

строймех часть1
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ, МОЛОДЕЖИ И СПОРТА УКРАИНЫ
ДОНБАССКАЯ НАЦИОНАЛЬНАЯ АКАДЕМИЯ СТРОИТЕЛЬСТВА И АРХИТЕКТУРЫ
КАФЕДРА ТЕОРЕТИЧЕСКОЙ И ПРИКЛАДНОЙ МЕХАНИКИ
Мущанов В.Ф., Жук Н.Р., Пчельников С.Б., Денисов Е.В.
СТРОИТЕЛЬНАЯ МЕХАНИКА
КОНСПЕКТ ЛЕКЦИЙ
(для студентов специальности «Промышленное и гражданское строительство»)
Часть 1
Утверждено |
Утверждено |
Проректор по учебной работе |
на заседании кафедры |
Братчун В.И. |
теоретической и прикладной механики |
Утверждено на научно-методическом |
Протокол №4 от 28.04.2011 г. |
Совете |
|
Протокол №29 от 30.05.2011 г. |
|
. |
|
Макеевка – 2011
2
УДК 624.041
Строительная механика: Конспект лекций. Часть 1 / Мущанов В.Ф., Жук Н.Р., Пчельников С.Б., Денисов Е.В. – Макеевка: ДонНАСА, 2011. – 74 с.
Приведены основные теоретические сведения по расчету статически определимых стержневых систем, рассматриваемых в начале изучения курса «Строительная механика».
Для студентов специальности «Промышленное и гражданское строительство» очной и заочной форм обучения.
Составители: |
д.т.н., проф. Мущанов В.Ф. |
|
к.т.н., доц. Жук Н.Р. |
|
к.т.н., доц. Пчельников С.Б. |
|
к.т.н., доц. Денисов Е.В. |
Рецензенты: |
к.т.н., доц. Касимов В.Р. |
|
к.т.н., доц. Сивоконь Ю.В. |
Компьютерный набор |
Пилипчик Л.П. |
Ответственный за выпуск: |
д.т.н., проф. Мущанов В.Ф. |
3
СОДЕРЖАНИЕ
Лекция 1 |
|
Предмет и задачи строительной механики.......................................................................... |
4 |
Лекция 2 |
|
Кинематический анализ сооружения................................................................................... |
7 |
Лекция 3 |
|
Статически определимые многопролетные балки............................................................ |
13 |
Лекция 4 |
|
Общая теория линий влияния и ее применение к расчету статически определимых |
|
балок...................................................................................................................................... |
17 |
Лекция 5 |
|
Построение линий влияния для шарнирно-консольных балок....................................... |
22 |
Лекция 6 |
|
Определение опасного положения системы связанных подвижных грузов на |
|
сооружении по линиям влияния ломаного очертания ..................................................... |
27 |
Лекция 7 |
|
Статически определимые плоские фермы......................................................................... |
30 |
Лекция 8 |
|
Расчет ферм способом рассечения..................................................................................... |
36 |
Лекция 9 |
|
Особенности расчета шпренгельных ферм....................................................................... |
40 |
Лекция 10 |
|
Линии влияния усилий в стержнях ферм.......................................................................... |
42 |
Лекция 11 |
|
Построение линий влияния усилий в стержнях, расположенных на консольных |
|
участках ферм....................................................................................................................... |
46 |
Лекция 12 |
|
Трехшарнирные системы.................................................................................................... |
50 |
Лекция 13 |
|
Определение внутренних усилий в сечениях трехшарнирной арки............................... |
53 |
Лекция 14 |
|
Линии влияния усилий в трехшарнирных арках.............................................................. |
59 |
Лекция 15 |
|
Трехшарнирные арочные фермы........................................................................................ |
61 |
Лекция 16 |
|
Теория перемещений. Основные понятия и теоремы...................................................... |
65 |
Лекция 17 |
|
Интеграл Мора для определения перемещений................................................................ |
70 |
Лекция 18 |
|
Вычисление интеграла Мора путем перемножения эпюр (правило Верещагина, |
|
формула Симпсона) ............................................................................................................. |
72 |
4
Лекция 1 Предмет и задачи строительной механики
Строительная механика в широком смысле - это наука, занимающаяся разработкой принципов и методов расчета сооружений и конструкций на прочность, устойчивость и жесткость.
Расчет на прочность обеспечивает безопасную работу сооружения на воздействие внешних и внутренних усилий. При этом должно обеспечиваться целесообразное сочетание долговечности с экономичностью.
При расчете на устойчивость определяются критические значения внешних воздействий, при которых сооружение сохраняет заданное положение и форму равновесия в деформированном состоянии.
Расчет на жесткость состоит в определении деформаций (прогибов, осадок, вибраций), при которых прочность сооружения или конструкции может быть обеспечена, а нормальная их эксплуатация исключена. Чтобы обеспечить нормальную эксплуатацию конструкции, фактические деформации ее не должны превышать допустимых значений.
Строительная механика в настоящее время располагает большим количеством надежных методов расчета, проверенных опытом и инженерно-строительной практикой. Она непрерывно развивается и совершенствуется в соответствии с запросами быстрорастущей строительной промышленности.
Строительная механика в узком смысле слова, в отличие от сопротивления материалов, занимается преимущественно теорией расчета системы брусьев или стержней, образующих сооружение.
Базой строительной механики является математика, физика, теоретическая механика, экспериментальные исследования.
Сама же строительная механика является основной базой для изучения курсов строительных конструкций: металлических, деревянных, железобетонных и каменных.
Понятие о расчетной схеме сооружения
Расчетная схема заменяет действительное сооружение, представляет сооружение в несколько ином виде и фигурирует вместо него в процессе расчета.
В данном случае используется метод научной абстракции, при котором действительные сооружения заменяются их схемами, поскольку учет всех геометрических факторов элементов и их строгого взаимодействия является практически сложным и недоступным.
Например, узел фермы (металлической или железобетонной) имеет жесткую конструкцию, но при расчете такой узел заменяется идеальным шарниром, чтобы обеспечить простой прием расчета. И, как показывают эксперименты, разница усилий идеализированной и реальной конструкций незначительна.
При выборе расчетных схем принимают следующие допущения.
1) стержневые элементы сооружения на чертеже изображают в одну линию, т.е. элементы заменяют их осями;

5
2) производится идеализация опорных устройств сооружений: а) шарнирно-подвижная опора
б) шарнирно-неподвижная опора
в) защемляющая опора или заделка
г) защемляющая подвижная опора
3)сопряжения элементов сооружения друг с другом также идеализируются, считается, что элементы соединяются между собой либо с помощью идеальных шарниров (например, узлы ферм), либо жестко, где отсутствует взаимный поворот элементов, сходящихся в узле, относительно друг друга (рамные узлы);
4)все действующие на сооружение нагрузки приводятся к стандартным нагрузкам:
а) сосредоточенным силам; б) сосредоточенным моментам; в) распределенным нагрузкам.

6
Классификация расчетных схем
1. С геометрической точки зрения:
а) стержневые системы или конструкции, состоящие из стержней или брусьев, соединяемых друг с другом каким-либо образом;
б) тонкостенные сооружения, состоящие из пластинок, оболочек, плит, соединяемых друг с другом каким-либо способом;
в) массивные сооружения, все три размера которых являются величинами одного порядка (массивный фундамент, плотина и т.п.).
2. По способу соединения элементов между собой:
а) шарнирно-стержневые конструкции - когда стержни или брусья соединяются друг с другом с помощью шарниров (ферма).
б) рамные - это сооружения, имеющие жесткие узлы;
в) комбинированные системы, которые имеют и шарнирные и рамные узлы.
3.С пространственной точки зрения все сооружения делятся на плоские и пространственные. Плоскими называются сооружения, у которых оси всех элементов, а также действующие нагрузки располагаются в одной плоскости. В противном случае - сооружения пространственные.
4.По направлению опорных реакций:
а) безраспорные сооружения - у которых при действии вертикальной нагрузки на опорах возникают только вертикальные опорные реакции;
7
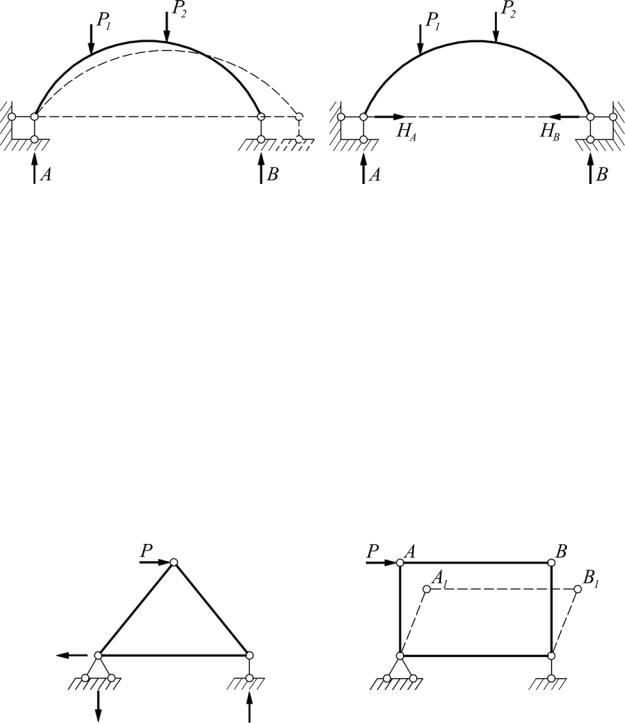
б) распорные сооружения - у которых даже при действии только вертикальных нагрузок возникают как вертикальные, так и горизонтальные составляющие опорных реакций. Последние называются распорами (например, в арках, висячих системах и т.п.).
5. С кинематической точки зрения:
а) геометрически неизменяемые системы, у которых нет лишних связей - статически определимые;
б) геометрически неизменяемые системы с лишними связями - статически неопределимые;
в) геометрически изменяемые системы, кинематические механизмы, - в строительных конструкциях не применяются.
Лекция 2 Кинематический анализ сооружения
Как отмечалось выше, сооружение или система могут быть геометрически неизменяемыми (напр. простая ферма из 3-х стержней) или изменяемыми (ферма, состоящая из 4-х стержней).
Геометрически неизменяемая система |
Геометрически изменяемая система |
(сооружение) |
(механизм) |
При расчете любого сооружения необходимо в первую очередь убедиться в его геометрической неизменяемости.
Изменяемость системы характеризуется ее степенью свободы.
Степенью свободы W называется количество независимых параметров, которые в любой момент времени определяют положение системы на плоскости или в пространстве.

8
Рассмотрим степень свободы стержня. Его положение на плоскости определяется тремя независимыми параметрами X, Y и углом поворота α.
Рассмотрим 2 стержня, соединенных между собой шарниром. Чтобы судить о положении стержней на плоскости, надо использовать 4 параметра, т.е. система имеет 4 степени свободы.
Если бы отсутствовал соединительный шарнир "В", то стержни имели бы 6 степеней свободы, каждый по 3. Таким образом, шарнир, соединяющий два стержня между собой, уменьшает степень свободы системы на 2 и называется простым шарниром.
Рассмотрим теперь 3 стержня, соединенных между собой шарниром "В". Без шарнира система имела бы 9 степеней свободы, а с шарниром - 5. Значит такой шарнир уменьшает степень свободы системы на 4 единицы, т.е. он эквивалентен двум простым шарнирам.
Если рассмотреть систему из 4-х стержней, соединенных одним шарниром, то степень свободы ее будет равна 6. Без шарнира - 12.
Шарниры, соединяющие 3 и более стержней называются сложными или кратными.
Как видно из этих примеров, шарнир, соединяющий n стержней, эквивалентен числу (n-1) простых шарниров.
Можно записать:
W = 3D −2Ш0
здесь: D – число дисков в рассматриваемой системе, Ш0– число простых шарниров
Пример. Д=7; Ш0=9;
Тогда W =3 7−2 9 =3

9
Поскольку все возводимые конструкции должны быть неподвижными, поэтому их необходимо прикрепить к основанию или земле с помощью опорных связей (опорных стержней).
В первом случае диск имеет две степени свободы. При креплении диска двумя опорными связями, возможен только его поворот вокруг точки А. Таким образом, диск имеет одну степень свободы.
Наложим 3 связи - все возможные перемещения диска исключены.
Вывод: каждый опорный стержень уменьшает степень свободы диска или системы дисков на 1 единицу.
Окончательно:
W = 3D −2Ш0 −Соп
где: Д - число дисков (стержней) системы, Ш0 – число простых шарниров, СОП - количество опорных стержней.
Примеры.
1) Д=7; Ш0=9; Соп=3; W=0, т.е. ферма, прикрепленная к земле, геометрически неизменяема.
2) Д=2; Ш0=1; Соп=9; W=5, т.е. рассматриваемая система имеется 5 "лишних" связей.

10
Следует помнить:
1.W>0 - система подвижная, т.е. геометрически изменяемая;
2.W=0 - система геометрически неизменяема и статически определима;
3.W<0 - система геометрически неизменяема и статически неопределима.
Мгновенно изменяемые системы. Анализ геометрической структуры сооружения
Иногда, даже при выполнении условий W=0 или W<0, система может в любой момент, на очень короткое время, становится геометрически изменяемой. Такие системы называются мгновенно изменяемыми.
Рассмотрим первый вид мгновенной изменяемости.
Эта балка геометрически неизменяема, W=0. Найдем реакцию В, которая действует вдоль опорного стержня ВС.
∑М А = 0; Р а - В h = 0 |
h = l sinα |
||
P a - B l sinα = 0 → B = |
P a |
|
|
l sinα |
|||
|
|||
Преобразуем эту балку так, чтобы опорный стержень ВC был на одной линии с балкой АВ. Найдем опорную реакцию В. Ее можно найти по предыдущей формуле, полагая
В = Р0а = ∞
Естественно, эта сила вызовет такие деформации, что балка займет положение, указанное пунктиром, т.е. она будет геометрически изменяемой, причем мгновенно изменяемой.
Итак, если 3 шарнира А, В, и С расположены на одной прямой, без промежуточной опоры, то система будет мгновенно изменяемой.
Или, если направления 3-х опорных стержней пересекаются в одной точке, то система оказывается мгновенно изменяема.