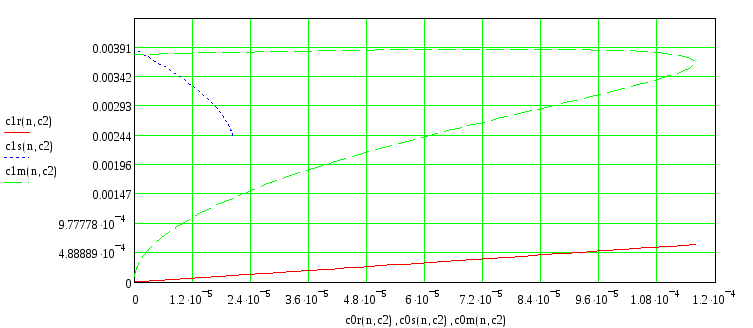
Рисунок 3.4 - Вариант коррекции расположения критических линий параметрического разбиения плоскости c1-c0 параметров ПИ-закона управления при tр = 50 c, = 0,999
Методом варьирования значения tр, которое представляет собой значение времени регулирования при законе регулирования с меньшими возможностями, получаем tр =50. Найденные значения tр = 50 с и = 0,999 представляют собой критические значения времени регулирования и степени затухания колебаний, то есть это предельное минимальное время регулирования и максимальную степень затухания колебаний при законе регулирования с меньшими возможностями. Данное значение tр не удовлетворяет значению быстродействия, заданному в требованиях к системе. Значение примем равным 0,95. Оптимизируем значение tр за счёт применения ПИД-закона регулирования.
Уменьшим значение tр в 2 раза, tр = 25 с. Такое уменьшение является оптимальным, т.к. большее уменьшение времени невозможно реализовать в действительности. Теперь найдем оптимальное значение с2. Для этого меняем значение этого параметра с 0 на некоторую величину. Начнем с с2 = 0.1. График расположения критических линий параметрического разбиения плоскости c1-c0 в этом случае представлен на рисунке 3.5.

Рисунок 3.5 - Вариант коррекции расположения фигуративных линий параметрического разбиения плоскости c1-c0 параметров ПИД-закона управления с с2 = 0.1.
Попробуем увеличить с2 до 0.15. График расположения критических линий параметрического разбиения плоскости c1-c0 в этом случае представлен на рисунке 3.6. А затем попробуем уменьшить с2 до 0.08. График расположения критических линий параметрического разбиения плоскости c1-c0 в этом случае представлен на рисунке 3.7.
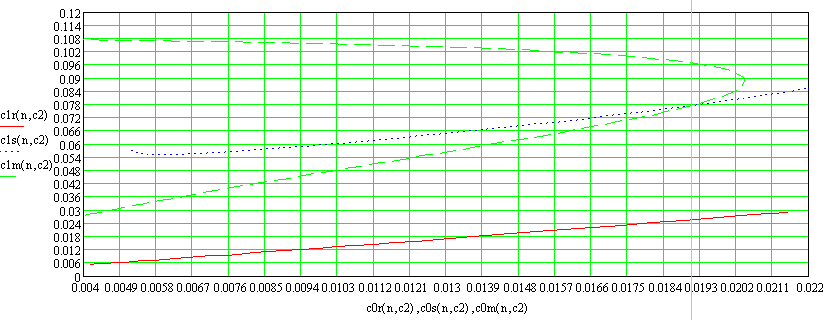
Рисунок 3.6 - Вариант коррекции расположения фигуративных линий параметрического разбиения плоскости c1-c0 параметров ПИД-закона управления с с2 = 0.15.
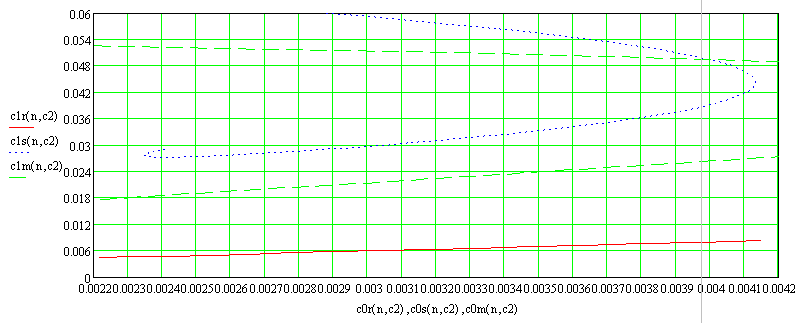
Рисунок 3.7 - Вариант коррекции расположения фигуративных линий параметрического разбиения плоскости c1-c0 параметров ПИД-закона управления с с2 = 0.08.
3.3. Выбор настроечных параметров
Варьируя параметром настройки дифференциальной составляющей ПИД-закона регулирования с2, строим области поиска модально-параметрического разбиения для настроек с0 и с1.
Выбирая на плоскости “c0-c1” точки, принадлежащие всем построенным параметрическим областям допустимых значений, получаем параметры настройки ПИД-регулятора в виде троек c0, c1, c2 .
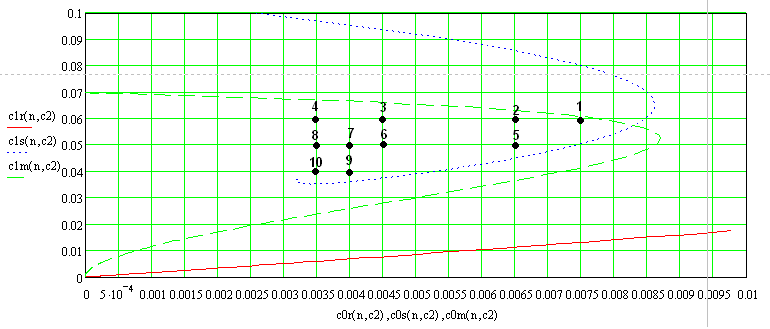
Рисунок 3.8 - Вариант расположения фигуративных линий параметрического разбиения плоскости с1-с0 параметров ПИД – закона управления при с2=0,1
Таблица 3.1 – Показатели перерегулирования и времени регулирования при с2=0,1
|
№ п/п |
с0 |
с1 |
с2 |
Перерегулирование ф, % |
Время регулирования tр, c |
|
1 |
0,0075 |
0,06 |
0,1 |
41.67 |
14.7287 |
|
2 |
0,0065 |
0,06 |
0,1 |
39.61 |
13.8990 |
|
3 |
0,0045 |
0,06 |
0,1 |
35.47 |
9.2066 |
|
4 |
0,0035 |
0,06 |
0,1 |
33.4 |
9.0945 |
|
5 |
0,0065 |
0,05 |
0,1 |
36.48 |
15.4823 |
|
6 |
0,0045 |
0,05 |
0,1 |
31.59 |
10.5806 |
|
7 |
0,0040 |
0,05 |
0,1 |
30.36 |
10.5668 |
|
8 |
0,0035 |
0,05 |
0,1 |
29.11 |
10.4766 |
|
9 |
0,0040 |
0,04 |
0,1 |
26.36 |
12.9359 |
|
10 |
0,0035 |
0,04 |
0,1 |
24.97 |
12.9638 |
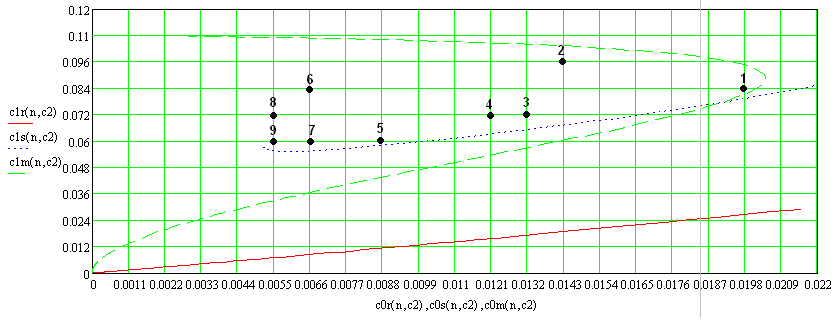
Рисунок 3.9 - Вариант расположения фигуративных линий параметрического разбиения плоскости с1-с0 параметров ПИД – закона управления при с2=0,15
Таблица 3.2 – Показатели перерегулирования и времени регулирования при с2=0,15
|
№ п/п |
с0 |
с1 |
с2 |
Перерегулирование ф, % |
Время регулирования tр, c |
|
1 |
0,0198 |
0,084 |
0,15 |
46.22 |
13.3880 |
|
2 |
0,0143 |
0,096 |
0,15 |
43.65 |
11.0365 |
|
3 |
0,0132 |
0,072 |
0,15 |
36.48 |
13.1105 |
|
4 |
0,0121 |
0,072 |
0,15 |
35.24 |
8.5138 |
|
5 |
0,0088 |
0,06 |
0,15 |
27.79 |
10.1176 |
Продолжение таблицы 3.2
|
6 |
0,0066 |
0,084 |
0,15 |
32.83 |
7.3322 |
|
7 |
0,0066 |
0,06 |
0,15 |
24.91 |
10.0850 |
|
8 |
0,0055 |
0,072 |
0,15 |
27.76 |
8.1433 |
|
9 |
0,0055 |
0,06 |
0,15 |
23.46 |
9.8097 |
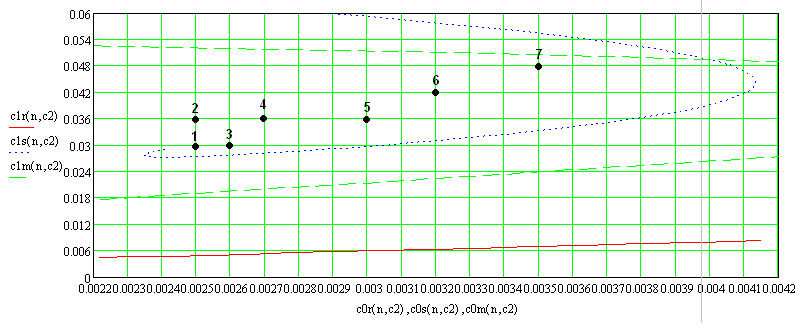
Рисунок 3.10 - Вариант расположения фигуративных линий параметрического разбиения плоскости с1-с0 параметров ПИД – закона управления при с2=0,08
Таблица 3.3 – Показатели перерегулирования и времени регулирования при с2=0,08
|
№ п/п |
с0 |
с1 |
с2 |
Перерегулирование ф, % |
Время регулирования tр, c |
|
1 |
0,0025 |
0,03 |
0,08 |
24.46 |
16.0351 |
|
2 |
0,0025 |
0,036 |
0,08 |
26.95 |
13.3638 |
|
3 |
0,0026 |
0,03 |
0,08 |
25 |
16.0194 |
|
4 |
0,0027 |
0,036 |
0,08 |
27.79 |
13.3999 |
|
5 |
0,003 |
0,036 |
0,08 |
29.03 |
13.3591 |
|
6 |
0,0032 |
0,042 |
0,08 |
32.28 |
11.7824 |
|
7 |
0,0035 |
0,048 |
0,08 |
35.81 |
10.6647 |
Сравним точки с наилучшими показателями перерегулирования, выбирая по одной лучшей из каждой таблицы.
Таблица 3.4 – Сравнительная таблица
|
№ п/п |
с0 |
с1 |
с2 |
Перерегулирование ф, % |
Время регулирования tр, c |
|
1 |
0,0035 |
0,04 |
0,1 |
24.97 |
12.9638 |
|
2 |
0,0055 |
0,06 |
0,15 |
23.46 |
9.8097 |
|
3 |
0,0025 |
0,03 |
0,08 |
24.46 |
16.0351 |
Можно сделать вывод о том, что точка под номером 2 из таблицы 3.4 с учётом критериальной стратегии обладает лучшими показателями качества по сравнению с другими выбранными точками.
Данная точка имеет координаты с0 = 0,0055, с1 = 0,06, с2 =0,15. Соответственно действительные настройки имеют вид: Tи=181,82, Tд=0,15, kp=0,06.
ПИД-регулятор подключается к объекту управления согласно типовой схеме регулирования по отклонению, представленной на рисунке 3.11
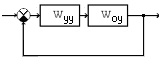
Рисунок 3.11 – Типовая схема регулирования по отклонению
Передаточная функция ПИД – регулятора, полученная путём подстановки значений в формулу (*):
![]()
Переходный процесс в синтезированной системе показан на рисунке 3.12.
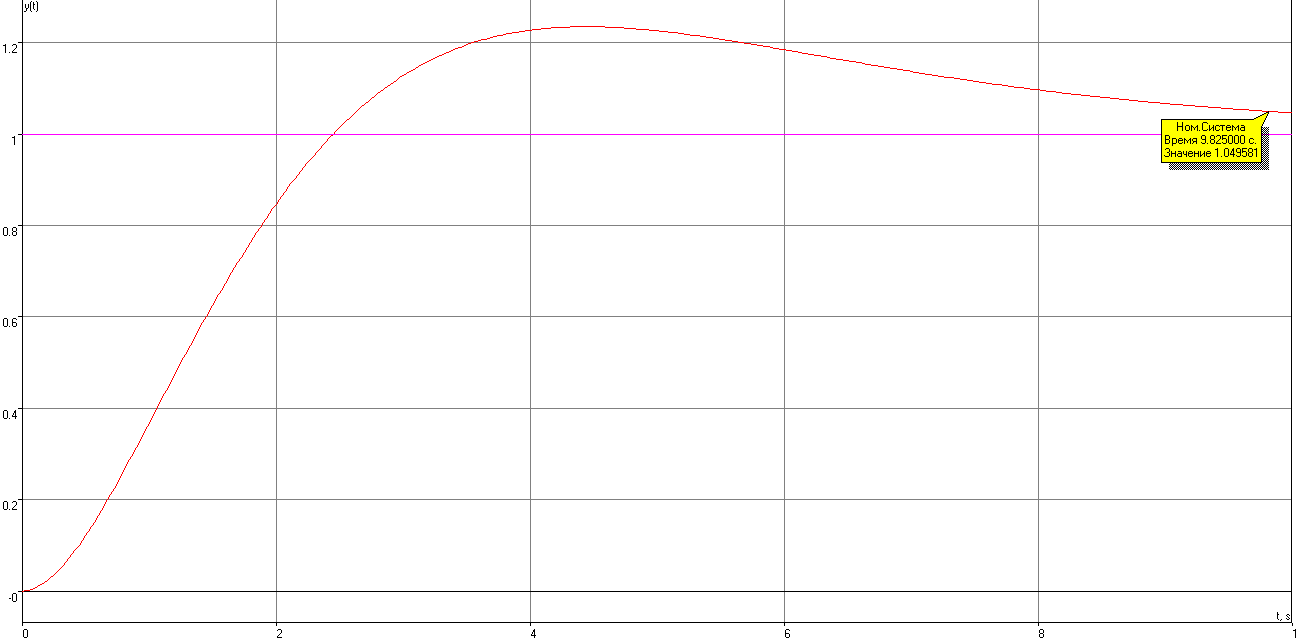
Рисунок 3.12 – Переходный процесс в синтезированной системе
Показатели качества синтезированной САУ имеют значения:
время регулирования, исходя из 5 %-трубки регулирования, tр = 9.8097 с;
перерегулирование ф = 23.46 %.
Таким образом, в результате синтеза ПИД – закона управления были получены такие настроечные параметры регулятора, при которых переходный процесс в САУ обладает показателями качества не хуже заданных.