

2.3. Технології створення моделей просторових об’єктів
Створення моделей просторових об’єктів передбачає введення просторової і семантичної кадастрової інформації, а створення об’єктно-орієнтованих моделей передбачає пов’язування просторової і атрибутивної баз даних і опис поведінки реальних об’єктів.
Просторова частина кадастрових даних створюється або уручну, або за допомогою дигітайзера.
Введення інформації вручну передбачає запис координат земельної ділянки і спеціально створеній формі (рис. 7.1).

Цифрові об’єкти кадастрових карт створюються шляхом цифрування карт на твердих носіях. Існує дві технології цифрування вихідних даних: сканування картографічних матеріалів з наступною векторизацією та дигіталізація.
Дигіталізація – процес перетворення просторових даних з аналогової в цифрову форму у вигляді послідовності точок, положення яких описується прямокутними декартовими координатами площини цифрувача, за допомогою курсору з клавіатурою і хрестовидним курсором у різних режимах: з поточковим вводом або потоковим вводом, коли генерується потік координатних пар через рівні проміжки часу чи інтервали простору. Виконується за допомогою дигітайзера.
Сканування та подальша векторизація - сканери перетворюють картографічний, наприклад, паперовий оригінал в растрову модель з високою точністю і роздільною здатністю, який потім, у разі якщо в якості моделі подання вибрана векторна модель, векторизується. Векторизація буває трьох видів: ручна, автоматична, напівавтоматична (інтерактивна).
ручна векторизація - виконується оператором за допомогою екранного курсору (який управляється звичайно “мишею”) по “підкладці”, виведеній на екран монітора;
автоматична векторизація - припускає майже повну відсутність втручання оператора в роботу системи і застосовується при великій кількості нескладних документів (можлива пакетна обробка), для карт з наявністю переважно лінійних елементів та гарною якістю оригіналу;
напівавтоматична (інтерактивна) векторизація – об’єднує підходи ручної і автоматичної векторизації. Векторизація здійснюється по растровій “підкладці” і ставить у відповідність до кожного растрового графічного елемента його векторний аналог.
Якщо у якості вихідних матеріалів використовуються такі цифрові дані, як дані ДЗЗ, то етап сканування пропускається.
Після виконання розглянутих операцій отримується векторна модель “спагетті”. Для можливості використання цих даних для складання цифрових кадастрових карт і планів необхідно перетворити їх в топологічну модель. Найбільш поширена і економічно ефективна – інтерактивна векторизація.
Загальна технологія інтерактивної векторизації наведена на рис.1. і має такі основні кроки:
Попередня обробка растру:
реєстрація растру у реальних координатах;
проведення розкладу кольорів растру на різні тематичні шари;
формування бінарного (чорно-білого) зображення з багатобарвного растру шляхом виділення порогів;
фільтрація - видалення випадкових шумів, зазвичай у формі зернистостей;
приведення до однорідності (згладжування, спрощення);
зтоншення - зтоншення ліній так, щоб вони, по можливості, дорівнювали одному пікселю по ширині;
перетворення зтоншеного растрового зображення в набір ланцюжків пікселів, де кожний представляє дугу;
видалення місць де об’єкти торкаються один-одного.
Налагодження процесу векторизації:
встановити ширину лінії у пікселях;
встановити відстань між сегментами лінії які трасирувальник може "перестрибнути";
встановити розмір отворів у лінії які ігноруються;
встановити кут можливого відхилення трасирувальника в бік від траекторії векторизації;
встановити можливу відстань між вершинами;
встановити контроль за товщиною растрової лінії;
встановити реакцію трасирувальника у випадку невизначеної ситуації.
Процес векторизації:
вказання місця початку векторизації;
контроль за процесом векторизації;
додавання атрибутивних даних;
верифікація отриманих результатів.
Генералізація отриманих векториних даних:
зпрощення;
розрідження;
згладження.
Занесення в базу просторових даних.

Рис. 1. Технологія векторизації
Способи введення графічної інформації.
Існує декілька способів введення інформації в ГИС з використанням традиційних карт і планів. Це цифрование з використанням дигитайзера і цифрование растрового зображення на екрані комп'ютера (векторизація). Дігиталізация має два різновиди: по крапках і потоком, а векторизация- три: ручна, інтерактивна і автоматична.
Поточкова дигитализация.
При дигитализации зображення по точках цифруется окремо кожна точка плану, що цікавить, з подальшим з'єднанням відповідних крапок на отриманому комп'ютерному зображенні . Такий спосіб підходить для дигитализации знімального обгрунтовування, опорних пунктів, окремо об'єктів, що стоять. Характеризується невеликою продуктивністю праці і більшою трудомісткістю, ніж при інших способах оцифровки.
Потокова дигитализация.
При потоковій дигитализации цифруется вся інформація, що цікавить, з розмежуванням векторних типів. Існує три типи векторних даних:: крапка, лінія і полігон. Точкові об'єкти, тобто об'єкти, що не мають протяжних меж, або такі розміри, які не відображаються на карті площадковими умовними знаками, що мають, цифруются об'єктами типу крапка (Н: стовпи, окремо дерева, що стоять, каміння і т.д.) . Лінійні об'єкти, що мають постійну ширину і що характеризуються своєю протяжністю (або завдовжки) цифруются об'єктом типу лінія (Н: дорогі, лінії ЛЕП і зв'язки, канали і т.д).
Площадкові об'єкти цифруются об'єктами типу полігон (Н: земельна, водна ділянка).
Цифрованіє проводиться різними способами залежно від типу контура. Точки цифруются аналогічно поточечному способу. Лінії цифруются від початкової крапки до кінцевої. Полігони цифруются звичайно з самої верхньої крапки шляхом обходу за годинниковою стрілкою.
Даний спосіб більш продуктивний, хоча вимагає від фахівця більшої уважності.
Векторизація.
При ручному способі векторизації по растру оператор обводить точки растру векторними об'єктами за допомогою маніпулятора (миші) з автоматичною прив'язкою до сусідніх крапок. Ручний спосіб відрізняється меншою точністю, в порівнянні з дигитализацией і інтерактивним способом векторизації, характеризується меншою продуктивністю праці і вимагає великих зусиль від оператора
При інтерактивному способі у оператора з'являється можливість прив'язуватися до точок растру, сусіднім межам об'єктам в інтерактивному режимі. Інтерактивний режим має на увазі собою автоматичне проложение або продовження ліній у відповідність з існуючими межами. Це більш зручний і точний спосіб векторизації, проте він накладає більш високі вимоги до якості растру.
При автоматичній векторизації векторні об'єкти створюються без участі оператора відповідно до растрових контурів і алгоритму векторизації. Підходить для поліпшення якості растру, дешифрування ситуації, векторизації растру доброї якості. Відрізняється тим, що оператору доводиться уточнювати і виправляти результати векторизації за допомогою зміни типу векторних об'єктів, злиття і розділення, видалення зайвих і дефектних об'єктів з матеріалів векторизації. Автоматизована векторизація залежить також від програмного забезпечення, на різних програмних продуктах результат може виходити різним. Також утруднений контроль якості векторизації.
Обробка та аналіз ДДЗ
Під даними дистанційного зондування розуміють аеро- та космічні знімки.
Етапи по створенню земельно-кадастрового банку даних з використанням ДЗЗ зображені на рис.2.
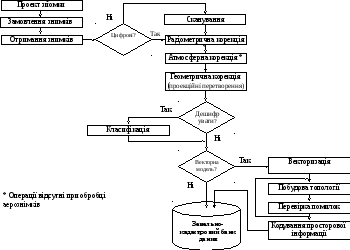
Рис.2. Етапи роботи з ДДЗ
Спочатку проводяться операції по покращенню зображень та приведення їх до єдиного вигляду, а потім проводиться тематичне дешифрування.
Основні етапи покращення даних ДЗЗ наступні:
Радіометрична корекція – приведення знімку або серії знімків до єдиної яскравості і контрастності та комбінації спектральних каналів для кращої візуалізації.
Атмосферна корекція – поліпшення характеристик знімку шляхом усунення перешкод, що завдає атмосфера Землі.
Геометрична корекція – трансформація зображення у необхідну систему координат і картографічну проекцію та усунення похибок, що завдає кривизна Землі. Для виконання цього етапу можуть знадобиться матеріали польвих зйомок.
Головною операцією по дешифрації даних ДЗЗ є класифікація отриманих знімків.
Класифікація – це процес перетворення безперервного растрового зображення в тематичне.
Існує два основних метода класифікації:
автономна (метод ISODATA) – дозволяє користувачу завдати основні куруючи принципи для визначення моделі класифікації у вигляді статистичних характеристик, але саме визначення класів і віднесення піксел зображення до того чи іншого класу відбувається повністю автоматично.
з навчанням (по еталонам) – заснований на використанні готових еталонів, спектральні характеристики яких зазвичай відповідають спектральним характеристикам реальних об’єктів. Еталони створюються шляхом розпізнавання і ідентифікації характерних об’єктів зображення (еталонних ділянок піксел) безпосередньо або з використанням додаткової інформації джерелом якої можуть буди інші зображення, дані польових робіт, карти різних видів тощо.
Всі еталони вносять у бібліотеку і вони можуть використовуватись далі в любій кількості операцій класифікації, уточнюватись і брати участь у створенні експертних систем.
Всі перетворення виконуються камерально за допомогою спеціального програмного забезпечення, наприклад, ERDAS Imagine.
Після тематичної класифікації отримані дані можуть брати участь у проведенні ГІС-аналізу або бути векторизовані. Дані можуть використовуватись, як в середовищі пакету обробки ДДЗ, так і бути експортовані в інші програмні пакети для подальшого використання.
Технологічна послідовність автоматизованого розпізнавання об'єктів на цифрових растрових зображеннях.
Розглянемо технологічну послідовність автоматизованого розпізнавання, що пропонується при використанні існуючих растрових карт, даних ДЗЗ або аерофотозйомки (рис2.1). Вхідне растрове зображення у цифровому вигляді підлягає попередньому обробленню внаслідок наявності характерних для сканованих та аерофотозображень декількох типів завад-(адитивних, мультиплікативних, імпульсних), великих розмірів цифрових масивів даних, обмеженості апаратно-обчислювальних ресурсів, відсутності достовірної апріорної інформації про характеристики об'єктів і систему формування зображень. Для попереднього оброблення частіше застосовують алгоритми локально-апертурної фільтрації .
В процесі сепарації інформативних зон визначають області зображення, які містять корисну інформацію. Для цих зон проводиться подальше оброблення.
Продовженням попереднього оброблення вхідного растру є сегментація. Мета та алгоритми сегментації залежать від алгоритмів векторизації та розпізнавання, що мають бути застосовані до даного зображення. Найчастіше критерієм векторизації є колір (яскравість, або ін.) пікселів [5], тобто об'єктом називають зв'язану множину пікселів однакового кольору (кластер) при тому, що суміжні з цією множиною пікселі мають інші кольори. В цьому випадку сегментація - це процес формування в інформативних зонах кластерів, які відловідають реальним об'єктам. Розпізнавання може також проводитися з викорис танням скелету контурного препарату. Для цього треба провести сегментацій таким чином, щоб виділити в окремі кластери границі об'єктів.
Від якості попередніх етапів оброблення зображення залежать хід та результат автоматичної векторизації. В ідеальному випадку множина векторних об'єктів повинна співпадати з множиною реальних об'єктів на зображенні.
Усунути та скоригувати всі завади на вхідних растрах принципово неможливо, додаткових опцій при налаштовуванні методів оброблення растрів може не вистачити для правильної сегментації. В цьому випадку залишкові завади ; сприймаються системою як об'єкти або частини об'єктів та переводяться при трансформаціях у векторний формат. Тому для підготовки до кінцевого розпізнавання необхідно провести попереднє оброблення отриманого векторного зображення. Таке оброблення базується на застосуванні методів, які за тими чи іншими ознаками класифікують векторні об'єкти як завади і, таким чином, стає можливим скоригувати помилки.
Наступним кроком для підвищення ефективності кінцевого розпізнавання є преселекція та сепарація об'єктів на інформативні прошарки. Преселекція являє собою класифікацію об'єктів за їх інтегральними параметрами (периметр, площа та ін.) . На цій стадії можливо відфільтрувати, наприклад, шумові об'єкти, які мають площу менше певного порогового значення. Або за значенням площі можливо виконати сортування полігонів на будівлі (менші значення) та поля без будівель (більші значення площі). Лінії можливо сортувати за довжиною, товщиною (зберігається як властивість лінії після скелетизації), орієнтацією, кутом повороту та іншими параметрами. Значення границь інтегральних параметрів в процесі експлуатації системи постійно уточнюються, а множина цих параметрів може доповнюватися новими, більш ефективними, що надають нових можливостей при обробленні.
За отриманими прошарками формуються множини зацікавленості, в яких після геоприв'язки проводиться кінцеве розпізнавання та сортування об'єктів.
В разі необхідності геоприв'язку виконують до етапу преселекції. Кінцеве розпізнавання являє собою широкий клас моделей та методів, які останнім часом іртрімко розвиваються.

Мал. 1. Технологія автоматизованого розпізнавання об'єктів на цифрових растрових зображеннях
2.3 Реалізації методу розпізнавання
графічних образів в системі ведення земельного кадастру.
Як зазначалося, найбільш ефективне заповнення КБД при використанні існуючих карт, даних ДЗЗ або аерофотозйомки буде проводитися у разі поєднання автоматичної векторизації та розпізнавання. Але заповнення КБД може відбуватися на основі існуючих векторних цифрових карт. В цьому випадку заповнення КБД удосконалюється завдяки застосуванню автоматизованого розпізнавання графічних образів. Наявність такої можливості вимагає реалізації у вигляді окремого програмного модулю (компоненту).
Блок преселекції також повинен бути реалізований у вигляді окремого програмного модулю (компоненту). Це дозволить використовувати його для підтримки первинного заповнення КБД та для виконання швидких узагальнений просторових запитів.
При використанні дігітайзерних технологій або напівавтоматичної векторизації стає можливим зосередити зусилля операторів на введенні графічної інформації. Після цього реалізується процес заповнення КБД з розпізнаванням.
Виходячи з опису технологічної послідовності автоматизованого розпізнавання цифрових растрових зображень (мал. 1), для його реалізації необхідне, виконувати інтенсивне попереднє оброблення растрів, що у загальному випадку може складати більше часу, ніж всі наступні етапи технологічної послідовності. Але алгоритми, які працюють при попередньому обробленні растрів та сегментації, використовують системи параметрів, значення яких з успіхом застосовують при обробленні растрів аналогічного походження, а тим більше при обробленні знімків фіксованої території. Растрові етапи технологічної послідовності розпізнавання вимагають початкового налаштовування (калібрації). Після цього відкалібровані растрові алгоритми багаторазово використовуються в автоматичному режимі, що особливо корисно при оновленні КБД. Таким чином, впровадження розпізнавання графічних образів в автоматизовану систему ведення земельного кадастру передбачає використання растрів аналогічного походження та алгоритмів їх оброблення, що калібруються.
Важливо, що при веденні земельного кадастру повинні використовуватися технології розпізнавання, які підтримують режим роботи з супервізором. У ролі супервізора в такій системі виступає оператор програмного комплексу введення первинної інформації. Таке рішення передбачає роботу в інтерактивному режимі, позволяє, по-перше, зменшити ймовірність помилок розпізнавання наступних трьох типів:
'"• об'єкт не розпізнано, тобто не віднесено до будь-якого з відомих класів (пропуск цілі);
• об'єкт, який «е належить ні до одного з відомих класів, помилково віднесено до одного з них (помилкова тривога);
• об'єкт, який належить до одного з відомих класів, помилково віднесено до іншого класу (помилкове розпізнавання).
По-друге, оператор може втручатися в процес розпізнавання, вносити будь-які корективи при заповненні КБД, розв'язувати спірні питання та ін.
Будь-який алгоритм розпізнавання передбачає віднесення об'єкту до того чи іншого типу на основі значень обчислених параметрів. Цей процес являє собою порівняння об'єкту з еталоном, або прототипом. Сукупність всіх прототипів, які використовуються для порівняння, складає базу прототипів.
Мінімальна кількість прототипів, яку необхідно зберігати, дорівнює кількості можливих кінцевих типів об'єктів. Але практично для розпізнавання застосовуються більш складні моделі, які можна характеризувати наступним чином:
1. Прототип за форматом збереження не є об'єктом кінцевого типу. Як правило, прототип зберігає припустимі границі параметрів, що використовуються для розпізнавання, та іншу необхідну і довідкову інформацію.
2. Як правило, еталоном типу є не один прототип, а множина прототипів. Ці еталонні об'єкти відрізняються, наприклад, довжиною вектора ознак. Одні єю з задач, які розв'язуються при розпізнаванні, є скорочення вектора ознак об'єкта, що підлягає розпізнаванню. Наприклад, базовий вектор ознак вектор ного об'єкта, що описує земельну ділянку, складається з координат вузлів ЗД та топології об'єкта. '
3. Для розпізнавання об'єкта можливе використання декількох баз прототипів, наприклад, у випадках:
розпізнавання за складовими елементами (для розпізнавання кожного елементу використовується власна база прототипів);
• розпізнавання проходить у декілька стадій, на кожній з яких об’єкт порівнюється з прототипами із баз, які відповідають поточній стадії
• при застосуванні преселекції об'єкти за значеннями обчислених інтегральних параметрів сортуються по декількох прошарках, то; для розпізнавання в кожному з них використовуються різні баз прототипів.
Вказані особливості передбачають формування, поповнення та підтримки; відносно великих баз прототипів, що повинно бути відображено у вимогах де відповідного програмно-апаратного забезпечення. Вимоги, які встановлюються до системи розпізнавання графічних образів в системі ведення земельного кадастру, відображені на мал.2.1.

Мал.2.1 Система розпізнавання графічних образів
форм систем з розвинутими засобами автоматизації та відкритою архітектур* При цьому важливо враховувати наступні критерії:
• складність та час розроблення, тестування та впровадження;
• зручність в експлуатації;
• швидкість роботи алгоритмів та ефективність використання обчислювальних ресурсів.
Процес атоматизованого розпізнавання об'єктів на растрових зображеннях вимагає наявності в системі крім власне модулів, які реалізують ключові алгоритми, це як мінімум, наступних компонентів: ;
• модулю зчитування вхідного растру (інтерфейс користувача, конверторізації
• модулю відображення растрових та векторних зображень;
• модулю редагування растрових та векторних зображень;
• конверторів, які зберігають вихідні векторні файли у форматах автоматизованих систем, які використовують результати розпізнавання.
Кожен з цих компонентів, а також ключові модулі, необхідно окремо розроблювати та тестувати. Все це значно підвищує складність, витрати на
розроблення, тестування та впровадження системи розпізнавання.
В тому випадку, коли інтерфейс користувача реїалізовано з урахуванням всіх відомих стандартів та вимог, залишається ймовішність виникнення незручностей в експлуатації системи розпізнавання внаслідок її неінтегрованості з системами, що використовують результати розпізнавання. 1
Алгоритми оброблення растрів і розпізнавання векторних об'єктів ставлять високі вимоги до обчислювальних ресурсів комп'ютерної системи. Тому реалізація системи розпізнавання безпосередньо у вигляді прикладної програми не вивгає додаткових витрат обчислювальних ресурсів та підвищує швидкість оброблення зображень.