

Стрмех_3_У_2002
.pdfякщо врахувати, що |
Q |
dM |
|
P |
dx |
, |
|
то |
|
|
|
|||||||||||
|
dx |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
dy |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1P |
2 l |
|
|
|
2 |
|
|
|
|
|
||||||||
|
UQ |
|
|
y |
|
|
dx |
|
|
|
|
(2) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
2 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||
Робота зовнішніх сил: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
L |
|
|
|
||
|
|
А Р |
|
y dx , |
|
|
(3) |
|||||||||||||||
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
0 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
1 |
l |
|
|
|
|
|
|
|
|
||
|
|
де |
y 2 dx |
|
|
|
||||||||||||||||
|
|
|
|
|
||||||||||||||||||
з вираження: |
|
|
|
|
|
|
|
|
2 |
0 |
|
|
|
|
|
|
|
|
|
|
||
|
Uм + UQ = A, |
|
|
|
|
|
|
|
|
|||||||||||||
одержимо: |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
2 l |
|
|
l |
|||
|
|
P |
|
|
|
|
|
|
|
|
|
1P |
|
P |
||||||||
|
|
|
y2dx |
|
|
|
y 2 dx |
|
y2dx |
|||||||||||||
|
|
2EJ |
|
2 |
|
2 |
||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
0 |
0 |
|||||||||||
чи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
l |
|
|
|
|
|
|
|
|
|
l |
l |
|
||||||
|
|
y2dx 1P2 |
y 2 dx y 2 dx |
|||||||||||||||||||
|
|
EJ |
||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Приймаємо, що в момент утрати стійкості стрижень викривляється по синусоїді
x
y asin |
|
, |
яка задовольняє граничним умовам задачі: |
|
|||
|
l |
|
|
1)при х = 0; у = 0
2)при x l; у = 0.
Тоді: |
|
|
|
|
|
|
|
|
|
y |
|
a |
cos |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Pa2 l |
x |
|
1 |
Pa2 2 |
|
|
l |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
a2 2 l |
|
x |
|||||||||||||||||||||||
|
|
sin2 |
|
dx |
|
|
|
|
|
|
|
|
|
|
cos2 |
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
cos2 |
|
|
dx |
||||||||||||||||
|
EJ |
|
|
|
|
l |
2 |
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
l |
2 |
|
|||||||||||||||||||||||
|
0 |
l |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
l |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
II l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II |
l |
||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||
у результаті одержуємо: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
P |
|
l |
|
|
|
|
1 |
p 2 |
|
|
|
|
l |
2 |
|
|
l |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
EJ |
2 |
|
|
|
|
|
l2 |
|
|
|
|
2 |
|
l2 |
2 |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
EJ |
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
звідси: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Рк р |
|
|
|
|
|
|
|
|
|
|
|
l 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
помножимо чисельник і знаменник на EJ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
2 EJ |
|
|
|
|
|
|||
|
Рк р |
|
|
|
|
|
l 2 |
|
|
|
|
|
||
|
|
|
|
|
1 |
2 |
EJ |
|
||||||
|
|
|
1 |
|
|
|
|
|
|
|
||||
Позначимо |
|
|
l 2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2 |
|
|
|
1 |
|
|
|
|
|
(4) |
|||
|
|
2 EJ |
|
|
||||||||||
|
|
1 |
1 |
|
|
|
|
|
|
|
||||
|
|
|
l2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р к р |
2 E J |
|
2 E J |
|
(5) |
2 l 2 |
l 2 |
|
|||
|
|
|
|
|
|
Щоб визначити значення коефіцієнта необхідно знати 1, що залежить від типу з'єднання окремих гілок стійки.
Розглянемо стійку з гілками з'єднаними ґратами
|
|
|
|
Q=1 |
|
нехай довжина розкосу d |
|||
|
|
|
|
k |
|
k1 |
|
КК1 |
|
a |
|
|
d |
1 |
|
d |
1 |
||
|
|
|
а |
||||||
|
|
|
|
|
|
n |
|
||
|
|
|
|
|
|
|
|
||
|
|
m |
|
Q=1 |
|
|
поперечну силу сприймає на себе |
||
|
|
|
|
|
|
|
розкіс, подовження якого: |
||
|
|
|
|
b |
|
||||
|
|
|
|
|
|
|
|
||
Npd
d EFp , де Np, Fp - відповідно зусилля і площа перетину розкосу
Np |
Q |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos |
cos |
|
|
|
|
|||
довжина розкосу |
|
a |
||||||
|
|
|
|
|
d |
|||
|
|
|
|
|
|
, |
|
|
тоді |
|
|
|
sin |
||||
|
|
|
|
a |
||||
|
|
|
|
d |
|
|||
|
|
|
|
|
, |
|||
|
|
|
|
EF cos sin |
||||
|
|
|
|
|
p |
|||
крім того |
|
|
d = KK1 · cos |
|||||

чи: |
KK1 |
|
d |
|
|
|
a |
|
|
|
||
cos |
|
EF cos2 |
sin |
|
||||||||
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
(6) |
||
|
1 |
EF cos2 sin |
|
|||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Розглянемо стійку з гілками з'єднаними планками
у точках n і n1 згинальні моменти = 0, діють тільки поперечні сили
b/2
b |
n |
n1 |
b/2
Q=1
½ 1/2
1/2
n n1
n1
 1 b/2
1 b/2
b/2
½  1/2 Q=1
1/2 Q=1

1 |
2nn1 |
|
|
|
|
(7) |
tg 1 |
|
|
|
|
||
|
b |
|
|
|
|
|
|
ymax=nn1 |
|
|
|
|
|
1/2 |
|
|
Mp |
|
M p |
|
|
b/2 |
|
|
|
|
|
|
|
|
b/4 |
|
|
b/2 |
|
ymax nn1 |
1 |
1 в |
в |
2 в |
в3 |
чи |
EJB |
2 2 4 3 2 |
48EJв |
|||
|
|
|
|
|
|
|
|
1 |
2в3 |
|
в2 |
||
|
48 EJ в в |
24 EJ в |
||||
де Jв - момент інерції однієї галузі колони. |
|
|
|
|||
Лекція 10 |
|
|
|
|
|
|
|
Розрахунок на стійкість колони східчастого перетину |
|||||
|
x |
|
|
|
|
|
|
P |
|
P |
|
P |
|
l1 |
I1 |
|
|
|
|
|
|
|
|
|
|
M = -P ( - y) |
|
l |
|
|
|
y |
|
|
|
|
|
|
|
||
l2 |
I2 |
|
|
|
|
x |
|
y |
|
|
|
|
|
Запишемо диференціальне рівняння осі стійки для кожної ділянки |
||||||
d2 y |
|
M |
|
d2 y |
2 |
|
M |
1 |
|
|
|
|
|
|
|
dx2 |
EJ1 |
|
dx2 |
EJ2 |
|||
|
|
|
|||||
тоді
|
|
|
|
|
|
|
|
|
|
|
d2 y |
|
|
|
Р y1 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
чи |
|
|
|
|
|
|
|
|
|
dx2 |
|
|
|
EJ1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
d2 y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Py |
|
|
|
|
P |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
аналогічно |
|
|
|
|
|
|
|
|
|
dx2 |
EJ1 |
|
EJ1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
d2 y |
|
|
|
|
|
Py |
|
|
|
|
P |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|||||||||
позначимо |
|
|
|
|
|
|
|
|
|
dx2 |
|
EJ2 |
|
EJ2 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
||||
|
|
|
|
К2 |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К2 |
|
; |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
1 |
|
EJ1 |
|
|
|
|
|
|
|
|
2 |
|
EJ2 |
|||||||||||||
|
d2 y |
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 |
|
К12 у1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|||||
|
dx |
2 |
EJ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
d2 y |
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
К22 у2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
|||||||
|
dx |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
EJ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Загальне рішення диференціального рівняння (1) |
|
|
|
||||||||||||||||||||||||||
y1 C1 sin K1x C2 cos K1x Ф1 |
|
(3) |
|||||||||||||||||||||||||||
приватне рішення Ф1 = А, підставимо його в диференціальне рівняння (1)
P |
A |
P |
; |
|
А = |
EJ1 |
|
||||
|
EJ1 |
|
|
||
|
y1 C1 sin K1x C2 |
cosK1x |
|
|
|
|
|
(4) |
||||||
аналогічно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1 d1 sin K2x d2 |
cosK2x |
|
|
|
|
|
(5) |
||||||
Визначимо коефіцієнти рівнянь (4) і (5) із граничних умов задачі: |
|
|||||||||||||
1) |
При Х = 0 |
|
|
|
|
|
у2 = 0 |
|
|
|
|
|
|
|
|
0 d2 ; |
|
|
|
|
|
d2 = - |
|
|
|
|
|
|
|
2) |
При Х=l |
|
у1 = 0 |
|
|
|
|
|
|
|
|
|
||
|
C1 sin K1l C2 cosK1l |
|
|
|
|
|
|
|
||||||
|
C2 |
C1 tgK1l |
|
|
|
|
|
|
|
|
||||
3) |
При Х = l2 |
|
|
|
|
у1 = у2 |
d sin K |
l |
|
cosK l |
|
|
||
|
C sin K l |
CtgK lcosK l |
2 |
2 |
|
|||||||||
|
1 |
1 2 |
1 |
|
1 |
1 2 |
1 |
2 |
|
|
|
|||
|
C1 cosK1l2 tgK1l2 |
tgK1l d1 sin K2l2 |
cosK l2 |
|
(6) |
|||||||||
4) |
При Х = l2 |
|
|
dy1 |
|
dy2 |
|
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|||
|
|
|
|
dx |
|
|
|
|
|
|
|
|
||

dy1 C1K1 cos K1x C2 K1 sin K1x dx
dy2 d1K2 cos K2 x d2 K2 sin K2 x dx
C1K1 cos K1l2 K1C1tgK1l sin K1l2 d1K2 cos K2l2 K2 sin K2l2
(7)
C1K1 cos K1l2 1 tgK1ltgK1l2 d1K2 cos K2l2 K2 sin K2l2 ;
Вирішуючи спільно рівняння (8) і (9) одержимо
tgK1l1tgK 2 l2 |
|
K1 |
|
(8) |
|
K 2 |
|||||
|
|
|
|
||
|
|
|
|
|
Лекція 11
Утрата стійкості плоскої ферми вигину тонкої смуги і двотаврової балки
Якщо тонка і висока балка прямокутного перетину згинається в головній площині з найбільшою жорсткістю, то плоска форма вигину за критичними навантаженнями стає хитливої і відбувається витріщення балки.
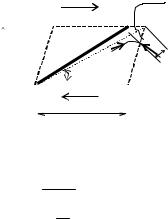
Розглянемо тонку високу балку, завантажену посередині прольоту силою Р
а) |
|
в) |
y |
y1 |
Z |
P |
|
U |
|
|
|
|
|
|
|
Z |
h |
M1(X) |
|
|
|
|
MX |
V |
|
|
|
|
|
l/2 |
l/2 |
|
|
x1 |
|
|
|
|
|
б) |
|
|
|
|
P
У самий початковий момент утрати стійкості деякий переріз на відстані Z від лівої опори повернувся на малий кут , тобто його нова вісь у1 нахилена до вертикалі під цим кутом. Горизонтальний зсув середньої лінії перерізу = u, вертикальний = v.
Тобто у момент утрати стійкості, поряд з вертикальним вигином, з'являється вигин балки в бічному напрямку, а також її крутіння.
Визначимо додаткову потенційну енергію, яка накопичується смугою в момент утрати стійкості, з огляду на бічний вигин і крутіння смуги.
Момент, що згинає смугу в бічному напрямку
My Mx sin ,
з огляду на те, що кут нескінченно малий sin =

P
My 2 Z
Потенційна енергія, що накопичується в результаті бічного вигину
|
|
l |
M y2 dz |
|
P2 |
l |
|
U My |
|
0 |
|
|
|
Z 2 2dz , |
|
2EJ y |
8EJ y |
||||||
|
|
|
0 |
де Jу - момент інерції перетину щодо осі У.
З огляду на, що сила прикладена посередині довжини балки, візьмемо інтеграл на половині її довжини і результат подвоїмо
|
|
|
2 |
|
|
|
|
l |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
U My |
|
P |
|
|
|
Z2 2dz |
|
|
|
|
(1) |
|||||||||||||||||
|
4EJ |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Визначимо потенційну енергію, що накопичується в смузі за рахунок її крутіння |
||||||||||||||||||||||||||||
|
|
|
|
|
|
М |
к рl |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
GJк р |
, |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
чи |
|
|
|
|
|
|
|
|
|
Мкр dz |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
d |
|
, |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
GJк р |
|
|
|
|
|
||||||||||||||||||
звідси |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
||||||
|
|
|
|
Мкр GJкр |
. |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
dz |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Потенційна енергія в елементі нескінченно малої довжини |
|
|||||||||||||||||||||||||||
|
|
|
|
dUкр |
|
|
|
Mкрd |
|
|
, |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
dU к р |
|
GJк р |
d |
|
|
d . |
|
|||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
dz |
|
|
|
|||||||||||||||
Помножимо це вираження і розділимо на dz |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
dU к р |
GJк р |
d |
2 |
dz . |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||||
Потенційна енергія в смузі крутіння |
|
|
|
|
|
|
dz |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U к р dU к р |
|
|
GJк р |
|
|
|
d |
2 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dz |
||||||||||||
|
2 |
|
|
|
|
|
|
|||||||||||||||||||||
чи |
|
l |
|
|
|
|
|
|
l |
|
|
|
|
|
dz |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
l |
|
d |
|
|
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||
|
U |
|
GJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dz |
|
(2) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
к р |
|
|
|
к |
р |
|
|
|
dz |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Повна потенційна енергія внутрішніх сил, що накопичується смугою після втрати стійкості
|
|
|
|
|
P2 |
l |
|
l |
d |
2 |
|
||
|
|
|
|
|
2 |
|
2 |
|
|
||||
U U |
|
U |
|
|
|
0 |
z2 2dz GJ |
кр 0 |
|
|
|
dz |
(3) |
|
|
4EJy |
|
||||||||||
|
Му |
|
кр |
|
|
|
dz |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Визначимо роботу зовнішніх сил у момент утрати стійкості смугою
P |
|
Через малість переміщень, робота зовнішніх |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
сил при повороті перерізу = 0 |
|
|
|
|
|
|
Робота Р на переміщенні дорівнює А = Р ,
без коефіцієнта 1/2 т.к. у момент утрати стійкості сила має свою постійну величину. Переміщення визначимо по інтегралу Мора:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
M M |
y |
dz |
|
|
|
|
||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
y |
|
, |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
EJy |
|
|
P |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
де Му - момент, що викликає бічний вигин силою Р : |
|
My |
|
z ; |
|||||||||||||||||||||
2 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Му - те ж одиничною силою : |
М |
у |
|
z . |
|
|
|
|
|||||||||||||||||
|
2 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Тоді: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
l |
|
Р |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
0 |
|
|
z 2 2 d z |
|
|
|||||||||||||
|
|
|
|
|
|
4 E J y |
|
|
|||||||||||||||||
чи: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Р |
|
|
|
l |
/ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
z 2 2 d z |
|
|
(4) |
|||||||||
|
|
2 E J y |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дорівнюючи потенційну енергію внутрішніх сил роботі зовнішніх сил:
Р 2 |
l / 2 |
l |
|
d |
2 |
Р 2 |
l / 2 |
|
2 |
|
|
||||||
|
z 2 2 d z G J к р |
|
|
|
|
d z |
|
z 2 2 d z |
4 E J y |
|
2 E J y |
||||||
0 |
0 |
|
d z |
|
0 |
|||
|
|
l |
|
|
|
2 |
|
l / 2 |
|
|
2 |
|
d |
|
Р 2 |
||
|
|
|
|
|||||
G J |
|
0 |
|
|
|
d z |
|
z 2 2 d z |
|
|
4 E J y |
||||||
|
к р |
|
d z |
|
0 |
|||
чи

|
|
|
|
|
|
l |
|
d |
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
||||
|
4EJ |
|
GJ |
|
р |
|
|
|
dz |
|
||
|
|
|
||||||||||
|
|
y |
|
|
к |
|
dz |
|
|
|
||
Р 2 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
(5) |
|
|
|
|
2 |
|
|
|
|
|
|
|
||
|
|
|
|
z 2 2 dz |
|
|
|
|||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задаємося вираженням для кутів закручування перерізів, що задовольняють граничним умовам задачі:
Asin |
zz |
|
|
|
|
|
|
|
d |
A |
|
|
|
|
|
|
z |
|
|
|
|
||||||||||||||
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos |
|
|
|
; |
|
|
|
|||||||
l |
|
|
|
|
|
|
|
|
dz |
|
|
l |
|
l |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1) при z = 0 |
|
|
|
|
|
|
|
|
|
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2) при z = l |
|
|
|
|
|
|
|
|
|
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
l |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
z |
|
|
|||||||
|
|
|
|
|
|
|
4 EJ y G Jк р A 2 |
|
|
|
|
|
cos2 |
|
dz |
||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||||||||||||||
|
Р 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
0 |
|
|
|
|
|
l |
||||||||||
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
A 2 |
z2 sin2 |
|
|
dz |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Обчисливши інтеграли: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
17,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Ркр |
|
|
EJy GJкр |
|
|
|
|
|
|
|
|
|
(6) |
|||||||||||||||||||
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Точне рішення |
|
|
|
|
|
|
|
|
|
|
1693, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
EJ |
|
|
|
|
GJ |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
кр |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
кр |
|
|
|
|
||||||
Для двотаврового перерізу: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ркр |
|
|
|
|
EJy EJкр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де - коефіцієнт, обумовлений по таблицях довідників.

Розділ 3. Основи динаміки споруд
Лекція 12
Основи динаміки споруд
Динаміка споруд - це спеціальний розділ будівельної механіки, де розглядаються методи розрахунку споруд на динамічні навантаження.
Динамічними називаються такі навантаження, які під час своєї дії надають масам споруди значні прискорення, викликаючи при цьому появу інерційних сил.
Класифікація динамічних навантажень
1.Нерухоме періодичне навантаження - характеризується тим, що воно багаторазово повторюється через визначені проміжки часу. Періодичне навантаження може бути як беззупинним, так і переривистим.
Якщо беззупинне періодичне навантаження змінюється за законом синуса або косинуса, то таке навантаження називається вібраційним чи гармонічним.
Створюються такі навантаження різними механізмами, що мають неврівноважені маси які обертаються.
2.Короткочасове навантаження - характеризується майже миттєвою дією, тобто швидким розвитком і швидким зникненням (наприклад вибух).
3.Ударне навантаження - характеризується різкою зміною швидкостей тіл які співударяються. Ударні навантаження створюють падаючі тіла, копри, молоти і т.п.
4.Рухоме навантаження постійної або перемінної величини, яке змінює своє положення на споруді (потяги, автомобілі, мостові крани і т.п.).
5.Сейсмічне навантаження - це безладний рух ґрунту, поштовхи, удари і т.п.
Динамічний розрахунок споруд включає в себе визначення внутрішніх зусиль та переміщень від динамічних навантажень, величина і характер дії яких є відомими, а також перевірку системи на резонанс при періодично беззупинному навантаженні відомої частоти.
Ступені свободи систем
В розрахунках на динамічні навантаження розрахункові схеми споруд розрізняють за кількістю ступенів свободи.
Ступенем свободи системи W називається число незалежних геометричних параметрів, що визначають положення всіх мас конструкції в будь-який момент часу на площині або в просторі.
Положення будь-якої маси на площині характеризується трьома геометричними параметрами, тобто ступень свободи такої маси W дорівнює трьом.
У

у
0 х |
Х |