

4.2.2 Синтез пф уу
Синтез требуемого закона управления преобразованием операторных математических моделей объекта и замкнутой системы, если задана структура включения устройства управления (УУ), относительно несложен в силу алгебраического характера этих преобразований.
Из полученной ПФ замкнутой системы можно выразить ПФ устройства управления (регулятора), схема включения которого приведена на рисунке 4.3.
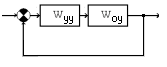
Рисунок 4.3 - Схема включения УУ
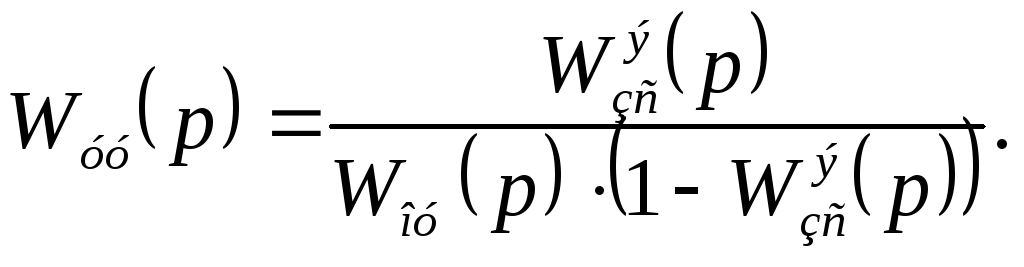
В этом случае формула передаточной функции УУ задаётся формулой:
|
|
|
В результате получим (файл 4.2.2.xmcd прилагается):

![]()
Таким образом, регулятор представляет собой физически реализуемое звено пятого порядка с астатизмом первого порядка.
Для оценки качества спроектированной системы управления исследуем её в пакете Classic (файл 4-2.MDL прилагается). Системы первого порядка астатизма отрабатывают с нулевой ошибкой ступенчатые входные воздействия и с постоянной ошибкой – линейные. Поэтому для того, чтобы судить о качестве системы, достаточно проанализировать ступенчатое воздействие.
График переходного процесса для синтезированной системы представлен на рисунке 4.4.
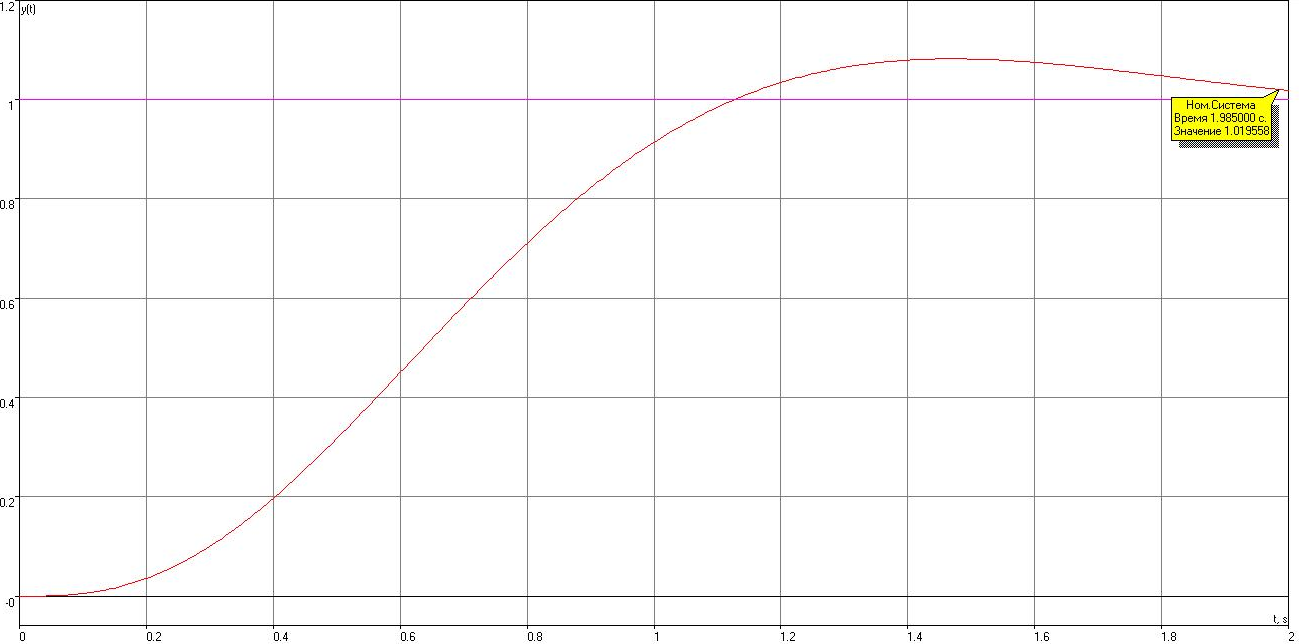
Рисунок 4.4 - Переходный процесс в синтезированной системе
Синтезированная система имеет следующие показатели качества:
время регулирования: 1.7850 с
перерегулирование: 8.15 %
Синтезированная система управления имеет показатели качества, удовлетворяющие установленным технологическим требованиям.
Вывод: данный переходный процесс частично соответствует (время регулирования отличается) полученному выше графику требуемого переходного процесса. В целом, спроектированная система удовлетворяет заданным показателям качества и позволяет качественно управлять объектом при ступенчатом воздействии. Использованный метод синтеза приводит к получению трудно реализуемого управляющего устройства высокого порядка (в нашем случае пятого).
4.3 Синтез зу по эталонному ду сау и ду объекта управления методом отождествления высших производных
Наряду с операторными, в инженерной практике используются методы синтеза ЗУ, ориентированные на дифференциальную форму описания. Распространение получил подход, который по сути используемой процедуры можно назвать методом отождествления высших производных (ОВП). Он позволяет проектировать как линейные, так и нелинейные ЗУ, прост в использовании, и его можно эффективно применять в задачах синтеза на инженерном уровне. В данном подразделе необходимо синтезировать ЗУ с помощью этого метода.
С учётом последовательного улучшения качества синтезируемого ЗУ используем полученные в п. 4.2 показатели качества как допустимые для данного метода. Сначала необходимо выбрать желаемый тип переходного процесса. Так как ранее был использован ИФ-тип, то и в данной части применим именно этот тип переходного процесса.
Порядок
характеристического полинома равен
порядку ХП в исходном УОУ. Следовательно
![]() .
Тогда нормированный ХП запишется
следующим образом
.
Тогда нормированный ХП запишется
следующим образом
![]() .
.
Для
заданной трубки регулирования (2 %) и
найденного порядка системы, нормированное
время затухания переходного процесса
![]() определяется по графикам переходных
процессов ИФ-типа (рисунок 4.1). В данном
случае получаем, что нормированное
время затухания переходного процесса
определяется по графикам переходных
процессов ИФ-типа (рисунок 4.1). В данном
случае получаем, что нормированное
время затухания переходного процесса
![]() .
.
По
заданному в числе критериев качества
проектируемой САУ желаемому времени
регулирования
![]() и найденному
и найденному![]() вычисляется коэффициент нормирования
полученного полинома по времени:
вычисляется коэффициент нормирования
полученного полинома по времени:
![]()
![]()
Значения
![]() коэффициентов нормированного полинома
пересчитываются по формуле
коэффициентов нормированного полинома
пересчитываются по формуле![]() в значения коэффициентов
в значения коэффициентов![]() характеристического полинома ММ
проектируемой системы в реальном
масштабе времени. Соответствующие
преобразования дают следующие значения:
характеристического полинома ММ
проектируемой системы в реальном
масштабе времени. Соответствующие
преобразования дают следующие значения:

В результате ХП системы в реальном масштабе времени примет вид:
![]()
ПФ синтезируемой системы будет иметь вид:
![]() Теперь
получим ПФ синтезируемой системы в
приведённой форме:
Теперь
получим ПФ синтезируемой системы в
приведённой форме:
![]() Представим
ММ объекта управления в приведённой
форме дифференциального уравнения (для
этого воспользуемся ПФ объекта,
представленной в нормальной форме):
Представим
ММ объекта управления в приведённой
форме дифференциального уравнения (для
этого воспользуемся ПФ объекта,
представленной в нормальной форме):
![]()
![]()
Представим ММ объекта и системы «вход - выходными» ДУ такого вида, при котором оно разрешается относительно высшей производной.
 Далее отождествляя (приравнивая) высшие
производные в уравнениях объекта
управления и системы получаем:
Далее отождествляя (приравнивая) высшие
производные в уравнениях объекта
управления и системы получаем:
![]()
 Выразим
сигнал u(p),
обозначив
через
Выразим
сигнал u(p),
обозначив
через
![]() - ошибка регулирования (рассогласование):
- ошибка регулирования (рассогласование):
![]()
Иначе полученный закон управления можно записать в следующем виде:
![]() .
.
Д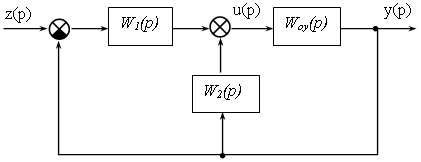 ля
реализации полученного закона управления
составляется схема формирования ММ САУ
(рисунок 4.5).
ля
реализации полученного закона управления
составляется схема формирования ММ САУ
(рисунок 4.5).
Рисунок 4.5 - Структурная схема синтезированной САУ
Для данной синтезированной системы в пакете Classic был построен переходный процесс, по которому были оценены показатели качества системы. Переходный процесс представлен на рисунке 4.6 (файл 4-3.MDL).
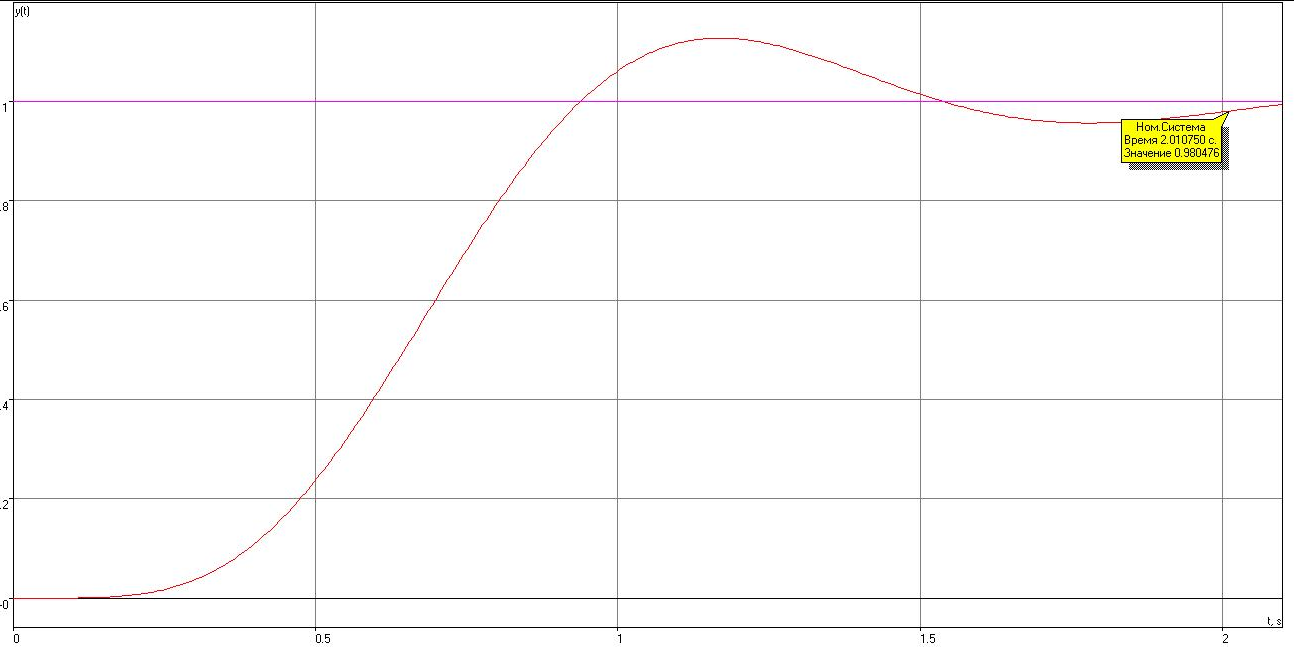
Рисунок 4.6 - Переходный процесс в синтезированной системе
Синтезированная система имеет следующие показатели качества:
время регулирования: 2.01075 с
перерегулирование: 12.65 %
Таким образом, синтезированная система управления имеет показатели качества, удовлетворяющие установленным технологическим требованиям, позволяет качественно управлять объектом при ступенчатом воздействии. Однако полученный регулятор физически не реализуем, т.к. содержит передаточную функцию, у которой степень числителя больше степени знаменателя.