

2.3 Розробка функціональної схеми автоматизації
Перед розробкою функціональної схеми системи, визначимося з місцем встановлення елементів системи.
На рисунку 2.14 представлена схема розміщення обладнання ліфта. Лебідка і шафа управління розташовуються в ліфтовому приміщенні, закритому від проникнення сторонніх осіб.
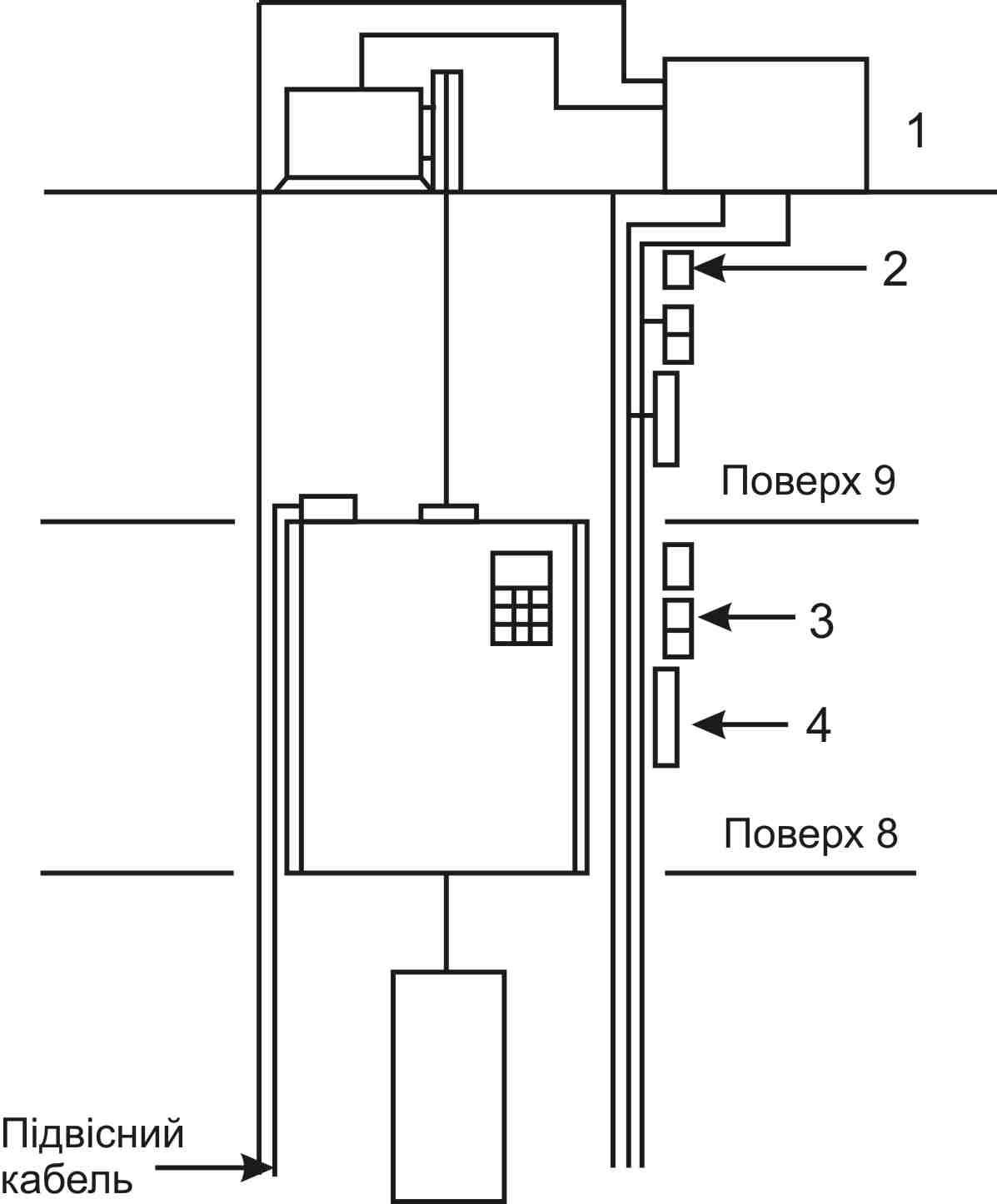
Рисунок 2.14 – Технологічна схема обладнання
де: 1 - шафа контролера, 2 - позиційний індикатор, 3 - поверхові кнопки, 4 - датчик положення кабіни.
Основна плата управління встановлена в шафі контролера. Послідовна лінія передачі даних підрозділяється на канали кабіни і шахти. Канал кабіни, до якого підключена клемна коробка кабіни, являє собою підвісний кабель.
Функціональна схема автоматизації представлена на рисунку 2.15.
Система управління на базі контролера забезпечує виконання різних режимів роботи ліфта.
У режимі навчання система визначає місцеположення кабіни в шахті за допомогою датчиків 6.
У режимі нормальної роботи система здійснює просте змішане управління ліфтом з кабіни і з посадочних майданчиків, з виконанням попутних викликів (збірна система при русі в обох напрямах).
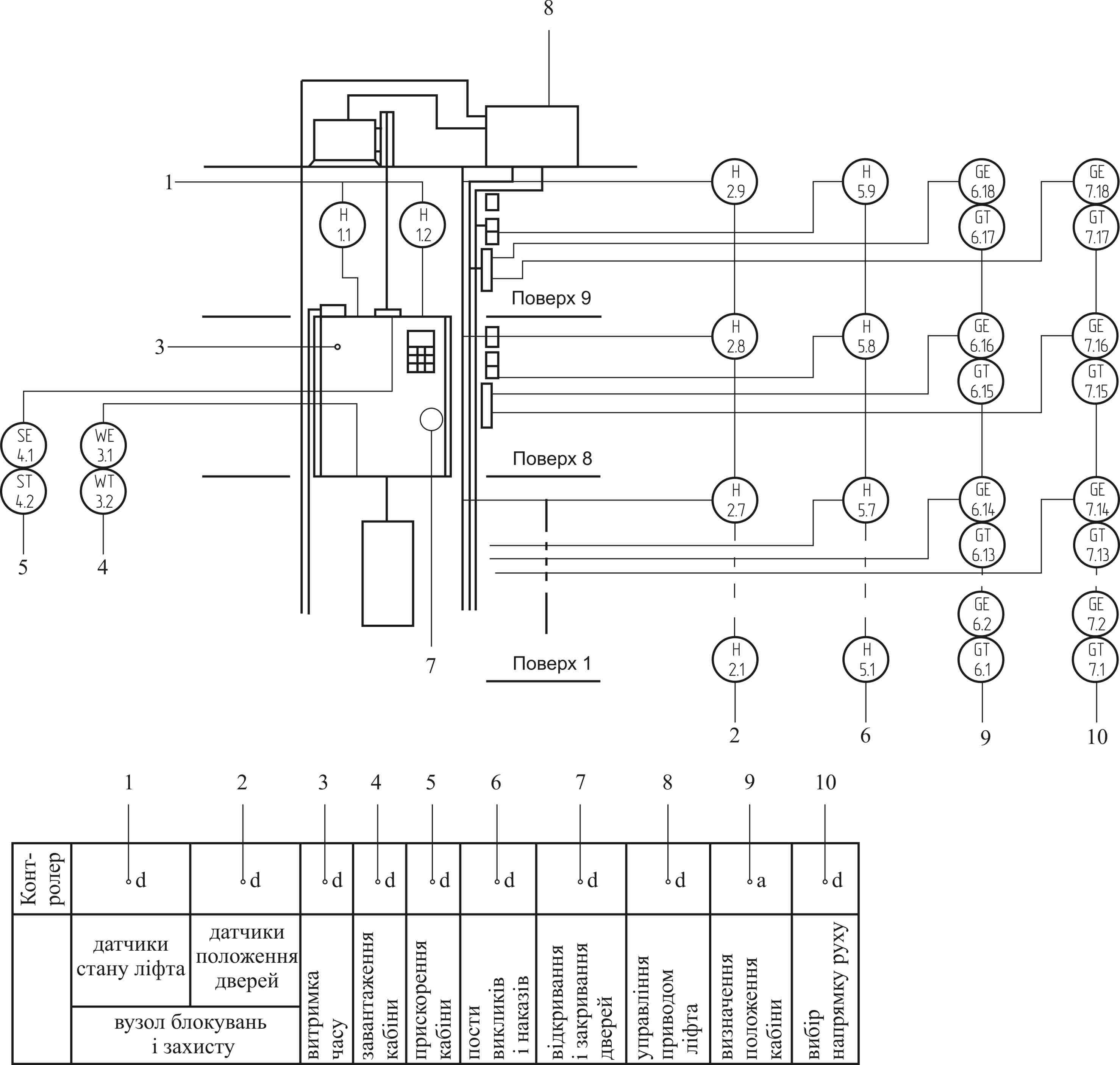
Рисунок 2.15 – Функціональна схема автоматизації системи
У режимі ревізії управління ліфтом проводиться тільки з поста ревізії на даху кабіни від кнопок «Вгору», «Вниз» і «Стоп». При цьому виключена дія: визивних кнопок з поверхів і кнопок наказу з кабіни; ключів перемикачів управління на режими парковки, виклику на спеціальний поверх і незалежного обслуговування; управління з машинного приміщення.
Рух кабіни в режимі ревізії проводиться тільки на малій швидкості, обмежується кінцевими вимикачами і можливий лише при повністю закритих дверях кабіни і шахти.
Режим тестових прогонів використовується для обкатки ліфта, перевірки його роботи (правильного функціонування ліфта, реєстрації відмов і збоїв), локалізації дефектних місць, завдання програми роботи ліфта для контролера або зміни раніше закладеної програми.
У режим пожежної небезпеки ліфт переходить автоматично під час вступу сигналу з системи пожежного захисту будівлі або від спеціального датчика. Перехід в режим здійснюється для всіх режимів роботи ліфта, окрім режимів ревізії і аварійного переміщення кабіни.
Режим землетрусу включається від спеціального ключа на одному з посадочних майданчиків або від сейсмодатчика 4, що має електричний зв'язок з контролером ліфта. При цьому кабіна зупиняється на найближчому посадочному майданчику і стоіть там з відкритими дверима.
Окрім стандартних функцій, система забезпечує точну зупинку з динамічним підстроюванням місцезнаходження в процесі завантаження ліфту.
2.4 Розробка алгоритму функціонування системи
Центральною частиною блоку управління є мікропроцесор LOGO! 230RC фірми SIEMENS. В основу принципу роботи системи покладено метод тактового опитування всіх пристроїв (датчиків), контролюючих положення кабіни ліфта в шахті, а також всіх кнопок викличних і наказових постів. До пристроїв, контролюючим положення кабіни в шахті, відносяться датчики верхнього і нижнього поверхів (ДВП і ДНП) датчик точної зупинки ДТО, датчики уповільнення вгору ДчЗВв і вниз - ДчЗВн. Датчики ДТО, ДчЗВв і ДчЗВн встановлені на кабіні ліфта. Вони взаємодіють з датчиками розташованими в шахті ліфта в зонах уповільнення і точної зупинки у кожного зупинкового майданчика (реалізується рахунковий принцип визначення положення кабіни в шахті).
Мікропроцесор за допомогою програми, записаної в пристрої організовує цикл з певної кількості тактових імпульсів, достатнього для опитування всіх датчиків і кнопок виклику та наказу.
Рахунок поверхів здійснюється мікропроцесором при русі кабіни вниз по сигналах від датчика уповільнення вниз, а при русі кабіни знизу вгору - по сигналах від датчика уповільнення вгору.
Послідовність опитування пристроїв - строго визначена. Мікропроцесор чітко фіксує номер імпульсу, який він посилає. За кожним номером імпульсу закріплено одне певний пристрій, внаслідок чого мікропроцесор «знає, який пристрій в даний момент опитує. Для виділення при дії тактового імпульсу опитування сигналу від відповідного йому опитуваного пристрою використовуються мультиплексори (у блоці управління їх декілька для обслуговування потрібної кількості опитуваних пристроїв). При цьому на інформаційні виходи підключені виходи опитуваних пристроїв, а поява на його виході одного з цих сигналів визначається і подається на адресні входи трирозрядним двійковим кодом.
Двійковий код, керуючий роботою мультиплексора, формується на виходах двійкового лічильника. Тактові імпульси надходять на лічильник з передавального виходу мікропроцесора ТХД, тобто на рахунковий вхід лічильника послідовно подаються опитувальні імпульси. По закінченні циклу опитування лічильник скидається в початковий стан.
Розглянемо послідовність дії блоку в момент включення ліфта. Після включення насамперед у мікропроцесор вводиться число, що визначає поверховість будівлі. Код поверховості набирається на окремому мультиплексорі на виходах якого при установці ліфта набирається потрібний двійковий код. Мікропроцесор по черзі підключає виходи цього мультиплексора до свого входу INTO, який використовується не як вхід зовнішніх переривань, а як вхід, призначений тільки для опитування кількості поверхів у будинку.
Після визначення кількості поверхів ліфт здійснює калібрувальний рейс на перший поверх при першому натисканні на будь-яку кнопку виклику або наказу (якщо ліфт не знаходиться на першому поверсі).
Якщо, наприклад, при стоїть на першому поверсі вільної кабіні надходить виклик з першого поверху, то цей сигнал через мультиплексор надходить на вхід мікропроцесора RXD - стандартний вхід приймача сигналів. Мікропроцесор виконує відповідну дію, а саме, на запит про стан викличний кнопки першого поверху приходить імпульс від цієї кнопки, що свідчить про наявність виклику, і формує на порту адресу, за якою з пристрою, що запам'ятовує надходять команди про подальші дії, виявляється збіг поверху виклику з поверхом положення кабіни, і на виході RD мікропроцесора формується сигнал, який після посилення надходить на вихід « відчинення дверей ».
Припустимо, що пасажир увійшов в кабіну і натиснув кнопку наказу п'ятого поверху. У циклі опитування за кнопки виклику та наказу п'ятого поверху відповідає в даному випадку 13-й імпульс. При появі на виході TXL мікропроцесора 13-го за рахунком імпульсу він потрапляє на рахунковий вхід лічильника, двійковий код на виході якого включає канал мультиплексора, на вході якого підключений сигнал від кнопки наказу п'ятого поверху, і з виходу мультиплексора цей сигнал надходить на вхід RXD приймача сигналів мікропроцесора. Далі, як описано вище, мікропроцесор обробляє цей сигнал і формує сигнал на виході WR, який після посилення надходить на вихід «вгору» і забезпечує включення реле управління вгору в релейного частині схеми. При русі вгору рахунок поверхів здійснюється по датчиках уповільнення вгору. Після прибуття на поверх призначення і виході всіх пасажирів з кабіни в блок електронного селектора подається сигнал "Скидання", за яким знімаються сформовані раніше сигнали управління, і ліфт готовий до руху за викликом або наказу. При русі кабіни ліфта мікропроцесор за допомогою мультиплексорів безперервно опитує датчики уповільнення вгору і вниз, датчик точної зупинки, датчики крайніх поверхів, кнопки викликів і наказів. Інформація, що надходить від цих пристроїв, обробляється мікропроцесором, який відповідно до записаної в пристрої програмою формує необхідні сигнали управління.
На рисунку 2.16 наведена блок-схема програми управління ліфтом в режимі «Нормальна робота». При закритих дверях за допомогою програми, записаної в пристрої пам'яті, здійснюється опитування постів виклику, і при появі виклику, перевіряється умова знаходження кабіни ліфти на тому ж поверсі виклику. Якщо ця умова не виконується, то здійснюється перехід до програмного блоку «Вибір напрямку», а при його виконанні формується сигнал «Відкрити двері».
Після відкривання дверей по завершенні витримки часу або при надходженні сигналу наказу забезпечується закривання дверей, вирішується завдання вибору напрямку руху з урахуванням взаємного положення поверху призначення та поверху вихідного положення кабіни. Відповідно до результатів цього вибору включається привід для руху кабіни в потрібному напрямку. У процесі руху кабіни здійснюється перевірка умови збігу положення кабіни з поверхом призначення.
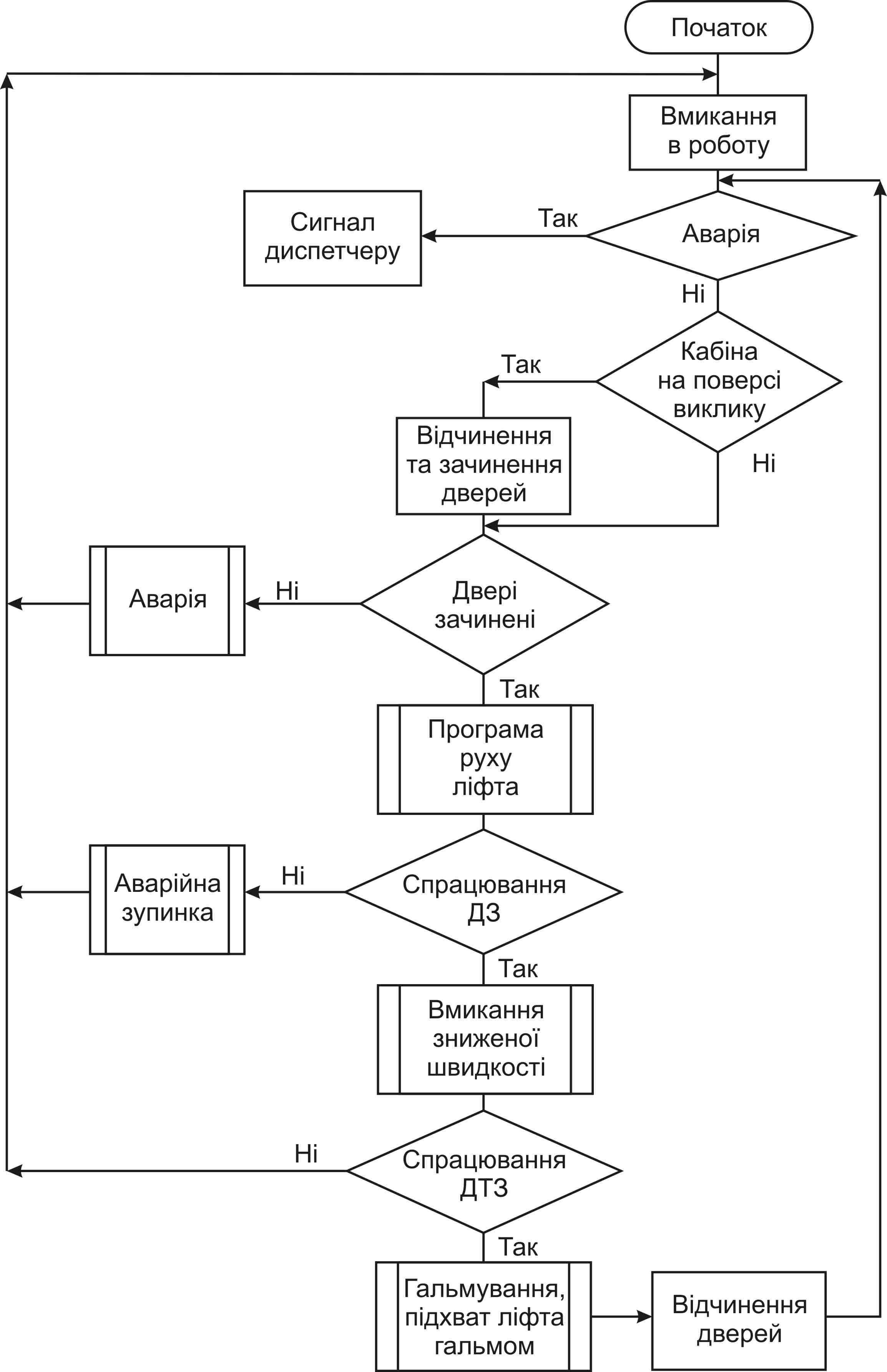
Рисунок 2.16 – Загальний алгоритм функціонування системи управління пасажирським ліфтом в режимі «Нормальна робота»
При виконанні цієї умови формується сигнал уповільнення і зупинки кабіни, відкриваються двері, далі управління здійснюється аналогічно описаному.
Аналогічні програми формуються для забезпечення роботи ліфта в інших режимах (з урахуванням особливостей роботи в цих режимах). Щоправда, управління в «Режимі ревізії» зазвичай виконують без участі мікропроцесорної системи для забезпечення більшої безпеки (алгоритм управління в цьому режимі досить простий а можливість управління в даху кабіни не повинна залежати від працездатності мікропроцесорної системи). При використанні режиму групового управління вводять додаткові програмні блоки, виконання яких залежить від прийнятого при цьому алгоритму управління.