

2.5 Моделювання системи
Моделювання роботи технологічного процесу будемо проводити в середовищі MATLAB Simulink, що володіє широкими можливостями виконання математичного моделювання, створюючи модель з простих блоків. Також в середовищі Simulink міститися блоки, які дозволяють візуалізувати процеси моделювання.
При вирішенні завдань розробки систем управління для АТ необхідно розглядати його імітаційну модель з позицій об'єкта оптимального управління. У теорії систем управління асинхронними електроприводами при моделюванні АД знайшов місце унікальний принцип орієнтації системи координат за вектором потокозчеплення ротора. У даному випадку імітаційна модель АД набуває певну схожість із структурною схемою машини постійного струму, де можливо роздільне управління магнітним станом і моментом на валу двигуна.
Математично умова орієнтації стосовно виражається наступним чином:
![]() ;
; ;
;![]() .
.
Рівняння, що описують АТ в системі координат з примусовою орієнтацією за вектором потокозчеплення ротора.
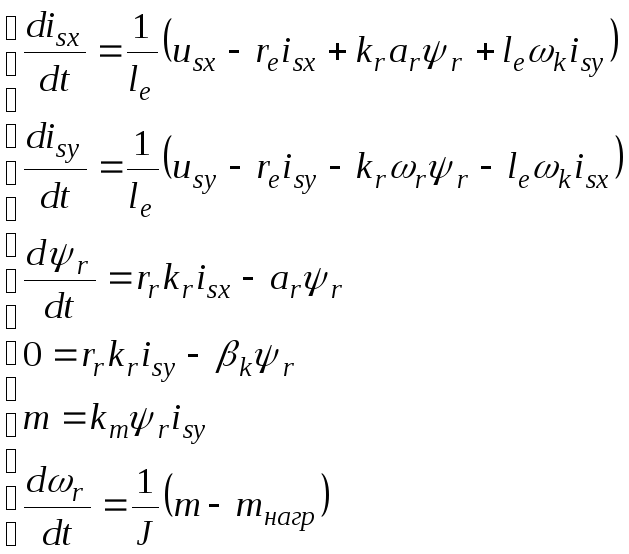
В системі
![]() являє собою ковзання системи координат,
а відповідно швидкість її обертання.
Дані параметри визначаються у відповідності
з наступними виразами:
являє собою ковзання системи координат,
а відповідно швидкість її обертання.
Дані параметри визначаються у відповідності
з наступними виразами:
 ;
;![]() .
.
В системі
рівнянь змінні з індексами «x» і «y»
відповідають компонентам просторового
вектора в координатної системі з
орієнтацією за вектором потокозчеплення
ротора
![]() .
За допомогою правил створення і
перетворення структурних схем, прийнятих
в теорії автоматичного управління,
уявімо систему рівнянь у вигляді
структурної схеми. На рисунку 2.17
представленаструктурна
схема, імітаційної моделі АД у системі
координат з орієнтацією за вектором
потокозчеплення ротора
.
За допомогою правил створення і
перетворення структурних схем, прийнятих
в теорії автоматичного управління,
уявімо систему рівнянь у вигляді
структурної схеми. На рисунку 2.17
представленаструктурна
схема, імітаційної моделі АД у системі
координат з орієнтацією за вектором
потокозчеплення ротора
![]() .
.
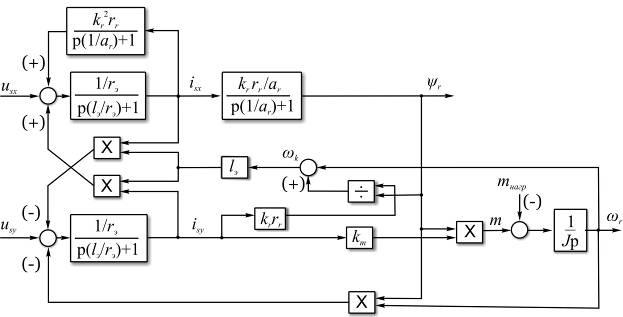
Рисунок 2.17 –
Структурна схема імітаційної моделі
АД у системі координат з орієнтацією
за вектором потокозчеплення ротора
![]()
Модель
АД, представлена на
рис.2.17 зручна для реалізації та розрахунку
в будь-якому з прикладних програмних
продуктів, що підтримують об'єктно-структурне
моделювання систем (Simulink-Matlab, Windora і
т.д.). Для дослідження та перевірки
адекватності створеної моделі АД зручно
виконати її реалізацію в середовищі
Simulink-Matlab. У даній системі симетричні
трифазні напруги, представлені у
відносних одиницях піддаються перетворенню
Кларка і надходять у вигляді компонентів
просторового вектора напруг
![]() і
і![]() на входи координатного перетворювача
Парка-Горєва. Формули для координатного
перетворення Парка-Горєва, що дозволяє
реалізувати перехід від стаціонарної
системи координат до обертової
представлені нижче:
на входи координатного перетворювача
Парка-Горєва. Формули для координатного
перетворення Парка-Горєва, що дозволяє
реалізувати перехід від стаціонарної
системи координат до обертової
представлені нижче:

Тут
![]() ,
,![]() - складові просторового вектора напруги
статора
- складові просторового вектора напруги
статора![]() ,
представлені в стаціонарній системі
координат;
,
представлені в стаціонарній системі
координат;
![]() ,
,
![]() - складові вектора напруги статора
- складові вектора напруги статора![]() ,
представлені під обертається системі
координат;
,
представлені під обертається системі
координат;
![]() - кут повороту
обертової координатної системи (кут
орієнтації). Параметр
- кут повороту
обертової координатної системи (кут
орієнтації). Параметр
![]() пов'язаний з кутовою швидкістю обертання
координатної системи
пов'язаний з кутовою швидкістю обертання
координатної системи![]() завдяки наступного виразу:
завдяки наступного виразу:
![]() .
.
Координатний
перетворювач Парка-Горєва зорієнтований
спільно з системою координат розробленої
імітаційної моделі АД. Завдяки цьому
на входи моделі по напрузі
![]() і
і![]() надходять компоненти просторового
вектора напруги, представленого під
обертається системі координат.
надходять компоненти просторового
вектора напруги, представленого під
обертається системі координат.
Синтез регуляторів проводився із стандартної методики настроювання контурів на модульний або симетричний оптимум. Далі наведемо лише передавальні функції регуляторів і короткий опис контурів.
Контур струму.
Налаштування контура струму проводилася на модульний оптимум за допомогою ПІ-регулятора.
Передавальна функція ПІ-регулятора струму
 .
.
Коефіцієнт підсилення регулятора струму:
 ,
,
де
коефіцієнт ОЗ по струму.
![]() - коефіцієнт
оптимізації.
- коефіцієнт
оптимізації.
Постійна часу регулятора струму:
![]()
Налаштування контура близька до налаштування на модульний оптимум (МО) системи 2-го порядку. Контур є астатичною системою 1-го порядку з управління.
Контур потокозчеплення.
При оптимізації контуру потокозчеплення внутрішній оптимізований замкнутий контур струму представлений усіченої передавальної функцією 1-го порядку.
Передавальна функція ПІ-регулятора потокозчеплення

Коефіцієнт посилення і постійна часу регулятора потокозчеплення визначаються за виразами

де

![]()
![]() - коефіцієнт
оптимізації.
- коефіцієнт
оптимізації.
Налаштування
контура близька до налаштування на
модульний оптимум системи другого
порядку. Контур є астатической системою
регулювання першого порядку з управління
та забезпечує нульову сталу помилку
![]() .
.
Контур швидкості.
При оптимізації контуру швидкості внутрішній оптимізований замкнутий контур струму представлений усіченої передавальної функцією 1-го порядку.
Передавальна функція ПІ-регулятора:

Коефіцієнт посилення і постійна часу регулятора швидкості визначаються за виразами:
Оптимізований контур при відпрацюванні східчастих керуючих впливів забезпечує високу швидкодію при Перерегулювання в загальному випадку більше 43%. Налаштування контура без фільтрів на вході близька до налаштування на СО.
Для обмеження перерегулювання на рівні близько 8,1% на вході контуру швидкості включено два однакових фільтра.
Нелінійна система.
Подальше моделювання проводилося з урахуванням основних нелінійностей - насичення регуляторів, обмежене напруга перетворювача.
До нелінійної системі для регулювання швидкості пред'являються такі вимоги:
Постійна швидкість обертання рівна, що відповідає лінійному руху кабіни зі швидкістю.
Обмеження прискорення. Прискорення повинно бути.
Щоб виконати висунуті вимоги необхідний задатчик інтенсивності, за допомогою якого встановимо час розгону до робочої швидкості.
Імітаційна модель S-образного задатчика інтенсивності в середовищі Simulink представлена на рисунку 2.18. Перехідні характеристики отримані при моделюванні представлені на рисунку 2.19.
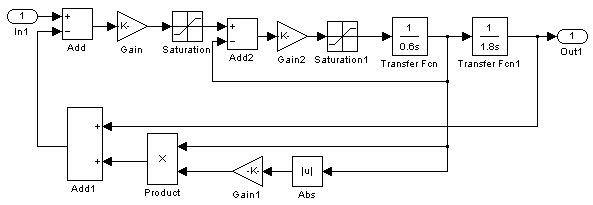
Рисунок 2.18 – Імітаційна модель S-образного задатчика інтенсивності в середовищі Simulink
Нехай час розгону буде 2,4 с.
Перехідні характеристики нелінійної системи отримані при моделюванні представлені на рисунку 2.20.
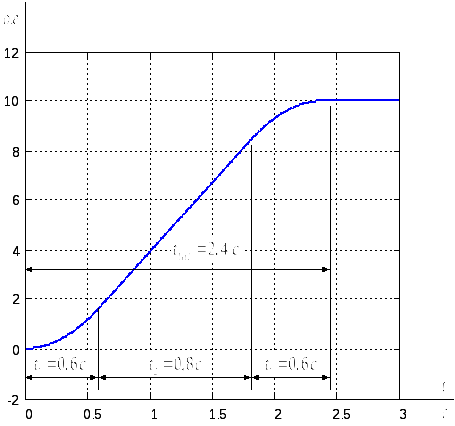
Рисунок 2.19 – Перехідна характеристика S-образного задатчика інтенсивності
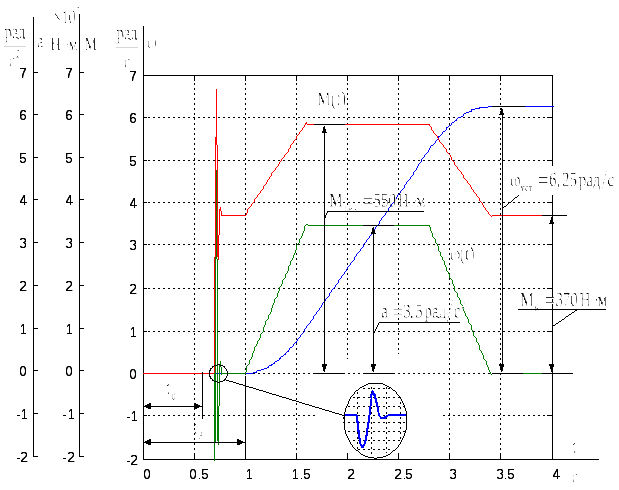
Рисунок 2.20 –
Перехідні характеристики нелінійної
системи![]() ,
,![]() ,
,![]()
Прискорення
обмежено на рівні
![]() ,
що відповідає лінійному прискоренню
,
що відповідає лінійному прискоренню![]() .
.
У САУ при використанні пропорційного регулятора в позиційних режимах спостерігається перерегулювання, що критично для управління позиціонування кабіни ліфта. З метою оптимізації перехідних процесів застосовують регулятор положення з нелінійної характеристикою. У найпростішій схемі другого порядку з обмеженням моменту (струму) двигуна це парабола.
Параболічний регулятор.
Характеристику регулятора положення задаємо у вигляді кусково-лінійної функції має параболічний вигляд:
де
![]()
Визначимо точки
лінійного ділянки характеристики
![]() регулятора положення з виразу:
регулятора положення з виразу:
![]() ,
,
де
![]() - коефіцієнт посилення регулятора
положення.
- коефіцієнт посилення регулятора
положення.
Вирішуючи систему рівнянь
де n = 4, знаходимо точку перетину, де лінійна характеристика регулятора переходить в плавне зростання
Розглянемо відпрацювання завдання на пересування на відстань п'ятого поверху в одномасовій механічній системі. З урахуванням відстані між поверхами рівним 3 метри, завдання складе 15000. Отримані перехідні характеристики представлені на рисунку 2.21.
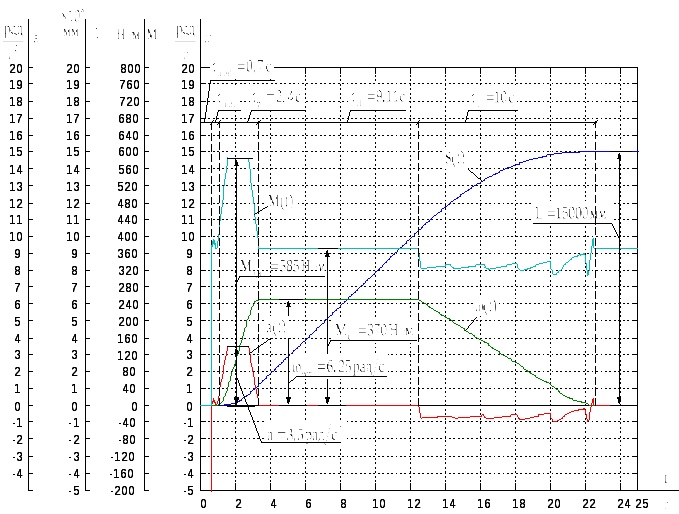
Рисунок 2.21 –
Перехідні характеристики нелінійної
системи СЕП
![]() ,
,![]() ,
,![]() ,
,![]()
Затягування швидкості гальмування викликано роботою параболічного регулятора а також корекцією інтегрального насичення у використовуваних нелінійних регуляторах. Перехідний процес по положенню проходить без перерегулювання і статична помилка дорівнює нулю.