

5. УСТРОЙСТВА И ЭЛЕМЕНТЫ АВТОМАТИКИ
5.1. Автоматические системы:
основные определения, функциональные схемы
Автоматическая система предназначена для управления какимлибо процессом без вмешательства оператора (человека). В такой системе функции оператора обычно сводятся к включению системы.
Любая автоматическая система, независимо от ее назначения и принципа работы элементов, состоит из двух основных частей: объекта управления (ОУ) и управляющего устройства (УУ). Процесс управления заключается в том, что управляющее устройство целенаправленно воздействует на объект управления для достижения запланированного результата. Данный процесс не может осуществляться без передачи информации от одной части системы к другой. Характер обмена информацией определяет основные особенности устройства таких систем, поэтому автоматические системы относятся к информационным системам.
По структурному построению автоматизированные устройства напоминают такие биологические системы, как, например, человек. На рис. 5.1 проведена аналогия между человеком и автоматом по способам получения сигналов, их обработки и накопления, а также по преобразованию сигналов. Органам чувств человека соответствуют датчики в автоматах, а функции активных органов выполняют исполнительные устройства. Аналогом мозга как центрального устройства для обработки сигналов служит ЭВМ с ее системой памяти.
Взависимости от способа использования информации различают разомкнутые (рис. 5.2, а) и замкнутые (рис. 5.2, б) автоматические системы.
Вавтоматических системах сигнал Х(t) от внешнего источника информация поступает на управляющее устройство (УУ). В разомкнутой системе УУ действует по жесткому алгоритму и в зависимости от характера Х(t) вырабатывает заранее определенные управляющие воздействия Z(t). Под действием Z(t) объект управления меняет свое состояние, но информация Y(t) об этом изменении в процессе управления не используется.
210
Рис. 5.1. Аналогия: человек-автомат
Примерами разомкнутой автоматической системы могут служить: часовой автомат, включающий и выключающий освещение в пассажирских вагонах в определенное время суток; автомат, включающий сигнализацию при пожарной опасности в определенных отсеках подвижного состава, и др.
Рис. 5.2. Разомкнутая (а) и замкнутая (б) автоматические системы
211
Перечисленные автоматические системы объединяет одно общее свойство: их автоматизм обеспечен и ограничен заранее заложенной в них программой действия, заранее заложенной информацией, движущейся в одном направлении — к исполнительному органу (в первом примере — к реле, во втором — к световой и звуковой индикации). В таких системах отсутствует контроль за изменением состояния объекта управления, а также учет этих изменений в процессе управления.
В реальных системах на объект управления действуют заранее непредвиденные возмущения, называемые помехами. Помехи могут возникнуть при изменении внешних условий (температура, влажность, электромагнитные импульсы, вибрации и т.д.) или внутреннего состояния системы (нестабильность источников питания, люфт движущихся деталей, «старение» свойств элементной базы и т.д.). Если влияние помех достаточно велико, то рассмотренные выше разомкнутые системы становятся неработоспособными. В этих случаях используются замкнутые автоматические системы, в которых управляющее воздействие Z(t) вырабатывается на основе информации об отклонении регулируемой величины Y(t) от требуемого значения Х(t), т.е. Z(t) является функцией рассогласования: Z(t) = Ф[X(t) – Y(t)].
На рис. 5.3, а приведена замкнутая автоматическая система с конструктивно разделенными объектом управления, исполнительным устройством и датчиком, а на рис. 5.3, б — замкнутая автоматизированная система, в которой обязательным звеном является человек (коллектив).
Во всех замкнутых системах проводится сравнение фактического Y(t) и заданного Х(t) значений выходной величины и устанав-
Рис. 5.3. Замкнутые автоматические системы: с конструктивно разделенным объектом управления (а), с участием оператора (б)
212

ливается связь между получившимися рассогласованием и новым управляющим воздействием, т.е. образуется непрерывный замкнутый цикл движения сигналов (информации). При этом целью работы системы является минимизация функции рассогласования. Характер функции Ф определяется конкретной системой, но в любой системе при совпадении фактического и заданного значений выходной величины, т.е. при Х(t) – Y(t) = 0, значение функции Ф и управляющего воздействия Z(t) равно нулю.
Сигналы, поступающие с выхода (объект управления) на вход системы (управляющее устройство), называются сигналами обратной связи, а цепь, по которой они поступают, — цепью обратной связи. Поэтому замкнутые системы также называют и системами с обратной связью, а разомкнутые — системами без обратной связи.
Как уже указывалось (см. рис. 5.3), автоматические устройства используются не только в автоматических системах управления, действующих без вмешательства оператора (человека), но и в автоматизированных системах управления (АСУ), в которых главное место отводится человеку. В таких системах автоматы участвуют в процессах получения, переработки и предъявления информации человеку-оператору (или коллективу операторов), который принимает окончательное решение и передает его как входную информацию следующим цепочкам автоматов, оптимальным образом выполняющих эти решения. К таким системам относятся, в частности, автоматизированные системы обучения.
5.2. Датчики различной физической природы
Большинство величин, характеризующих различные процессы, имеют неэлектрический характер: температура, освещенность, механические воздействия, магнитные поля и т.д. Поэтому в автоматических системах контроля и управления применяют разнообразные преобразователи неэлектрических величин в электрические сигналы.
Главный элемент измерительного преобразователя электрического сигнала — датчик. Важнейший параметр датчика — динамическая чувствительность К, равная отношению изменения выходной величины Y датчика к изменению входной величины ∆X / K = ∆Y / ∆X . Кроме достаточной чувствительности, датчик
213
должен обеспечивать необходимую точность преобразований в заданном диапазоне изменений входной величины, обладать достаточным быстродействием, не оказывать заметного влияния на контролируемую величину.
По принципу действия датчики делят на параметрические — преобразующие входную величину в параметры электрической цепи (R, С, L), и генераторные — преобразующие энергию входной величины непосредственно в электрическую энергию (рис. 5.4).
Для получения электрического сигнала от параметрического датчика необходима электрическая цепь с дополнительным источником электроэнергии. Эта вспомогательная электрическая цепь, в которой происходит преобразование изменения сопротивления Z на входе цепи в изменение напряжения (или тока) на выходе цепи [U = f(Z)], называется измерительной цепью.
Выходные сигналы датчиков в большинстве случаев имеют небольшие значения, соизмеримые с уровнем внешних помех, поэтому в состав преобразователей обычно входит усилитель сигнала. Если требуемый коэффициент усиления К = ∆Uвых / ∆Uвх < 10, то используют простой однокаскадный транзисторный усилитель. При К > 10 целесообразно применять операционные усилители.
Если преобразователь неэлектрической величины в электрический сигнал должен работать с цифровым устройством управления, то в состав преобразователя необходимо включать устройство, производящее квантование сигнала по уровню и во времени. Такое устройство называют аналого-цифровым преобразователем.
Рассмотрим наиболее распространенные типы датчиков. В общем случае структурная схема преобразователя неэлектрической величины в цифровой электрический сигнал (рис. 5.4) состоит из датчика, измерительной цепи, усилителя, АЦП. С развитием микроэлектроники появились микросхемы, соединяющие в одном корпусе все элементы преобразователя, кроме датчика. Такие схемы достаточно универсальны и могут работать с различными типами датчиков.
Рассмотрим наиболее распространенные типы датчиков. Датчики условно можно разбить на две большие группы:
• по воздействию факторов внешней среды (температура, магнитные поля, различные виды излучений: видимого света и инфракрасного, радиационного и акустического);
214
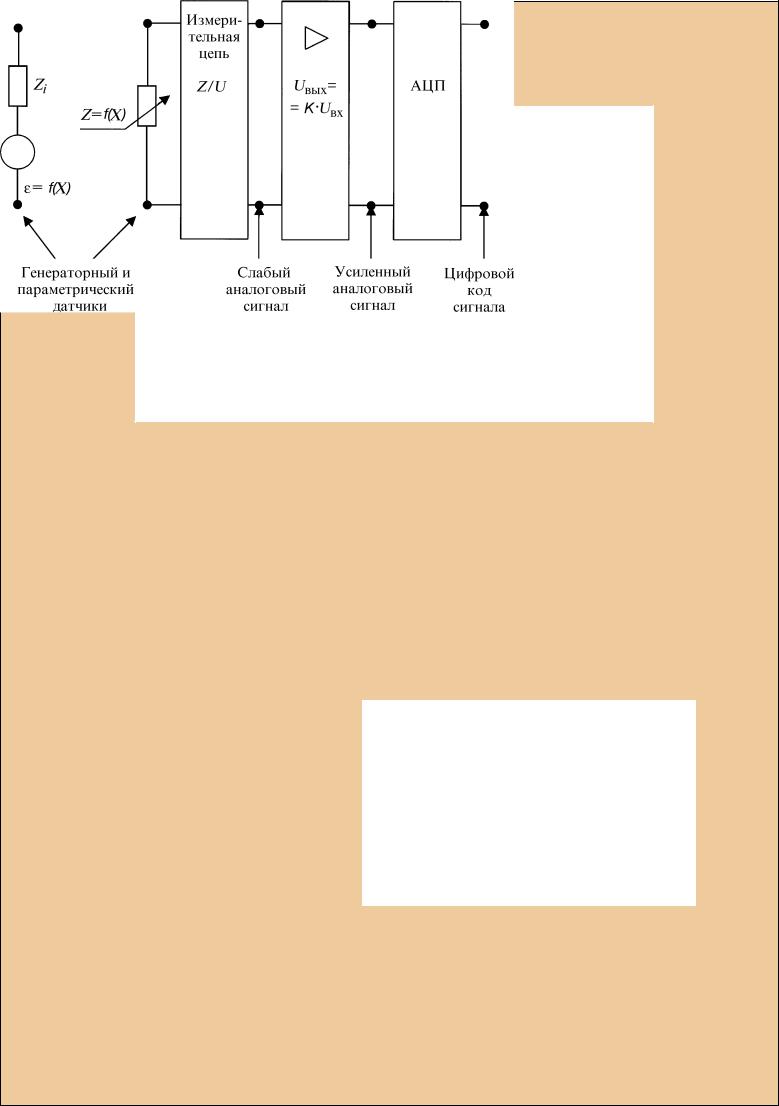
Рис. 5.4. Структурная схема датчиков-преобразователей
• по различным видам механических воздействий (удары, вибрации, ускорения, статистические давления).
Кроме указанных типов датчиков на подвижном составе используются и другие. К примеру, датчики величин перемещений, газов, влажности.
Наибольшее применение в современной электронной аппаратуре подвижного состава получили датчики температуры: термопары, терморезисторы и полупроводниковые датчики. Причем, последним отдается предпочтение. Принцип их работы базируется на температурной зависимости напряжения открыто-
го p-n перехода выпрямительного диода или тран-
зистора: Uпр = f(Т °С) при
Iпр = const. На рис. 5.5
приведена указанная зависимость. Основное преимущество этих датчиков температуры — достаточно высокая чувствительность (ТКН = 2 мВ/°C) и
215
линейность зависимости в широком диапазоне температур, что существенно облегчает практическую реализацию высокоточных датчиков температуры.
На рис. 5.6 приведена схема одного из вариантов измерителя температурывдиапазоне 40 °С ±80 °С с точностью 0,1°С. В качестве датчика температуры целесообразно использовать выпрямительные диоды и p-n переходы
биполярных транзисторов малой и средней мощности (не принципиально — германиевые или кремниевые); в качестве АЦП — микросхему типа К572ПВ2; в качестве цифровых индикаторов — АЛС 324; БП — блок питания.
Большое применение находят датчики излучений видимого света и инфракрасного — фотодатчики. Кроме указанных типов датчиков применяются фоторезисторы и фототранзисторы.
Работа фоторезисторов базируется на внутреннем фотоэффекте (генерация пары «электрон-дырка» в освещенном полупроводниковом материале). Сила тока фоторезистора прямо пропорциональна освещенности и приложенному напряжению. Вольт-амперная характеристика (рис. 5.7, б) фоторезистора — линейная. При отсутствии освещенности через прибор проходит небольшой темновой ток Iт, создаваемый свободными носителями заряда; при наличии светового потока Ф ≠ 0 возникает световой ток Iсв . Разница между этими двумя токами называется фототоком Iф = Iсв – Iт. Фоторезис-
Рис. 5.7. Условныеобозначения (а), ВАХ(б) исхемавключения фоторезистора (в)
216

торы характеризуются |
|
|
темновым сопротивле- |
|
|
нием (от 10 кОм до |
|
|
1 мОм), темновым то- |
|
|
ком, максимально до- |
|
|
пустимой |
рассеивае- |
|
мой мощностью и др. |
|
|
Схема включения фо- |
|
|
торезистора приведе- |
Рис. 5.8. Схемы включения фотодиодов с |
|
на на рис. 5.7, в. |
||
Схемы |
включения |
внешним источником (а) и без него (б) |
фотодиодов |
приведе- |
|
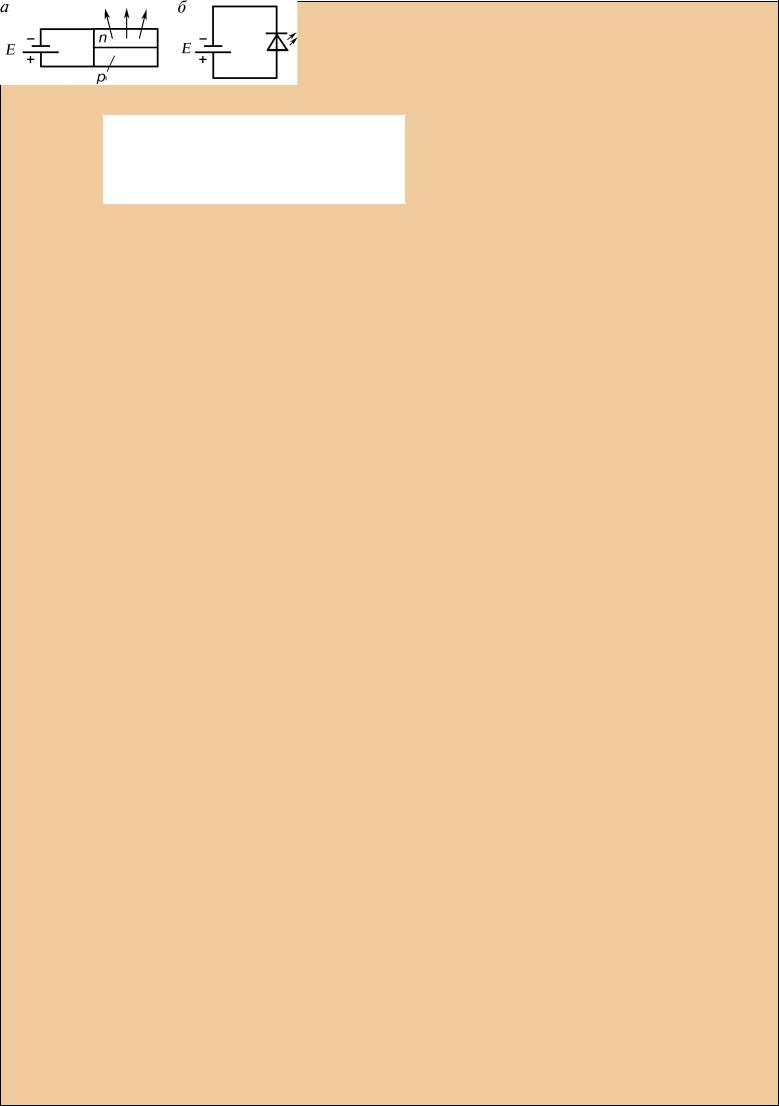
нынарис. 5.8, а и б. Освещаютобычнотолькооднуобласть(p илиn), напряжение от внешнего источника приложено в запирающем направлении (рис. 5.8, а), темновой ток незначителен. При освещении фотодиода генерируются дырки n-области в p-область и через диод проходит ток незначительной величины.
На рис. 5.8, б показано включение p-n перехода без внешнего источника питания. При облучении светом в нем генерируются дополнительные носители заряда, которые переходят в область с другим типом электропроводности и частично компенсируют заряды в запирающем слое. Таким образом, в цепи создается ток, т.е. p-n переход становится источником ЭДС (фотоэлектродвижущей силы). Этот тип перехода называют фотоэлементом. При подключении ряда фотоэлементов друг к другу получают фотобатареи (солнечные батареи).
Фотодиоды обладают большими значениями обратного напряжения (десятки вольт), Iт — достигает десятков микроампер. Их интегральная чувствительность колеблется от 2 до 20 мА/ лм.
На рис. 5.9, а приведено условное обозначение датчика фототранзистора — прибора с двумя p-n переходами и выводами от эмиттера и коллектора.
217
Так как коллекторный переход смещен в обратном направлении, через неосвещенный прибор проходит слабый темновой ток (рис. 5.9, б). При облучении светом базы в ней вследствие внутреннего фотоэффекта образуются электро-
ны и дырки. Дырки смещаются в коллектор. Оставшиеся в базе электроны снижают потенциальный барьер эмиттерного перехода. В результате увеличивается диффузионное движение дырок через эмиттерный переход, что приводит к росту обратного тока.
Для температурной стабилизации предусматривается вывод от базы. Чувствительность транзисторного фотодатчика выше, чем у ранее рассмотренных, и колеблется от 100 до 500 мА/ лм.
Часто фотодатчики работают в устройствах совместно со светодиодами — приборами, излучающими свет при интенсивной рекомбинации электронов и дырок в узком слое перед p-n переходом (рис. 5.10). В зависимости от используемого полупроводникового материала в светодиодах излучение бывает в разных диапазонах инфракрасного и видимого света.
Фотоэлементы — это «глаза» многих автоматических, измерительных и управляющих устройств. Они применяются для регулировки, включения и отключения освещения; для контроля расстояний до объектов; для измерений скорости вращения вала двигателя и его угла поворота; дистанционного управления работой аудиовизуальной техники. Интенсивность света может быть показателем температуры излучателя теплоты (дымовых газов, масла, угольной пыли и др.). Особенно эффективным бывает применение фотодатчиков для контроля объектов в особо трудных и опасных для жизни человека местах.
В современной электроскопии устройств подвижного состава и рельсов широко используются ультразвуковые методы контроля (УЗК). В качестве датчиков и излучателей ультразвуковых колебаний используются пьезоэлектрические преобразователи (ПЕП). На рис. 5.11 приведен разрез ПЕПа. В качестве пьезоэлемента используются пластины из монокристалла кварца или пьезокерамических материалов: титаната бария, цирконат титана, свинца и др. Для из-
218
готовления преобразователей (вставок резонаторов) современных дефектоскопов чаще всего используется ПЕП из цирконат титаната свинца марки ЦТС-19.
На плоские пластины поверхности пьезоэлементов наносят тонкие слои серебра, служащие электродами. При подведении к электродам знакопеременного электрического напряжения пьезоэлемент
совершает вынужденные электромеханические колебания (растягивается и сжимается) с частотой подаваемого электрического напряжения. Данное явление называется обратным пьезоэффектом.
При воздействии на пьезоэлемент механических колебаний на его электродах возникает знакопеременное электрическое напряжение, величина которого пропорциональна прилагаемому к пьезоэлементу усилию. Это явление носит название прямой пьезоэффект.
Амплитуда колебаний пьезоэлемента зависит от напряжения на электродах и соотношения частоты подаваемого на него переменного напряжения и собственной частоты колебаний элемента. Наибольшая амплитуда колебаний ПЕП достигается при резонансе, то есть когда его собственная частота колебаний совпадает с частотой возбуждающего переменного напряжения. Собственная частота f элемента зависит от его толщины b и скорости упругих волн С: f = C / 2b (для пьезокерамики ЦТС-19 скорость ультразвуковой волны С = 3300 м/с). На практике используются пластины ПЕП с толщинами 0,3, 0,7 и 1,3 мм. Наибольшее применение нашли ПЕП с пластинами толщиной 0,7 мм, у которых резонансная частота f0 = 2,5 мГц.
Сущность работы датчика ультразвуковых колебаний состоит в следующем: если на пути распространения ультразвуковой волны встречается другая среда (среда с другими акустическими свойствами ), то одна часть энергии проходит во вторую среду, а другая часть — отражается в первую. Распределение энергии между отраженной и прошедшей волнами определяется соотношением их акус-
219
тических сопротивлений сред. На принципе отражений ультразвуковых волн от неоднородностей металла и основана выявляемость дефектов ультразвуковым эхо-методом, так как трещины, включения и другие несплошности отличаются по своему акустическому сопротивлению от сопротивления основного металла.
Рассмотрим кратко принцип работы датчиков магнитных полей. Главная особенность магнитных датчиков — их быстродействие, возможность обнаружения и измерения бесконтактным способом. Однако при этом требуется небольшое расстояние от воздействующего магнитного поля. Наиболее современными и эффективными датчиками магнитного поля являются датчики Холла, относящиеся к типу гальваномагнитных преобразователей. Они применяются для измерения индукции магнитного поля, угловых и линейных перемещений.
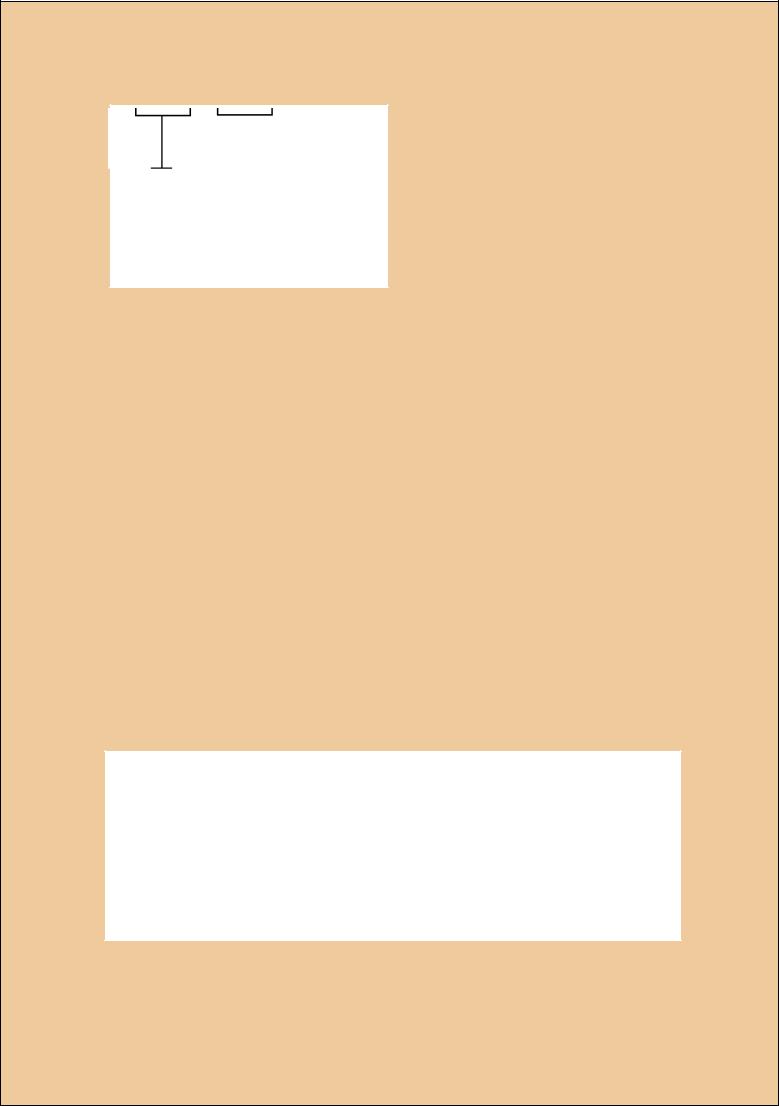
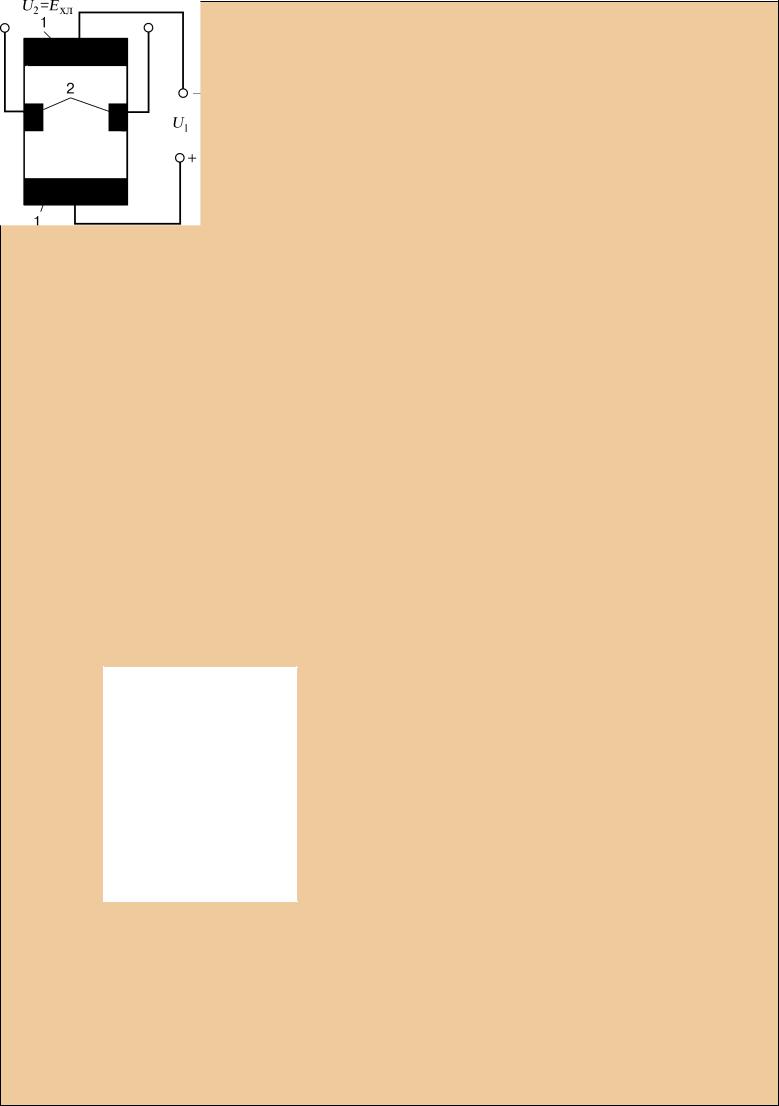
Работа датчиков Холла основана на физических эффектах, возникающих в магнитном поле твердых тел при движении в них заряженных частиц. На рис. 5.12 представлена конструкция датчика Холла. В полупроводниковой пластине или пленке, помещенной в магнитное поле, при пропускании через нее электрического тока (электроды 1) на электродах 2 возникает ЭДС: Eхл = KIB/h (где: K = χρ — постоянная Холла, м2·А; χ — подвижность носителей тока, м2 В; ρ — удельное сопротивление материала пластины, Ом·м.
Наиболее сильно эффект Холла проявляется в германии, кремнии и полупроводниках, выполненных на основе элементов третьей (III и...) группы периодической
системы.
У всех вышеперечисленных датчиков информационный сигнал составляет единицы милливольт, поэтому, как правило, совместно с датчиком применяются предварительные усилители.
Датчики механических величин подразделяются на датчики перемещения, давления, скорости и ускорения.
К датчикам перемещения относятся: реостатные, тензолитовые, индуктивные, трансформаторные (сельсин-датчики) и емкостные.
220