

Стрмех_3_У_2002
.pdf
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
tg |
|
|
; |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
4EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Z=1 |
|
|
|
|
|
2 v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8tg tg |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|||||||||
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
sin |
|
; |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
6EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 sin tg |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
l2 4 v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
2EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
4 |
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
l |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Z=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
P |
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6EI |
|
v |
|
|
4 |
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
4 |
|
|
|
1 |
|
|
|
|
|
|
. |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
12EI |
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
l3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z=1
P 

v2EI l 3
l
5. Будують епюри від одиничних зсувів накладених зв'язків. У межах елементів, що стиснуті зовнішнім навантаженням, епюри криволінійні і будуються відповідно до приведеної вище таблицею. У межах елементів не підданих стиску, епюри прямолінійні і будуються по таблицях звичайного методу переміщень (як при розрахунку на міцність) .

P1 |
|
|
|
P2 |
3 |
P1 |
|
|
|
P2 |
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
4EI |
2EI |
|
|
|
2EI |
|
4EI |
|
3EI |
|
|
|
|
|
l1 |
l1 |
|
|
|
l1 |
|
l1 |
|
l2 |
|
|
|
|
|
4EI 2 v1A |
M1 |
|
|
3EI 1 vB2 |
|
M2 |
|
|
|
|
|||
|
|
h |
|
|
|
|
h |
|
|
|
|
|
|
|
A |
2EI 3 v1A |
B |
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6EJ 4( A1) |
3EJ |
1( B2) |
Z3 = 1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
h |
|
h |
|
|
|
|
|
|
|
|
|
12EJ |
2( A1) |
|
3EJ 1( B2) |
|
|
|
|
3EJ |
|
|
|
|
|
|
h |
|
|
h |
|
|
|
|
|
h |
|
|
|
|
|
|
6EJ |
4( A1) |
|
|
М |
3EJ |
|
|
|
|
|
||
|
|
h |
|
|
|
|
|
h |
|
|
|
|
|
|
6. Коефіцієнти системи канонічних рівнянь визначають як і в звичайному методі переміщень. |
||||||||||||||
|
|
r11 |
|
|
|
|
|
r 4EJ 4EJ |
|
|
|
|
||
|
|
|
|
4EI |
|
М 0 |
|
|
|
A1 |
|
|||
|
|
|
|
l1 |
|
|
|
11 |
l |
h |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
4EI 2 v1A |
|
|
|
|
|
|
|
|
|
|
|
|
|
і т.д. |
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r33 |
|
|
|
|
|
|
|
12EJ |
|
3EJ |
|
3EJ |
|
|
|
|
|
|
|
|
||
h3 |
2 A1 |
|
h 3 1 В 2 |
h3 |
|
|
|
|
|
|
|
|
||

0 |
z4 |
12EJ |
2 A1 |
3EJ |
1 B3 |
3EJ |
h3 |
h3 |
h3 |
7. Для заданої системи рівнянь (без вільних членів), можливі два рішення: перше, коли всі zi = 0, таке рішення нас не влаштовує, т.е не відповідає умовам задачі; і друге рішення, коли детермінант системи, складений з одиничних коефіцієнтів = 0.
r11r12r13
Det r21r22r23 0;
r31r32r33
Розкриваючи цей визначник, одержуємо складне трансцендентне рівняння, для рішення якого необхідно спочатку виразити всі параметри vi через один. Потім рівняння розв’язується:
1)методом підстановки;
2)графічним методом.
Метод підстановки самий примітивний спосіб рішення. Застосовується для найпростіших характеристичних рівнянь.
Сутність графічного способу полягає в наступному:
- вибираємо довільне значення параметра vi і знаходимо det1 = f (v)
v1 |
=> |
det1 |
|
v2 |
=> |
det2 |
|
v3 |
=> |
det3 |
|
і т.д. |
|
|
|
На підставі отриманих значень будуємо графік функції |
det = f (v). |
||
det
det = f (v)
v1 |
v2 |
v3 |
v4 |
v5 |
v |
vкр
Найменше значення параметра v, при якому det = 0 називається vкр.

8. Для стійки, параметри якої ми приймаємо за вихідні визначаємо критичну силу:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к2р EJ |
|
|||||
|
l |
|
P |
|
|
|
Р |
|
|
||||||||||||
|
|
|
|
|
|
|
|
к р |
|
|
|
|
|
|
|||||||
|
|
|
|
l |
2 |
|
|
|
|||||||||||||
|
|
|
|
||||||||||||||||||
|
|
|
|
EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
і розрахункову довжину стержня: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
Рк р |
|
2 EJ |
|
|
|
к2р EJ |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, звідси |
|||||
|
|
|
|
|
|
|
|
|
|
l |
2 |
|
|
l |
2 |
||||||
|
|
|
|
l |
|
|
|
0 |
|
|
|
|
|
|
|
||||||
|
l0 |
|
де: l0 - розрахункова довжина стержня; |
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||
к р
l - геометрична довжина стержня чи коефіцієнт приведення геометричної довжини до розрахункового:
к р
9.Знаючи співвідношення між параметрами інших елементів і вихідним елементом, визначають vкр для всіх інших стиснутих стержнів.
10.Потім для всіх стиснутих стержнів визначають Ркр і l0..
Лекція 8
Поняття про розрахунок на стійкість кругових арок постійного перетину
1. Висновок диференціального рівняння кругового бруса
dS |
|
dS - довжина елемента mn до деформації, |
|
|
n |
|
R - радіус кривизни |
m |
W+dW |
m1n2 положення елемента mn після |
|
W |
|
|
деформації. |
|
|
||
V+dV
V
R  d
d
O
Позначимо проекції переміщення точок m і n через: V - проекцію переміщення на дотичну і W - проекцію переміщення на радіус.
Визначимо відносну деформацію елемента dS. Для цього скористаємося принципом накладення і будемо визначати окремо деформацію елемента від переміщень W і V.

1)W = 0
V+dV V 

m 
 m1 n n1
m1 n n1
d
O 
Абсолютна деформація елемента dS дорівнює dV, а відносна деформація
|
dV |
(1) |
dS |
2) V = 0. Нескінченно малою величиною dW зневажаємо
d |
|
|
|
|
|
|
|
до деформації |
|
|||||||||
|
n |
|
|
|
|
|
|
|
|
dS = Rd |
|
|||||||
m |
|
|
W |
|
|
|
після деформації |
|
||||||||||
|
n1 |
|
|
|
|
|
|
dS mn R W d |
|
|||||||||
m1 |
|
|
|
|
|
1 |
1 |
1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Абсолютна деформація елемента d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
R W d Rd Wd |
|
|
|
|
|
||||||||||||
Відносна деформація: |
Wd |
|
Wd |
|
W |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
(2) |
||||
|
dS |
Rd |
R |
|
||||||||||||||
тому що |
d = Rd . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Повна відносна деформація елемента: |
dV |
|
W |
|
||||||||||||||
|
, |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
(3) |
|||||||
|
|
|
|
|
|
R |
||||||||||||
Кривизна елемента до деформації |
|
|
|
|
|
|
dS |
|
|
|
||||||||
1 |
|
|
d |
|
|
|
|
|
|
|
|
|
||||||
|
dS = Rd |
|
|
|
|
|
|
|
|
|
|
|||||||
|
R |
dS |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Визначимо зміну елемента за рахунок його деформації. Кути повороту дотичних, проведених до точки m:

1) W = 0
|
|
m |
m1 n n1 |
V |
V+dV |
R

O 
2) V = 0
m |
n |
|
|
|
|
W |
|
W+dW |
m1 |
n1 |
|
R |
|
|
||
O |
|
|
||
Сумарний кут повороту дотичної |
|
|
||
V |
|
dW |
||
|
|
|
|
|
R |
dS |
|||
|
|
|||
Зміни кривизни деформованого елемента:
1 d
В dS
Продифференцируем вираження (4):
d |
|
1 |
|
dV |
|
d2W |
|
dS |
R dS |
dS2 |
|||||
|
|
||||||
V
R
у цьому випадку зневажити величиною dV не можна
Заштрихований трикутник через малі величини можна вважати прямолінійним, тоді:
dW
dS
(4)
(5)
Зневажаючи подовженням елемента dS, тобто , з рівняння (3) маємо:
|
|
|
|
dV |
|
|
W |
|
|
|
|||
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
dS |
|
|
|
|
|||||
|
|
|
|
|
|
|
R |
|
|
|
|||
підставляючи це значення в (5) і dS Rd . |
|
|
|
|
|
|
|||||||
|
d |
|
|
W |
|
|
|
d2W |
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
(6) |
|||
|
dS |
R2 |
|
R2d 2 |
r |
||||||||
З опору матеріалів відомо диференціальне рівняння вигнутої осі бруса:
1 |
|
M |
|
|
|
|
|
; |
(7) |
r |
EJ |
|||
підставивши (7) у (6) одержимо диференціальне рівняння кривого бруса:
|
|
|
d2W W |
|
|
M |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2d 2 |
R2 |
EJ |
|
||||||
чи |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
|
|
d2W |
|
MR2 |
|
|
||||||
|
|
|
W |
|
|
|
|
(8) |
||||
|
|
d 2 |
|
EJ |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
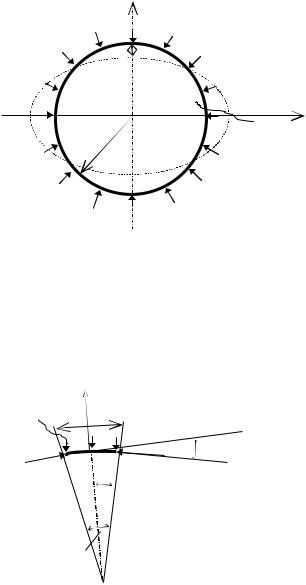
2. Стійкість кругового кільця при радіальному навантаженні
y |
q - інтенсивність рівномірно |
|
K |
розподіленого радіального |
|
W K1 |
навантаження. |
|
q |
||
|
||
R |
x |
|
|
При q < qкр кільце зберігає первісну форму рівноваги й у ньому виникають тільки подовжні зусилля стиску.
При q qкр кільце втрачає стійку форму рівноваги, здобуваючи овальну форму й у ньому, поряд з подовжніми зусиллями з'являються згинальні моменти.
Розглянемо елемент dS до втрати стійкості:
|
y |
|
|
|
|
|
|
|
|
|
|
q |
dS |
|
|
|
У 0 |
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
||
N |
|
|
N |
|
|
|
|
|
d |
||
|
|
|
qdS 2N sin |
||||||||
|
|
2 |
|
0 |
|||||||
|
|
2 |
|||||||||
|
|
d |
через малість кута |
||||||||
|
|
2 |
|
|
|||||||
|
|
|
|
|
d |
|
d |
|
|
||
|
d |
|
|
|
sin |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
2 |
2 |
|
|
|
||
 ПРО
ПРО
тоді
d
qdS 2N sin |
|
0 |
|
2 |
, |
dS = Rd |
qRd Nd 0 ;
N qR |
(а) |
|
|
Після втрати стійкості точка К переміститься в точку К1, прогин стінки кільця складає W. У деформованому стані поздовжня сила викликає в кільці згинальний момент:
M N W qRW
Підставимо це значення моменту в диференціальне рівняння бруса (8):
|
|
|
d2W |
|
|
W |
|
MR2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|||
|
|
|
d 2 |
|
|
|
EJ |
|
|||||||||
|
|
|
d2W |
|
|
W |
|
qR3W |
|
||||||||
|
|
|
d 2 |
|
|
|
|
EJ |
|
|
|||||||
чи |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
d2W |
|
|
|
|
qR3W |
|
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
W 0; |
(б) |
|||||
|
|
d 2 |
EJ |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
Позначимо |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
qR3W |
К2 |
|
|
|
|
|
(с) |
|||||||||
|
EJ |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
d2W |
|
K2W 0 |
|
|
|
|
|
(d) |
|||||||
|
|
d 2 |
|
|
|
|
|
|
|||||||||
Рішення цього однорідного диференціального рівняння запишеться:
|
|
|
|
W C1 sin K C2 |
cosK |
(е) |
||||||
Значення коефіцієнтів С1 |
і С2 знайдемо з граничних умов: |
|
||||||||||
з огляду, що на осях симетрії W’=0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
dW |
|
|
|
1) при = 0 |
|
|
0 |
|
|
|||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
dW |
|
|
|||
|
|
|
|
|
|
|
|
|
C1K cosK C2K sin K |
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
d |
|
|
|||
|
|
0 = С1ДО; |
С1 = 0 |
|
|
|||||||
|
|
|
|
|
dW |
|
|
|||||
2) при |
|
|
|
|
|
|
0 |
|
|
|||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
|
d |
|
|
||||
|
|
0 С2 sin K |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
|
|
2 |
|
|
|
|
|
|
|
|||
|
|
С2 = 0; |
|
|
К = 0 |
|
|
|||||
Отже sin K |
|
0, а це можливо при : |
|
|
||||||||
|
|
|
||||||||||
|
|
|
||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1) К = 0 - суперечить умові задачі |
(див. вище) |
|
||||||||||

2)К=2, sin = 0.
Звираження (с) одержуємо
1 qR3 K2 4,
EJ
звідси |
qкр |
|
3EJ |
|
(f) |
|
R |
3 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Стійкість двошарнірної кругової арки
Розглянемо кругову арку завантажену рівномірно розподіленим радіальним навантаженням q.
q
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Диференціальне рівняння кривого бруса за аналогією з кільцем |
|
|
|
|
||||||||||||||||||||||
|
|
|
d |
2W |
K2W |
, |
|
де K2 1 |
qR3 |
|
|
|
|
|
||||||||||||
|
|
|
|
d 2 |
|
EJ |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рішення його: |
|
W C1 sin K C2 |
cos K , |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
де - кут змінюється від 0 до . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Граничні умови задачі: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1) при = 0 |
W = 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
0 = С2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) при = |
W = 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
0 = C1 sin K ; |
|
C1 |
0 |
|
|
|
|
|
|
|
|
|
|
|||||
Отже |
sin K =0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
К ; |
|
|
|
|
К |
|
|
|
|
|
|
К2 |
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
; |
||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 EJ |
|
|
|
|
|
|
|
||||
|
qR3 |
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
qкр |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
EJ |
|
|
2 |
|
|
|
|
R3 |
|
|
|
|
|
|
|
|
|
|
||||||||

Лекція 9
Стійкість складених стержнів (наскрізних колон)
Складені стержні, що складаються з окремих галузей, зв'язаних чи планками ґратами, мають меншу жорсткість, чим суцільні. Ґрати сприймають дію поперечних сил, вплив яких необхідно враховувати поряд зі згинальними моментами.
x
P P
|
|
|
Q |
dx |
l 1 |
1 |
dx |
dx |
|
|
|
y |
|
|
|
|
|
|
Q |
|
|
|
|
b |
1- 1
М = Ру, потенційна енергія вигину:
l |
M |
2 |
dx |
l |
P |
2 |
y |
2 |
dx |
|
|
P |
2 |
L |
|
|||
UМ |
|
|
|
|
|
|
|
|
Y2dx |
(1) |
||||||||
2EJ |
|
2EJ |
2EJ |
|||||||||||||||
0 |
0 |
|
|
0 |
|
|
||||||||||||
Робота поперечних сил: |
|
|
|
|
|
|
QdS |
|
|
|
Q |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
dUQ |
|
|
|
|
|
|
|
|
dx, |
|
||||
|
|
|
|
|
2 |
|
|
|
2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
де dS = dx
dS
Відносний зсув tg при дії Q=1 позначимо через 1, тоді dX
= Q· 1
Потенційна енергія, рівна роботі поперечних сил:
dUQ |
|
Q2 1dx |
, |
|
|||
|
|
||||||
|
2 |
|
|
|
|
||
|
l |
|
|
1 |
l |
||
UQ dUQ |
|
Q2dx, |
|||||
|
|||||||
|
0 |
|
2 |
0 |
|||