

Министерство образования Республики Беларусь
БЕЛАРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ
И РАДИОЭЛЕКТРОНИКИ

Кафедра систем управления
Н.И.Сорока, Г.А.Кривинченко
ТЕЛЕМЕХАНИКА
Конспект лекций
для студентов специальности
I-53 01 07 “Информационные технологии и управление
в технических системах”
Часть 1
Сообщения и сигналы
Минск 2013
УДК 621.398 (075.8)
ББК 32.968 я 73
С65
Рецензент: нач. кафедры электротехники Военной академии Республики Беларусь канд.техн.наук доц. В.Е.Гурский
С
С65 Телемеханика:
Конспект лекций для студентов
специальности
Т.11.01.00 “Автоматическое управление в технических системах”. Ч. 1: Сообщения и сигналы. – Мн.: БГУИР, 2001.-215 с.: ил. 98.
ISBN 985-444-091-5 (ч.1).
В конспекте рассмотренные спектры периодических и непериодических сигналов устройств телемеханики, также методы и технические средства модуляции и демодуляции, применяемы в системах телемеханики.
УДК 621.398 (075.8)
ББК 32.968 я 73
ISBN 985-444-091-5 (ч.1)
ISBN 985-444-151-2

Н.И.Сорока, Г.А.Кривинченко,
2001
Содержание
Введение
В.1 Определение, задачи и проблемы
Телемеханика вместе с такими научно-техническими отраслями, как связь и автоматика, определяет принципы построения автоматизированных и автоматических систем управления пространственно распределенными техническими процессами. Международный электротехнический словарь [1] определяет: «Телемеханика – контроль и управление оперативными объектами на расстоянии посредством преобразования управляющих воздействий и контролируемых параметров в сигналы, передаваемые по каналам связи».
Средства телемеханики решают две основные задачи:
- передачу технологической, известительной и командной информации (измерение текущих и интегральных значений контролируемых параметров, сигнализация состояния оборудования, буквенно-цифровые сообщения о ходе процессов, команды управления и регулирования);
- передачу производственно-статистической информации для целей планирования и управления работой промышленных и торговых предприятий, продажи авиационных и железнодорожных билетов, бронирования мест в гостиницах и т.п.
Вторая задача решается также специальной аппаратурой передачи данных.
Научной основой телемеханики является теория передачи информации.
Отличительной особенностью систем телемеханики от традиционных систем связи является:
- повышенная точность (порядка 0,05%);
- недопустимость запаздывания в получении информации;
- высокая надежность;
Кроме того, в системах телемеханики человек присутствует не более чем на одной из сторон, а в системах связи человек присутствует на обеих сторонах.
Характеристики, отличающие системы телемеханики от местных систем управления, следующие:
- использование каналов связи с ограниченной шириной полосы пропускания в условиях высокого уровня помех;
- требование оптимального соотношения между скоростью и надежностью передачи информации для обеспечения передаваемого количества данных и заданного времени передачи;
- проблемы, связанные с высоким уровнем помех из-за большой протяженности каналов связи и сети и в ряде случаев разнотипных каналов связи;
- централизованность управления многочисленными территориально распределенными объектами.
В телемеханике при передаче информации возникают следующие проблемы:
- достоверности, т.е. передачи информации с малыми искажениями;
- эффективности, т.е. нахождения наилучших методов и способов использования аппаратуры и линии связи при передаче большого количества информации;
- экономичности, т.е. построения простых и дешевых устройств обеспечивающих наибольшее количество передаваемой информации при наименьших затратах.
Телемеханика применяется практически во всех сферах деятельности человека. В первую очередь в труднодоступных местах и вредных для здоровья человека производствах. В последнее время широкое применение нашла в логистике, телематике, навигации и управлении беспилотными летательными аппаратами.
В.2 Типовая структура и конфигурации систем телемеханики
Структуру системы следует понимать как иерархический порядок ее основных элементов и их взаимодействий, что в совокупности составляет систему и определяет ее характеристики. Конфигурация системы представляет собой определенное расположение телемеханических станций и связей между ними.
Основные элементы систем телемеханики (СТМ) – это аппаратные и поддерживающие их работу программные средства, выполняющие функции сбора, передачи, обработки и отображения информации о состоянии обслуживаемого технологического процесса. Состав структурных элементов показан на рисунке В1 на примере простейшей СТМ с конфигурацией типа «точка-точка»: аппаратура связи с процессом, выполняющая функции ввода-вывода аналоговых и дискретных сигналов измерения, сигнализации, управления и регулирования; устройства телемеханики (УТМ) контролируемого пункта (КП); аппаратура передачи данных (АПД) со стороны контролируемого и контролирующего пунктов; УТМ контролирующего пункта (далее – пункта управления, ПУ); аппаратура автоматизированных рабочих мест (АРМ) лиц, принимающих управленческие решения (операторов/диспетчеров), решающая задачи обработки и архивирования данных и организации человеко-машинного интерфейса (HMI/SCADA). В структуре СТМ «в широком смысле» выделены канал данных и СТМ «в узком смысле». Структурное выделение канала данных предполагает, что среда передачи сигнала выбирается из ряда альтернатив: она может быть выделенной, арендуемой или общего пользования. СТМ в узком смысле – это уровень создания телемеханической сети.
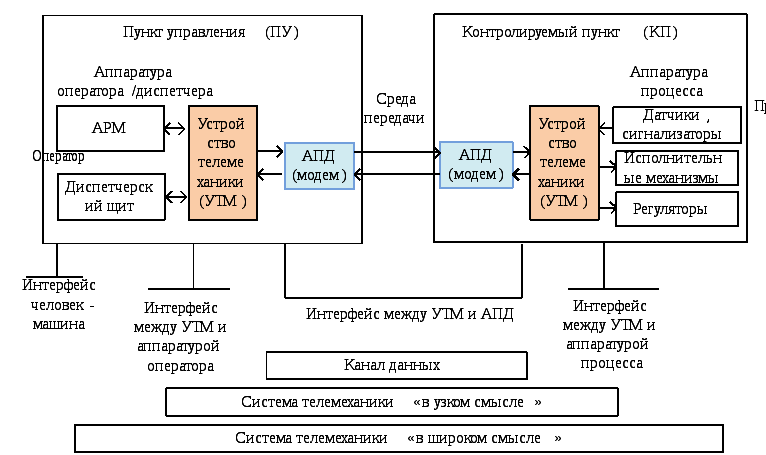
Рисунок В.1 – Типовая структура СТМ (конфигурация «точка-точка»)
Для передачи информации в канале данных определены три типа трафика: симплексный (передачи производятся только в одном направлении – от КП к ПУ); полудуплексный (передача от КП к ПУ и от ПУ к КП осуществляется поочередно); дуплексный (передачи по каждому направлению осуществляются по независимым каналам связи).
Исходя из определения «Телемеханика» и структурной схемы (см. рисунок В.1) приведем определения основных понятий в области телемеханики.
Центральный телемеханический пункт управления (ЦПУ) – это телемеханический пункт управления, с которого осуществляется контроль и управление всеми объектами иерархической телемеханической сети.
Телемеханический пункт управления (ПУ) – пункт, с которого осуществляется управление объектами контролируемых телемеханических пунктов и контроль их состояния.
Контролируемый телемеханический пункт (КП) – место размещения объектов, контролируемых или управляемых средствами телемеханики.
Комплекс устройств телемеханики – совокупность устройств АУ и КП, предназначенных для совместного применения в телемеханических системах.
Телемеханическая система – совокупность устройств ПУ и КП, периферийного оборудования, необходимых линий и каналов связи, предназначенных для совместного выполнения телемеханических функций.
Телемеханическая сеть – совокупность устройств телемеханики и объединяющих их каналов связи.
В конфигурацию сети передачи данных входят основные функциональные элементы, указанные в таблице В.1, которые в совокупности составляют основу для построения всех конфигураций.
Таблица В.1 – Символы конфигурации телемеханической сети
|
Основная функция символа |
Обозначение |
|
1 Главный центральный пункт управления (ЦПУ) |
|
|
2 Пункт управления (ПУ),в состав которых входят один или более линейных терминалов. Примечание- маленькие окружности показывают число линейных терминалов на этом ПУ. |
|
|
3 Контролируемый пункт (КП),удаленный терминал. |
|
|
Основная функция символа |
Обозначение |
|
4 Пункты сбора ,концентрации и обмена информации. |
|
|
5 Канал передачи данных. |
|





Ниже иллюстрируются возможные варианты конфигураций каналов СТМ.
Конфигурация «точка-точка» (пункт-пункт) (рисунок В.2). Эта конфигурация связывает между собой две телемеханические станции и является простейшей из всех возможных типов конфигураций.
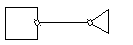
Рисунок В.2 – Конфигурация «точка-точка»
Конфигурация радиальная «точка-точка» (рисунок В.3). ПУ связан с каждым КП индивидуальным каналом передачи данных. При этом количество линейных терминалов (АПД) на ПУ равно количеству подключенных КП, что позволяет ПУ одновременно и независимо передавать сообщения одному, группе или всем КП, а каждый КП может одновременно и независимо передавать данные на ПУ.

Рисунок В.3 – Конфигурация радиальная «точка-точка»
Конфигурация радиальная многоточечная (рисунок В.4). На ПУ установлен один линейный терминал (АПД), к которому индивидуальными линиями связи подключены более одного КП. При этом одновременно только один КП может передавать данные на ПУ, а ПУ может передавать данные одному или нескольким КП одновременно.

Рисунок В.4 – Конфигурация радиальная многоточечная
Конфигурация цепочечная (магистральная) (рисунок В.5). На ПУ установлен один линейный терминал (АПД), к которому общей линией подключено более одного КП. При этом одновременно только один КП может передавать данные на ПУ, а ПУ может передавать данные одному или нескольким КП одновременно.

Рисунок В.5 – конфигурация цепочечная
Конфигурация многоточечная кольцевая (рисунок В.6). Линия связи, проходящая через все КП, образует кольцо, по которому информация от ПУ любому КП (и обратно) может быть отправлена в одну или другую сторону (например, при обрыве линии связи).

Рисунок В.6 – Конфигурация многоточечная кольцевая
Конфигурация смешенная (рисунок В.7). Комбинация различных конфигураций. Наряду с ПУ и КП в структуре СТМ могут использоваться пункты сбора, концентрации информации и обмена ею.
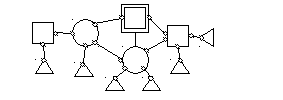
Рисунок В.7 – Конфигурация смешенная
Взаимодействие оборудования ПУ и КП инициируется в СТМ одной из перечисляемых далее процедур запуска передачи телемеханических сообщений.
- По факту изменения состояния (спорадическая передача). Передачу инициирует КП по факту события на объекте, что позволяет минимизировать время представления информации оператору. При этом спорадически может передаваться как высокоприоритетная информация (например, аварийная), так и низкоприоритетная (например, данные амплитудной дискретизации контролируемых процессов, находящихся в пределах рабочей зоны).
- Передача по запросу. Инициируется ПУ путем адресного обращения к КП с запросом информации о текущем состоянии объекта или с командой управляющего воздействия на объект адресуемого КП в той или иной форме. Если ПУ периодически осуществляет последовательный опрос всех или какой-то группы КП, то такая операция определяется как циклоопрос.
- Периодическая (циклическая) передача. Инициируется КП для передачи информации на ПУ с заданным временным разделением (временная дискретизация контролируемых процессов). Периодическая передача определяет временные задержки обновления информации в АРМ. Эти задержки тем больше, чем дольше передается информация от одного КП и чем большее количество КП в составе СТМ. Следует отметить, что при периодической передаче сообщений из КП потеря некоторых сообщений в канале связи не является критичной, так как обновление информации будет выполнено в процессе следующих передач.
Кроме того имеются телемеханические системы с общим автоматическим опросом – телемеханические системы, в которых после обнаружения ошибки автоматически посылается команда запроса всей информации о состоянии контролируемых объектов.
В телемеханических системах с квинтированием посылается квинтация после приема спорадического сообщения без обнаружения ошибки.
В.3 Классификация систем телемеханики
Телемеханические системы классифицируются по выполняемым функциям, виду и расположению объектов, управления и контроля, конфигурации линий связи, используемым каналам связи, дальности, характеру и способу передачи сообщений.
Под выполнением функций понимается исполнение системой различных категорий информационных сообщений. В зависимости от этого системы телемеханики подразделяются на системы телеуправления (ТУ), телесигнализации (ТС), телеизмерения (ТИ), телерегулирования (ТР) и передачи данных (ПД) по каналам (линиям) связи телемеханической сети.
При этом число объектов измерения, сигнализации, управления и регулирования, число источников данных, от (для) которых может передавать информацию устройство телемеханики принято называть информационной емкостью устройства телемеханики.
ТУ – управление положением или состоянием дискретных объектов и объектов с непрерывным множеством состояний методами и средствами телемеханики. В связи с этим ТУ подразделяется на двухпозиционное телеуправление и телеуправление объектами, имеющие более двух возможных состояний.
ТС – получение информации о состоянии контролируемых и управляемых объектов, имеющих ряд возможных дискретных состояний, методами и средствами телемеханики.
ТИ – получение информации о значениях измеряемых параметров контролируемых и управляемых объектов методами и средствами телемеханики.
ТР – телеуправление объектами с непрерывным множеством состояний.
ПД – получение информации, представленной в форме, воспринимаемой для формальной обработки автоматическим устройством или человеком.
При ТУ различают следующие виды команд и сообщений:
- команда ТУ – телемеханическое сообщение, передаваемое с ПУ на КП и вызывающее изменение положения или состояния объектов.
- групповая команда ТУ – команда ТУ, адресованная нескольким объектам одного КП.
- циркулярная команда ТУ – команда ТУ, адресованная объектам нескольких или всех КП телемеханической системы.
- команда-инструкция – команда ТУ, передаваемая с ПУ на КП оперативному персоналу, где она выводится на устройства отображения в виде стандартных инструкций.
- телемеханическая команда опроса – телемеханическое сообщение, требующее от КП передачи информации о состоянии объектов.
- оперативная телеинформация – часть телемеханического сообщения, содержащая команды ТУ или информацию о состоянии объектов.
- служебная телеинформация – телемеханическое сообщение или часть его, необходимая для контроля состояния телемеханической системы и управления ею.
- квитирование телемеханического сообщения – операция, производимая оператором или автоматом для подтверждения приема информации от устройства телемеханики.
Различают ТИ по вызову и выбору. ТИ по вызову – это ТИ по команде, посылаемой с ПУ на КП и вызывающей подключение на КП передающих устройств, а на ПУ – соответствующих приемных устройств. ТИ по выбору – это ТИ путем подключения к устройству ПУ соответствующих приемных приборов при постоянно подключенных передающих устройствах на КП.
Разновидностью телемеханических систем является телеавтоматическая система – совокупность устройств телемеханики, каналов связи и устройств автоматики, обеспечивающая управление объектом на расстоянии без воздействия человека. В этой системе функции управления обычно возлагаются на ЭВМ.
По виду объекты управления и контроля могут быть разделены на подвижные (краны, локомотивы и т.п.) и стационарные. По расположению стационарные объекты подразделяются на сосредоточенные и рассредоточенные. В первом случае технически и экономически целесообразна установка одного устройства телемеханики контролируемого пункта для значительной группы объектов. Во втором – установка отдельных устройств телемеханики контролируемых пунктов для небольших групп и даже одиночных объектов.
Используемые в телемеханике каналы связи подразделяются на проводные, радио и ВЧ каналы по ВЛ. Скорости передачи данных систем телемеханики находятся в пределах от 50 до 2400 бит/с. Скорости 4800 и 9600 бит/с используются реже. Для скоростей передачи свыше 9600 бит/с требуются специальные широкополосные каналы, которые используют стандартную технику на различных каналах связи.
Следует различать следующие понятия каналов: канал связи, канал передачи данных и канал функций. Канал связи – совокупность технических средств и тракта (среда, кабель, проводная линия и т.д.) для передачи сообщений на расстояние. Канал передачи данных – совокупность канала связи и расположенных на его входе и выходе устройств передачи данных. Канал функции – часть устройства телемеханики, обеспечивающая прием или передачу одного параметра заданной функции (ТУ, ТС, ТИ, ПД и т.д.).
Различают периодический и непрерывный режимы работы устройств телемеханики. Периодический режим работы изделия – это режим, при котором изделие включается периодически по сменам, сезонам и т.п. Непрерывный режим работы – это режим, при котором изделие постоянно находится во включенном состоянии за исключением времени, необходимого для технического обслуживания.
Существуют два типа процедур передачи сообщений: небалансная и балансная.
Небалансная процедура передачи используется в СТМ, в которых ПУ контролирует трафик данных последовательным опросом КП. В этом случае ПУ всегда является первичной станцией, инициирующей передачу всех сообщений, а КП – вторичной станцией, передающей сообщения только по вызову. Областью использования данной процедуры являются конфигурации СТМ всех типов.
Балансная процедура передачи используется в СТМ, в которых каждая станция может быть как первичной, инициирующей передачу сообщений, так и вторичной. Область использования такой процедуры передачи ограничивается конфигурациями типа «точка-точка» и радиальной многоточечной структуры.
По способу передачи сообщения СТМ подразделяются на одноканальные и многоканальные. В первых сигнал соответствует одному сообщению об определенном объекте управления или контроля, во вторых – ряду сообщений, относящихся к различным объектам управления и контроля.
По характеру сообщения СТМ делятся на дискретные и непрерывные.
В.4 Технические требования
В стандарте [5] регламентируются требования к источникам питания и электросовместимости.
Параметры
источников питания УТМ: однофазная сеть
переменного тока (АС) с номинальным
напряжением 220 В при допустимых отклонениях
напряжения в диапазонах ![]() 10%,
от -15 до +10%, от -20 до +15% и частоты в пределах
10%,
от -15 до +10%, от -20 до +15% и частоты в пределах
![]() 0,2%,
0,2%,
![]() 1,0%,
1,0%,
![]() 5,0%;
сеть постоянного тока (DC)
с номинальным напряжением 12, 24, 48, 60, 115,
220 В при допустимых отклонениях
5,0%;
сеть постоянного тока (DC)
с номинальным напряжением 12, 24, 48, 60, 115,
220 В при допустимых отклонениях ![]() 10%,
10%,
![]() 15%,
от -20 до
+15%
15%,
от -20 до
+15%
В [6] определяются допустимые условия эксплуатации УТМ в части влияния климатических, механических и других неэлектрических величин.
В таблице В.2 [6] показаны наиболее активно используемые климатические параметры условий эксплуатации УТМ.
Устройства всех классов должны работать при изменении атмосферного давления в пределах от 70 до 106 кПа, что соответствует высоте до 3000 м над уровнем моря.
Классификационные параметры допустимых механических воздействий для условий хранения, эксплуатации и транспортирования представлены в таблице В.3 [6] четырьмя классами.
В стандарте [6] для УТМ, устанавливаемого в неизвестном месте, определены три класса сейсмического воздействия (по шкале Меркалли) (таблица В.4).
Шкала Меркалли, ассоциируется с действительной интенсивностью в данной географической местности и имеет диапазон от 1 (ощущений нет) до XII баллов (катастрофа).
Таблица В.2 – Классы климатических требований к исполнениям УТМ
|
Класс |
Температура, °С |
Относительная влажность, % |
Скорость изменения температу-ры, °С/мин |
Размещение |
|
А1 |
от +20 до +25 |
от 20 до 75 |
0,1 |
Кондиционирование |
|
В1 |
от +15 до +30 |
от 10 до 75 |
0,5 |
Обогреваемые или охлаждаемые помещения |
|
В2 |
от +5 до +40 |
от 5 до 85 | ||
|
В3 |
от +5 до +40 |
от 5 до 95 с конденсацией | ||
|
С1 |
от -25 до +45 |
от 5 до 95 с конденсацией |
0,5 |
Под крышей или в закрытых помещениях |
|
С2 |
от -25 до +55 |
от 10 до 100 с конденсацией |
0,5 | |
|
С3 |
от -40 до +70 |
от 10 до 100 с конденсацией |
1 | |
|
D1 |
от -33 до +40 |
от 15 до 100 с конденсацией |
0,5 |
На открытом воздухе |
|
D2 |
от -50 до +40 |
Таблица В.3 – Классы механических требований к исполнениям УТМ
|
Механические параметры |
Класс | |||||||||||
|
Am |
Bm |
Cm |
Dm | |||||||||
|
Стационарная синусоидальная вибрация -амплитуда перемещения, мм -амплитуда ускорения, м/с2 -диапазон частот, Гц |
0,3
2-9 |
1 9-200 |
200-500 |
3
2-9 |
10 9-200 |
15 200-500 |
7
2-9 |
20 9-200 |
15 200-500 |
15
2-9 |
50 9-200 |
40 200-500 |
|
Удары -длительность половины синусоид, мс -пиковое ускорение, м/с2 |
22 40
|
11 100 |
11 300 |
6 1000 | ||||||||
|
Свободное падение, м -масса менее 20 кг -масса от 20 до 100 кг -масса более 100 кг |
|
|
0,25 0,25 0,1 |
1,5 1,2 0,5 | ||||||||
|
Статическая нагрузка, кПа |
|
|
5 |
10 | ||||||||
Таблица В.4 – Классы сейсмического воздействия
|
Класс |
Описание интенсивности |
Интенсивность по шкале Меркалли, баллов |
|
S1 |
От легкого до среднего землетрясения |
До VI |
|
S2 |
От среднего до сильного землетрясения |
До VIII |
|
S3 |
От сильного до очень сильного землетрясения |
До X |
В [7] объектом стандартизации являются электрические характеристики интерфейсов на границах между УТМ и внешним оборудованием.
При рассмотрении интерфейса между УТМ и АПД не исключается возможность включения АПД в состав УТМ. Интерфейс сопряжения УТМ с каналом связи в стандарте определяется в соответствии с требованиями рекомендаций Международного консультативного комитета по телефонной и телеграфной связи (МККТТ, ныне Международный телекоммуникационный союз – ITU-T) серий R и V. Цепи обмена между УТМ и АПД должны соответствовать рекомендациям ITU-T V.24 (1989) «Перечень определений линий стыка между оконечным оборудованием данных и аппаратурой оконечного канала данных». Электрические характеристики интерфейса должны соответствовать рекомендациям:
- ITU-T V.28 (1989) для несимметричных двухполярных цепей обмена с оконечной аппаратурой, выполненной на по технологии дискретных элементов.
-ITU-T V.10 (1989) для несимметричных двухполярных цепей обмена с оконечной аппаратурой, выполненной на интегральных схемах.
-ITU-T V.11 (1989) для несимметричных двухполярных цепей обмена с оконечной аппаратурой, выполненной на интегральных схемах.
Механические (разъемные) соединения рекомендуется выполнять в соответствии со стандартами международной организации по стандартизации ISO (ИСО), указанными в таблице В.5.
Таблица В.5 – Описание внешних соединений УТМ
|
МККТТ – ITU-T |
ISO (ИСО) | |
|
Функции |
Электрические характеристики |
Соединения |
|
V.24 |
V.28 |
ISO 2110 (25-контактный разъем) |
|
V.24 |
V.10 |
ISO 4902 (37-контактный разъем) |
|
V.24 |
V.11 |
ISO 4902 (37-контактный разъем) |
Рекомендуемые
значения аналоговых сигналов предлагается
выбирать из числа токовых сигналов в
диапазонах: 0…5 мА, 0…10 мА, 4…20 мА, ![]() 5
мА,
5
мА, ![]() 10
мА.
10
мА.
Физическая реализация интерфейса между УТМ и аппаратурой процесса – это линия связи, по которой передается информация с помощью дискретных и аналоговых сигналов.
Основные характеристики интерфейсных сигналов определяются номинальными значениями напряжений и классами токов для двоичных сигналов, а также предельными значениями напряжений и требованиями к изоляции для дискретных и аналоговых сигналов.
Значения двоичных сигналов в стандарте ограничиваются номинальными напряжениями (Uном) постоянного тока: 12 В, 24В, 48В, 60В. Для пассивного двоичного входа номинальные значения напряжения могут быть определены по согласованию между изготовителем и пользователем.
Классы токов для двоичных входных и выходных сигналов согласно [7] представлены в таблице В.6
Таблица В.6 – Классы токов для двоичных входных и выходных сигналов
|
Класс тока |
Двоичные входные сигналы постоянного и переменного тока, мА |
Двоичные выходные сигналы | ||||
|
Постоянный ток, А |
Переменный ток, А | |||||
|
мин |
макс |
мин |
макс |
мин |
макс | |
|
1 |
1 |
5 |
- |
0,1 |
- |
0,2 |
|
2 |
5 |
10 |
0,05 |
0,5 |
0,1 |
1 |
|
3 |
10 |
50 |
0,1 |
1 |
0,2 |
2 |
|
4 |
50 |
- |
0,25 |
2,5 |
0,5 |
5 |
Двоичные входные и выходные сигналы различаются как активные и пассивные. Временные диаграммы двоичных сигналов показаны на рисунке В.8.
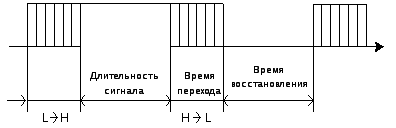
Рисунок В.8 – Временные параметры двоичных сигналов
Таблица В.7 – Активные двоичные входные и выходные сигналы
|
Характеристика
|
Значение | |
|
Входной сигнал |
Выходной сигнал | |
|
Сигнал низкого уровня (L) |
Минимальное: -5% от Uном Номинальное: 0% от Uном Максимальное: +15% от Uнорм |
Минимальное: 0% от Uном Номинальное: 0% от Uном Максимальное: +10% от Uнорм |
|
Ток максимальный: 0,2 мА | ||
|
Сигнал высокого уровня (H) |
Минимальное: +75% от Uном Номинальное: +100% от Uном Максимальное:
|
Минимальное: +80% от Uном Номинальное: +100% от Uном Максимальное: +120% от Uном |
|
Для классов тока по таблице В.6 | ||
|
Длительность сигнала |
Минимальная: 10 мс (3 мс – для специального применения) | |
|
Время восстановления |
Минимальное: 10 мс (3 мс – для специального применения) | |
|
Время
перехода ( |
Минимальное: 8 мс (1 мс – для специального применения) | |
К активным относятся сигналы, источник питания которых находится вне УТМ. Характеристики активных входных и выходных сигналов представлены в таблице В.7.
К пассивным относятся сигналы, источник питания которых находится внутри УТМ. Эти сигналы подаются в аппаратуру в виде контактов, размыкающих или замыкающих цепи определенного сопротивления. При этом для надежной работы нормируется значение тока, протекающего через контакты и нагрузку. Характеристики пассивных входных и выходных сигналов представлены в таблице В.8
Таблица В.8 – Пассивные двоичные входные и выходные сигналы
|
Характеристика |
Значение | |
|
Входной сигнал |
Выходной сигнал | |
|
Разомкнутая цепь |
Минимальное: 50 кОм при Uном Номинальное:
|
Минимальное: 50 кОм при Uном Номинальное:
|
|
Ток максимальный: 0,2 мА при 125% от Uном | ||
|
Замкнутая цепь |
Минимальное: 0 Ом Номинальное: 150 Ом |
Минимальное: 0 Ом Номинальное: 0,05 Uном/Iмакс
|
|
Для классов тока по таблице В.6 | ||
|
Длительность сигнала |
Минимальная: 10 мс (3 мс – для специального применения) | |
|
Время восстановления |
Минимальное: 10 мс (3 мс – для специального применения) | |
|
Время
перехода ( |
Минимальное: 8 мс (1 мс – для специального применения) | |
Объектом стандартизации [8] являются показатели, определяющие технические требования к УТМ и СТМ и предназначены для использования при сравнительном выборе УТМ и оценке их конкурентной способности.
В таблице В.9 в соответствии с [8] приведены показатели безотказности, готовности, ремонтопригодности.
Безотказность нормируется средним временем между отказами в часах (To), которое должно рассчитываться изготовителем по данным о надежности отдельных компонентов и подтверждаться в реальной эксплуатации за заданный период испытаний с исключением периода ранних отказов.
Готовность нормируется коэффициентом готовности (Kr), который должен определяться отношением общего времени работы и простоя. Kr характеризует способность СТМ выполнять требуемые функции в данный момент времени в отличие от безотказности, характеризующей работу за заданный период времени.
Таблица В.9 – Показатели безотказности, готовности, ремонтопригодности
|
Класс безотказности |
To,ч |
Класс готовности |
Kr,% |
Класс ремонтоспособности |
Тв, ч |
Класс времени ремонта |
Тр, ч
|
|
R1 |
|
A1 |
|
M1 |
|
RT1 |
|
|
R2 |
|
A2 |
|
M2 |
|
RT2 |
|
|
R3 |
|
A3 |
|
M3 |
|
RT3 |
|
|
|
|
|
|
M4 |
|
RT4 |
|
Ремонтопригодность нормируется средним временем восстановления в часах (Тв), вычисляемым как сумма организационного времени (промежуток от обнаружения отказа до уведомления службы ремонта), транспортного времени (от момента уведомления о повреждении до прибытия на объект с необходимым оборудованием), среднего времени ремонта Тр (обнаружения и устранения отказа, а также проверки работоспособности). Это суммарное время нормируется 1, 6, 12 или 24 часами, начиная от момента обнаружения отказа УТМ, и характеризует возможность восстановления полной работоспособности УТМ при заданных условиях эксплуатации.
Показатель «достоверность передаваемых данных» характеризуется вероятностью появления необнаруженных ошибок при вероятности искажения бита 10-4 и нормируется в соответствии с таблицей В.10 [8]. Меры для улучшения достоверности передачи данных описаны в пункте А5 Приложения А к стандарту [8].
При этом используются следующие термины и определения понятий, используемых для пояснения содержания показателя «достоверность»: Трансформация телемеханического сообщения – необнаруженное изменение телемеханического сообщения, возникшее в процессе передачи под воздействием помех и приводящее к приему ложного сигнала. Потеря телемеханического сообщения – необнаруженное телемеханической системой подавление переданного сообщения. Частотные потери телемеханических сообщений – отношение числа потерянных телемеханических сообщений к общему числу переданных телемеханических сообщений.
Таблица В.10 – Классы достоверности передачи данных
|
Класс достоверности данных |
Вероятность появления необнаруженных ошибок |
|
I1 |
|
|
I2 |
|
|
I3 |
|
Классификационный признак «общая погрешность результатов обработки информации» определяется как разность между значениями величин в местах передачи и приема, выраженная в процентах от номинального диапазона.
В [8] они определяются из ряда (класс точности – общая погрешность): А1 – 5,0%; А2 – 2,0%; А3 – 1,0%; А4 – 0,5%; Ах – специальные классы.
Полное время передачи команд должно быть возможно более коротким для обеспечения передачи и обработки команд с высоким приоритетом.
Временной параметр, связанный с обработкой измеряемых величин и команд установок, - это полное время передачи.
Для установления полного времени передачи можно использовать таблица В.11 и В.12 [8].
Таблица В.11 – Требования временного класса SP1 – SP4
|
Временной параметр |
SP1 |
SP2 |
SP3 |
SP4 |
|
Разрешающая способность, мс |
|
|
|
|
Таблица В.12 – Требования временного класса TR1 – TR4
|
Временной параметр |
TR1 |
TR2 |
TR3 |
TR4 |
|
Разрешающая способность, мс |
|
|
|
|
В.5 Некоторые области применения систем телемеханики
Атомная промышленность
Нефтяная и газовая промышленность
Транспортный мониторинг
Электронные системы безопасности
Мониторинг окружающей среды
Спутниковые и охранные комплексы
Телемедицина
Телеобразование
Телесуды
Контроль грузоперевозок
Навигация транспортных средств
Энергетика и коммунальное хозяйство
Международные космические проекты
Бортовые информационно-телеметрические системы (БИТС) для искусственных спутников земли
БИТС для сложных высокодинамичных объектов
БИТС для ракет-носителей (РН)
БИТС для космических аппаратов
БИТС для разгонных блоков РН
Телеметрические системы для летательных аппаратов: самолетов, вертолетов, ракет
Комплексы для управления пусковыми установками ракет
Крупные животноводческие комплексы
Инкубаторы различного назначения
Измерение метеопараметров
Телемониторинг и управление тепловыми пунктами
IP-телефония
Автоматическое управление беспилотными летательными объектами
Автоматический контроль массы различных продуктов
Управление рассредоточенными объектами подвижными и неподвижными объектами
Управление движения поездов
Беспроводное управление автотракторной техникой
Телеметрия реакторной установки
Радиационная идентификация грузов
Автоматическое поддержание дистанции в транспортном потоке
Интеллектуальные транспортные системы
Системы управления железнодорожными объектами
Охранно-поисковые системы
Радиолокация
Радиотелеуправление ракетами
Передача факсимильных изображений
Системы жизнеобеспечения объектов коммерческой недвижимости
Системы АСКУЭ
Системы автоматизированного управления телескопами
Системы дистанционного контроля, диагностики и управления инженерными объектами
Системы управления технологическим оборудованием промышленных предприятий
Телематика
Трубопроводный транспорт
Георазведка
Биотелеметрия
Управление транспортными роботами
В.6.Общие обозначения устройств телемеханики приведены в табл. 1.
При построении условных графических обозначений устройств телемеханик стандартами установления обозначений, которые приведены в таблицах В.13-В.16
Таблица В.13
|
Наименование |
Обозначение |
|
1. Устройство телемеханики.
Примечание. Поворачивать условное графическое обозначение не допускается |
|
|
2 Аппарат (прибор) телемеханики |
|

 или
или
3. Для указания направления передачи (приема) сигнала устройствам телемеханики на линии связи помещают квалифицирующие символы передачи (приема) сигнала, приведенные в табл. 2.
Таблица В.14
|
Наименование |
Обозначение |
|
1. Работа устройства телемеханики: |
|
|
а) на передачу |
|
|
б) на прием |
|
|
в) на прием и передачу одновременно |
|
|
|
Продолжение таблицы В.14 |
|
г) на прием и передачу попеременно |
|
|
2. Работа устройства телемеханики по «n» каналам |
|
|
3. Работа устройства телемеханики на ретрансляцию
Примечание. Квалифицирующий символ ретрансляции ◊ присваивают устройствам телемеханики, с которых осуществляется ретрансляция, и помещают его рядом с УГО на линии связи |
|
 или
или

 или
или

 или
или

 или
или

При построении УГО устройств телемеханики внутри общих обозначений в нижнем поле помещают квалифицирующие символы функций, выполняемых данным устройством, приведенные в табл. 3.
Таблица В.15
|
Наименование |
Обозначение | |
|
1. Телеуправление: |
| |
|
а) передающая сторона |
| |
|
б) приемная сторона |
| |
|
2. Телерегулирование: |
| |
|
а) передающая сторона |
| |
|
|
Продолжение таблицы В.15 | |
|
б) приемная сторона |
| |
|
3. Телесигнализация: |
| |
|
а) передающая сторона |
| |
|
б) приемная сторона
Примечание к пп. 1-3. В случаях, когда в устройствах телемеханики не указывается передающая (приемная) сторона, допускается функции «телеуправление», «телерегулирование» и «телесигнализация» обозначать по пп. 1а, 2а и 3б соответственно |
| |
|
4. Телеизмерение: |
| |
|
а) текущих значений параметров |
| |
|
с индикацией |
| |
|
с записью |
| |
|
б) тока |
| |
|
с индикацией |
| |
|
с записью |
| |
|
в) напряжения |
| |
|
с индикацией |
| |
|
|
Продолжение таблицы В.15 | |
|
с записью |
| |
|
г) мощности |
| |
|
с индикацией |
| |
|
с записью |
| |
|
д) интегральных значений параметров
Примечание. При телеизмерении для указания приемной стороны допускается проставлять квалифицирующий символ «». |
| |
|
5. Телекомандование |
| |
|
6. Телеавтоматика |
| |
|
7. Передача производственно-статистической информации |
| |
|
Примечание к пп. 1-7. Для указания используемой емкости (количество управляемых объектов) устройства телемеханики у квалифицирующего символа функции, выполняемой конкретным устройством, допускается помещать сверху цифровые обозначения. |
| |
|
8. Вызов объекта |
| |
|
9. (Исключен, Изм. № 3). |
| |
|
10. Выбор масштаба
|
| |
|
Продолжение таблицы В.15 | ||
|
Примечания: 1. Для указания функций телеизмерения тока, напряжения, мощности и других электрических параметров в устройствах телемеханики допускается применять квалифицирующие символы с буквенным обозначением измеряемой величины, например: | ||
|
а) измерение тока |
| |
|
с индикацией |
| |
|
с записью |
| |
|
б) измерение напряжения |
| |
|
с индикацией |
| |
|
с записью |
| |
|
в) измерение мощности с индикацией |
| |
|
|
| |
|
с записью |
| |
|
2. Для указания функции конкретного устройства телемеханики допускается применять буквенные обозначения с необходимым пояснением, например,
| ||

 или
или

 или
или











 Устройство
телеизмерения текущих значений
параметров с ВТИ индикацией по вызову.
Устройство
телеизмерения текущих значений
параметров с ВТИ индикацией по вызову.
Для указания вида сигнала передачи (приема) внутри общих обозначений устройств телемеханики в верхнем поле помещают квалифицирующие символы рода тока и напряжения или формы импульсов по ГОСТ 2.737 и ГОСТ 2.721.
Для
указания вида передаваемой информации
используют квалифицирующие символы:
![]() (цифровая) и
(цифровая) и![]() (аналоговая), помещаемые соответственно
со стороны ввода или вывода, рядом с
условным графическим обозначением.
(аналоговая), помещаемые соответственно
со стороны ввода или вывода, рядом с
условным графическим обозначением.
Примеры построения условных графических обозначений устройств телемеханики приведены в табл. 4.
Таблица В.16
|
Наименование |
Обозначение |
|
1. Устройство телеуправления передающее переменным током 10 исполнительным объектам |
|
|
2. Устройство телерегулирования приемное от 2 объектов |
|
|
3. Устройство телесигнализации передающее на 15 объектов |
|
|
4. Устройство телесигнализации от 20 объектов |
|
|
5. Устройство телесигнализации по вызову от 15 объектов |
|
|
6. Устройство телеизмерения текущих значений параметров с индикацией, осуществляющее передачу двоичным пятиразрядным кодово-импульсным методом 10 объектам |
|
|
7. Устройство телеизмерения напряжения с индикацией передающее с выводом цифровой информации |
|
|
8. Устройство телеизмерения интегральных значений параметров 5 объектов |
|
|
|
Продолжение таблицы В.16 |
|
9. Устройство телеизмерения текущих значений параметров с индикацией по вызову 2 объектов |
|
|
10. Устройство телеизмерения активной мощности передающее
Примечание к пп. 6-10. В обозначениях телеизмерения допускается указывать единицу измеряемой величины, характеристики измеряемой величины (например, род тока), тип устройства и т. п. В этом случае обозначение единицы помещают слева от нижнего поля, или внутри нижнего поля слева от квалифицирующего символа функции измерения, а характеристики, тип устройства и т. п. соответственно справа, например, телеметрический передатчик измерения мощности с индикацией трехфазного тока 2 объектам |
|
|
11. Устройство телекомандования 10 объектов |
|
|
12. Устройство телеавтоматики 5 объектов |
|
|
13. Устройство передачи производственно-статистической информации 3 объектам |
|
|
13а. Устройство телеуправления и телеизмерения с индикацией и записью передающее, изменяющейся звуковой частотой модулирования и принимающее по n каналам связи |
|
|
|
Продолжение таблицы В.15 |
|
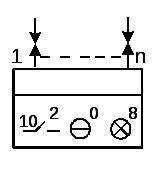
13б. Устройство телеуправления передающее на 10 объектов, телеизмерения тока с индикацией приемное от 2 объектов, телесигнализации приемное от 8 объектов по n каналам связи |
|
|
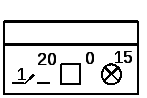
13в. Устройство телеуправления передающее на 7 объектов, телеизмерения с записью приемное от 20 объектов, телесигнализации приемное от 15 объектов |
|
|
14. Сумматор |
|
|
15. Аппарат масштабирующий |
|
|
16. Усилитель суммирующий |
|
|
17. Преобразователь первичный
Примечание. Буквы Х и У обозначают соответственно входной и выходной параметры |
|











В.7 Краткое описание базовых стандартов семейства ГОСТ Р МЭК 870 (60870)
Перечень действующих стандартов в области телемеханики с кратким описанием стандарта приведен в таблице В.17
Таблица В.17 - Перечень базовых стандартов семейства ГОСТ Р МЭК 870 (60870)
|
Часть |
Раздел. Содержание стандарта |
|
1 Основные положения |
1 Общие принципы [2] Дан обзор функциональных элементов, которые образуют структуру СТМ. Приведено описание типовых конфигураций, а также основные функции телемеханики. |
|
2 Руководство по разработке технических требований [3] Приведены руководящие указания по проектированию, установлены спецификации для УТМ и СТМ, согласовывающие индивидуальные требования пользователя. | |
|
3 Основные аспекты передачи телемеханических данных и руководство по использованию стандартов МЭК 870-5 и МЭК 870-6 [4] Описана семиуровневая модель взаимодействия открытых систем ИСО и трёхуровневая модель повышенной производительности (ЕРА). | |
|
2 Условия эксплуатации |
Установлены требования к источникам питания и электромагнитной совместимости |
|
2 Условия окружающей среды [6] Определены условия окружающей среды, которым должны соответствовать УТМ. Установлены классы для различных условий эксплуатации.
| |
|
3 Интерфейсы |
Установлены требования к электрическим характеристикам интерфейсов, связывающих различные устройства, необходимые для создания СТМ [7].
|
|
4 Технические требования |
Установлены характеристики, которыми должны обладать УТМ и СТМ, чтобы они могли непрерывно, точно и надёжно выполнять возложенные на них функции, обладать гибкостью и способностью адаптации к будущим запросам пользователей [8]. |
|
5 Протоколы передачи |
Разделы 1-5 [9.10,11,12,13] Описываются функциональные характеристики передачи данных, обеспечивающие работу СТМ по линиям или сетям связи, требования к достоверности передачи информации, а также методы передачи информации и используемые при этом форматы данных и процедуры обмена, удовлетворяющие этим требованиям.
|
|
| |
В.8 Эквиваленты стандартизированных терминов на английском языке
Для смыслового понимания терминов в области телемеханики при чтении технической литературы на английском языке в таблице В.18 приведено их соответствие русскоязычному толкованию.
Таблица В.18 - Стандартизированные термины на английском языке
|
Термин на русском языке |
Термин на английском языке |
|
1 |
2 |
|
1.Телемеханика |
Telecontrol |
|
2.Телесигнализация |
Teleindication |
|
3.Телеизмерение |
Telemetering |
|
4.Телеуправление |
Telecommand |
|
5.Двухпозиционное телеуправление |
Teleswitching |
|
6.Многопозиционное управление |
Teleadjusting |
|
7.Телерегулирование |
Teleregulation |
|
8.Телемеханическая сеть |
Telecontrol network |
|
9.Телемеханическая система |
Telecontrol system |
|
10.Команда телеуправления |
Command |
|
11.Групповая команда телеуправления |
Group command |
|
|
Продолжение таблицы Таблица В.18 |
|
12.Циркулярная команда управления |
Broadcost command |
|
13.Команда-инструкция |
Instruction command (standart command) |
|
14.Оперативная телеинформация |
Operational information |
|
15.Служебная телеинформация |
Auxiliary information |
|
16.Контролируемый телемеханический пункт |
Outstation; Controlled station; Remote station |
|
17.Телемеханический пункт управления |
Master station
|
|
18.Центральный телемеханический пункт управления |
Control centre
|
|
19.Радиальная структура телемеханической сети |
Multipoint-star configuration |
|
20.Цепочечная структура телемеханической сети |
Multipoint-partyline configuration |
|
21.Кольцевая структура телемеханической сети |
Multipoint-ring configuration |
|
22.Частота потери телемеханических сообщений |
Rate of residual information loss |
|
23.Вероятность потери телемеханического сообщения |
Probability of residual information loss
|
|
|
Продолжение таблицы В.18 |
|
24.Быстродействие телемеханической системы |
Overall response time |
|
25.Время телепередачи |
Telecontrol transfer time |
Литература к введению
1. МЭК 60050-371-84. Международный электротехнический словарь. Глава 371: Телемеханика. — IEC, 1984.
ГОСТ Р МЭК 870-1-1-93. Устройства и системы телемеханики. Часть 1. Основные положения. Раздел 1. Общие принципы. - М.: Издательство стандартов, 1994.
ГОСТ Р МЭК 870-1-2-95. Устройства и системы телемеханики. Часть 1. Основные положения. Раздел 2. Руководство по разработке технических требований. — М.: Издательство стандартов, 1995.
ГОСТ Р МЭК 870-1-4-98. Устройства и системы телемеханики. Часть 1. Основные положения. Раздел 4. Основные аспекты передачи телемеханических данных и руководство по использованию стандартов МЭК 870-5 и МЭК 870-6. - М.: Издательство стандартов, 1998.
ГОСТ Р 51179-98 (МЭК 870-2-1-95). Устройства и системы телемеханики. Часть 2.Условия эксплуатации. Раздел 1. Источники питания и электромагнитная совместимость. — М. : Издательство стандартов, 1998.
ГОСТ Р МЭК 60870-2-2-2001. Устройства и системы телемеханики. Часть 2. Условия эксплуатации. Раздел 2. Условия окружающей среды (климатические, механические и другие неэлектрические влияния). — М. : Издательство стандартов, 2001.
ГОСТ Р МЭК 870-3-93. Устройства и системы телемеханики. Часть 3. Интерфейсы (Электрические характеристики). — М.: Издательство стандартов, 1994.
ГОСТ Р МЭК 870-4-93. Устройства и системы телемеханики. Часть 4. Технические требования. — М. : Издательство стандартов, 1994
ГОСТ Р МЭК 870-5-1-95. Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 1. Форматы передаваемых кадров. — М. : Издательство стандартов, 1995.
ГОСТ Р МЭК 870-5-2-95. Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 2. Процедуры в каналах передачи. ~ М. : Издательство стандартов, 1995.
ГОСТ Р МЭК 870-5-3-95. Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 3. Общая структура данных пользователя. — М. : Издательство стандартов, 1995.
ГОСТ Р МЭК 870-5-4-96. Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 4. Определение и кодирование элементов пользовательской информации. — М. : Издательство стандартов, 1996.
ГОСТ Р МЭК 870-5-5-96. Устройства и системы телемеханики. Часть 5. Протоколы передачи. Раздел 5. Основные прикладные функции. — М. : Издательство стандартов, 1996.
ГОСТ 26.205-88. Комплексы и устройства телемеханики. Общие технические условия. — М. : Издательство стандартов,1989.
МИ 2439-97. ГСИ. Метрологические характеристики измерительных систем. Номенклатура. Принципы регламентации, определения и контроля. — М. :ВНИИМС, 1997.