

1.4 Индивидуально заданная структурная схема
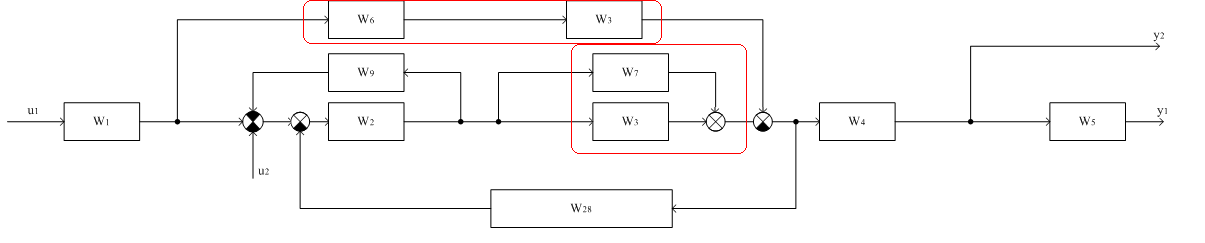
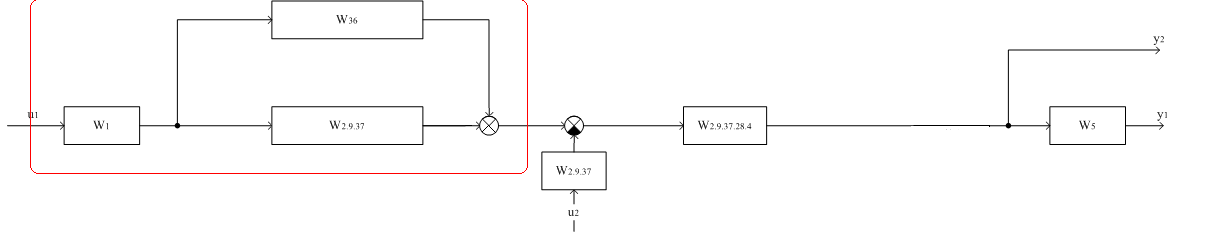
Полученная структурная схема УОУ вместе с найденными ПФ составляющих её звеньев представлена на рисунке 2.
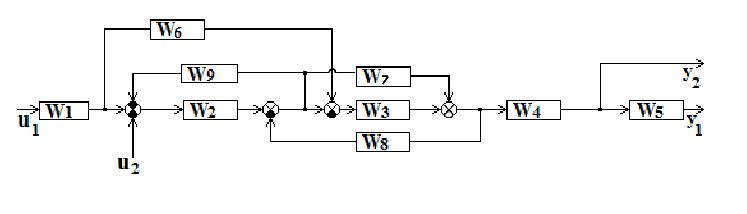
Рисунок 1.2 – Индивидуально заданная структурная схема
2 Построение и исследование «вход – выходных» математических моделей условного объекта управления
Исходными данными для этого этапа является результат построения в первой части работы.
Структурная схема УОУ, изображенная на рисунке 2, является 4-хканальной. Она имеет два входа (u1, u2) и два выхода (y1, y2). Систему можно описать двумя операторными уравнениями:
(2.1)![]()
![]()
Свойства системы можно описать матрицей ПФ размерностью 22, каждый элемент которой W(p)ij (i, j=1..2) представляет собой динамические характеристики канала ui–yj:
(2.2)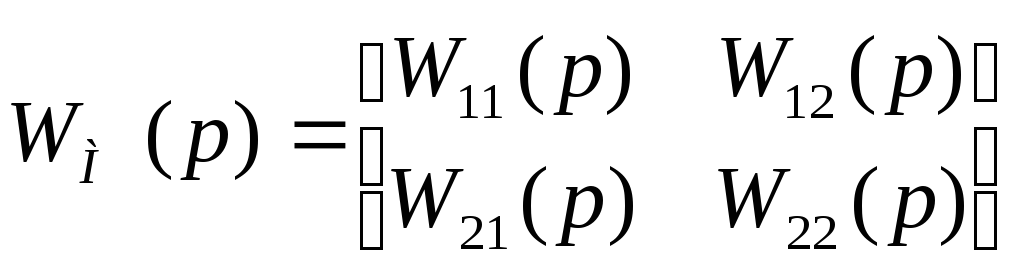
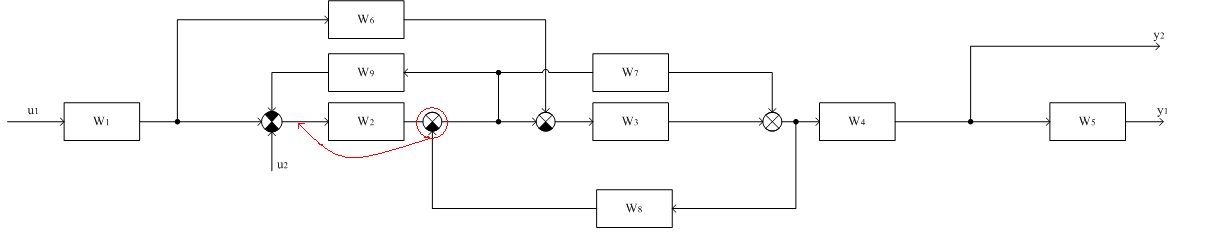
Рассмотрим данную схему отдельно по каналам и найдем канальные ПФ с помощью ручных преобразований.
2.1 Получение пф уоу по каналам внешних воздействий
2.1.1 Канал u1- y1
Этап 1:
Рисунок
2.1 - Перенос сумматора через звено ![]() назад
назад
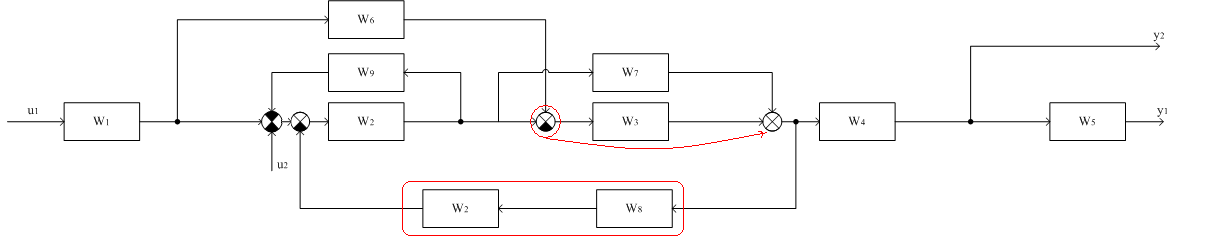
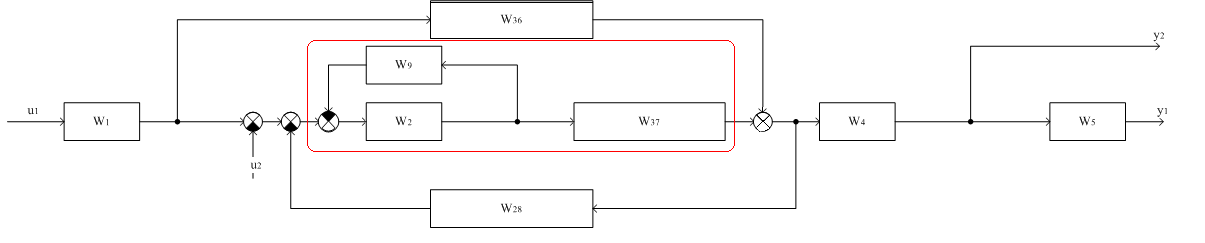
Этап 2:
Рисунок
2.2 - Перенос сумматора через звено
![]() и через сумматор вперед, объединяем
и через сумматор вперед, объединяем![]() и
и![]() :
:![]()
Этап 3:
Рисунок
2.3 – Объединение звеньев
![]() и
и![]() :
:![]() ;
;
![]() и
и
![]() :
:![]()
Этап 4:

Рисунок 2.4 – Разбили сумматоры и перенесли сумматор вперед
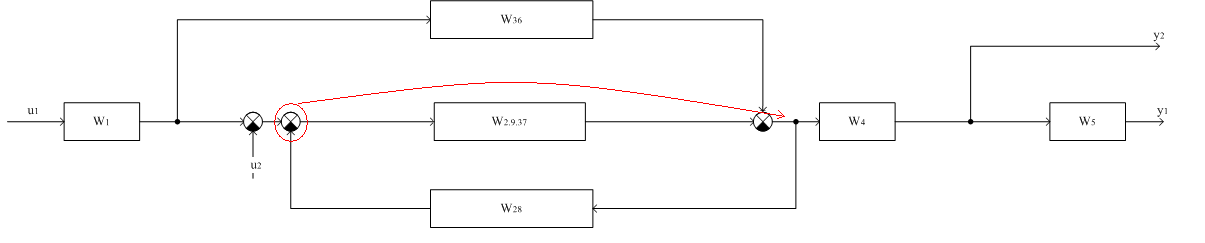
Этап 5:
Рисунок
2.5 – Объединение звеньев
![]() ,
,
![]() ,
,
![]() :
:![]()
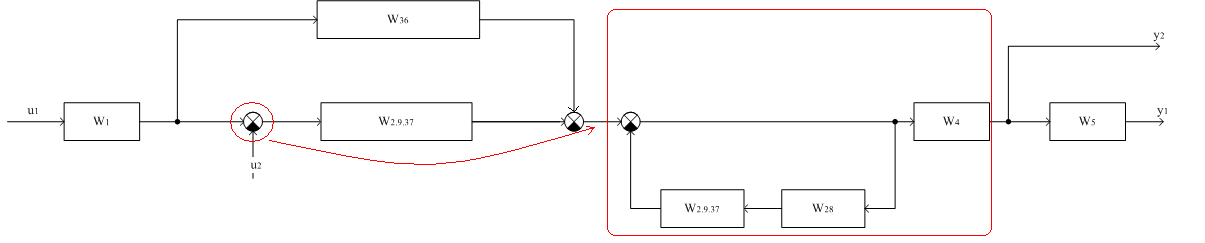
Этап 6:
Рисунок
2.6 – Переносим сумматор через звено
![]() и через сумматор вперед
и через сумматор вперед
Этап 7:
Рисунок
2.7 – Переносим сумматор через звено
![]() и через сумматор вперед.
и через сумматор вперед.
Объединяем
![]() ,
,![]() ,
,![]() :
:
![]()
Этап 8:
Рисунок
2.8 – Объединяем
![]() ,
,![]() ,
,![]() :
:
![]()
Этап 9:

Рисунок 2.9 – Конечная схема
В итоге получаем следующие схемы для четырех каналов (рисунки 2.10, 2.11, 2.12, 2.13).
![]()
Рисунок 2.10 – Канал U1-Y1
![]()

Рисунок 2.11 – Канал U1-Y2
![]()

Рисунок 2.12 – Канал U2-Y1
![]()

Рисунок 2.13 – Канал U2-Y2
![]()
ПФ, найденные вручную, принимают следующий вид (файл part2.mcd прилагается):
![]()
![]()
![]()
![]()
Проверим результаты ручных вычислений с показаниями пакета Classic (файл 2.MDL прилагается). На рисунке 2.14 представлена схема, построенная в программе, а на рисунке 2.15 представлены результаты работы программы для каналов.
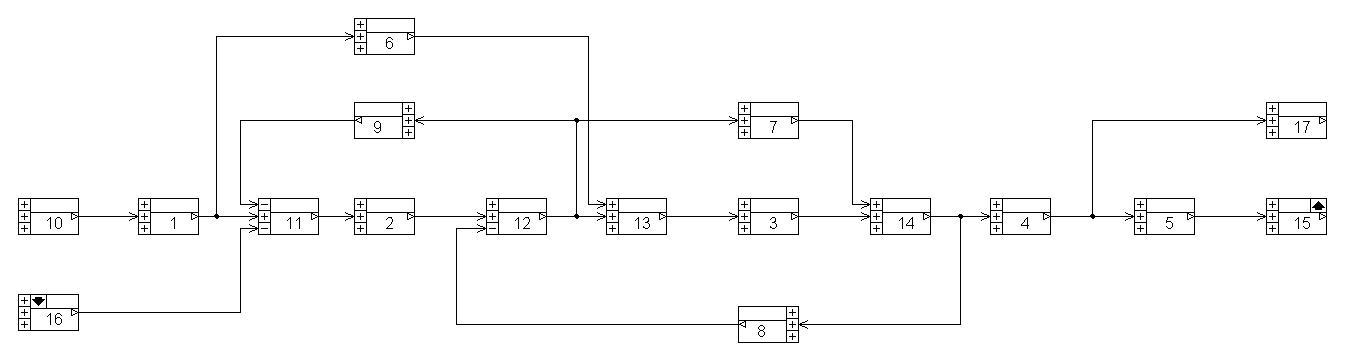
Рисунок 2.14 - Схема УОУ, построенная в пакете Classic
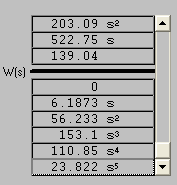
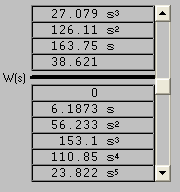
Канал u1-y1 Канал u1-y2
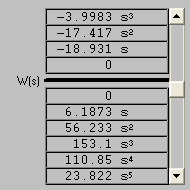
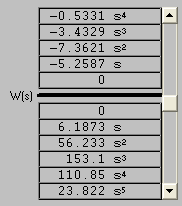
Канал u2-y1 Канал u2-y2
Рисунок 2.15 - Результаты работы программы Classic для каналов
Результаты вычислений передаточных функций вручную и при помощи программы Classic по всем каналам совпадают, что говорит о том, что преобразование схемы выполнено верно.
2.2 Преобразование передаточных функций УОУ
Преобразуем полученные выше ПФ УОУ по каналам к основным стандартным формам представления.
Одной
из наиболее распространенных форм
представления ПФ сложного динамического
звена (ДЗ) является нормальная форма
![]() ,
где полиномВн(р)
имеет
единичный коэффициент при старшей
степени
р
знаменателя.
,
где полиномВн(р)
имеет
единичный коэффициент при старшей
степени
р
знаменателя.
Приведём канальные передаточные функции к нормальной форме (округление до шестого знака после запятой):
![]()
![]()
![]()
![]()
Также
широко используется представление ПФ
в канонической форме![]() ,
где полиномы Aк(р)
и Вк(р)
имеют единичные свободные члены.
,
где полиномы Aк(р)
и Вк(р)
имеют единичные свободные члены.
![]()
![]()
![]()
![]()
2.3 Исследование условного объекта управления
По канонической форме ПФ объекта проведем анализ его свойств по каналам как динамического звена автоматики. При этом оцениваются такие его свойства, как порядок, статизм или астатизм.
Астатизм звена и порядок астатизма определяется показателем степени p канонической формы ПФ. Показатель >0 говорит, что звено является астатическим с порядком астатизма . Показатель =0 указывает, что звено апериодическое.
канал u1-y1: v=1;
канал u1-y2: v=1;
канал u2-y1: v=0;
канал u2-y2: v=0.
2. Порядок системы определяется порядком полинома знаменателя: n = 5.
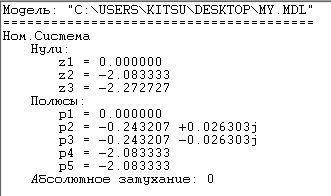
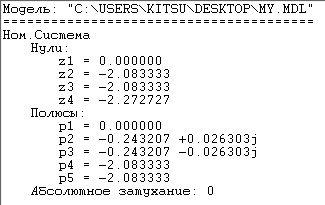
Для
того, чтобы продолжить исследование
свойств ОУ как динамического звена
(оценить его быстродействие, колебательность,
форсирующие свойства), представим
передаточные функции УОУ в виде
произведения ПФ элементарных типовых
звеньев
![]() ,где
nзв
- количество выделенных звеньев. Для
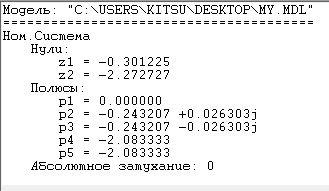
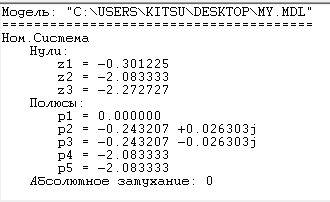
этого с помощью пакета Classic найдем корни
полиномов числителя (нули zi)
и знаменателя (полюсы pi)
канальных ПФ и представим их в виде
элементарных полиномов по формуле
,где
nзв
- количество выделенных звеньев. Для
этого с помощью пакета Classic найдем корни
полиномов числителя (нули zi)
и знаменателя (полюсы pi)
канальных ПФ и представим их в виде
элементарных полиномов по формуле
![]() ,
где для действительных корней
,
где для действительных корней![]() полинома
полинома![]() ,
а
,
а![]() – их количество,
– их количество,![]() ,
,![]() ,
,![]() – действительная и мнимая части j-ой
пары комплексно-сопряжённых корней
полинома Q,
– действительная и мнимая части j-ой
пары комплексно-сопряжённых корней
полинома Q,![]() – количество таких пар.
– количество таких пар.
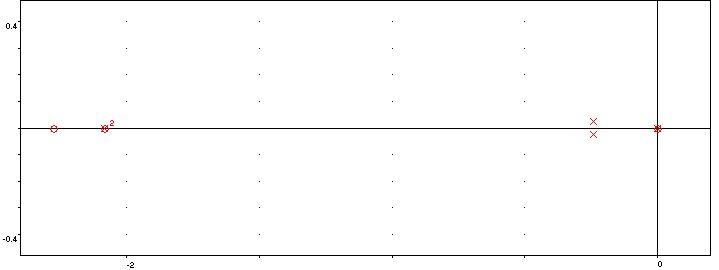
Таблица 2.1 – Нули и полюса получившейся системы
|
|
|

Продолжение таблицы 2.1
|
|
|
|
|
|
|
|
|


Представив полученные корни в виде произведений элементарных полиномов и подставив полученные полиномы в ПФ в канонической форме, получим передаточные функции УОУ в виде произведения ПФ элементарных типовых звеньев:
![]()
![]()
![]()
![]()
По полученным передаточным функциям оценим свойства УОУ как динамического звена:
Быстродействие (время переходного процесса) определяется по наибольшей постоянной времени
 ,
где
Tмах
– наибольшее значение постоянной
времени.
,
где
Tмах
– наибольшее значение постоянной
времени.
Tмах=4.0878
с,
таким образом
![]() .
.
Время переходного процесса по показаниям пакета Classic:
канал u1 – y1: 12.75 с;
канал u1 – y2: 14.25 с;
канал u2 – y1: 19.42 с;
канал u2 – y2: 18.82 с.
Колебательность определяется по наименьшим значениям показателей
 .
Так как есть пара комплексно-сопряжённых
полюсов, то колебательность присутствует
во всех каналах.
.
Так как есть пара комплексно-сопряжённых
полюсов, то колебательность присутствует
во всех каналах.Форсирующие свойства определяются отношением максимальных постоянных времени числителя и знаменателя, т.е.
 .
Форсирующие свойства присутствуют,
если это отношение больше 1.
.
Форсирующие свойства присутствуют,
если это отношение больше 1.
Таблица 2.1
|
Канал u1–y1 |
|
|
Канал u1–y2 |
|
|
Канал u2–y1 |
|
|
Канал u2–y2 |
|
Анализируя результаты расчётов, можно сделать вывод о том, что каналы u1–y1 и u2–y1 не обладают, а каналы u1–y2 и u2–y2 обладают форсирующими свойствами.