

17. Активное торможение. Основные зависимости.
Активное торможение обеспечивается за счёт реверсирования главного двигателя, после чего создаётся сила упора винта назад. В общем случае процесс активного торможения можно разделить на 3 этапа:
Прохождение команды продолжается от момента подачи команды в МО до момента закрытия топлива на ДВС, пара на ТЗА или выключения питания ГЭД. Первый период длится недолго, примерно 5-10 с.
Пассивное торможение ддлится с момента прекращения подачи топлива (пара) до момента реверса (15 с).
Активное торможение длится с момента реверса до момента полной остановки судна или снижения скорости до какого-то заданного значения.
При активном торможении диф. уравнение принимает вид:
![]()
В процессе активного торможения сила Ре изменяется по закону:
![]() ,
,
где Vo - скорость в момент начала торможения.
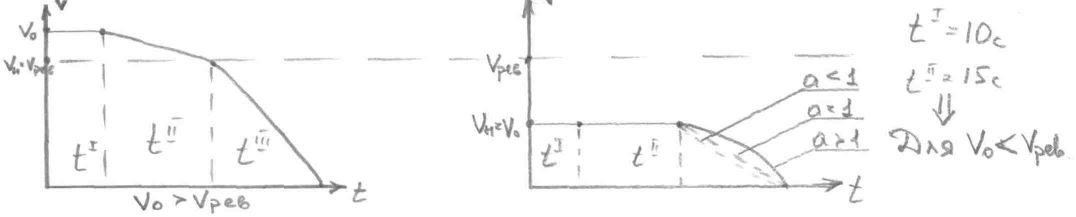
1) Если Vo>Vpeв, то Vн=Vрев. Vрев - это скорость переднего хода при которой двигатель внутреннего сгорания уверенно запускается на задний ход. Поскольку Vо>Vрев процесс торможения состоит из 3-х периодов:
1 Прохождение команды t1; (=10с)
2 Пассивное торможение t2 при котором происходит падение скорости от Vо доVн.
3 Активное торможение, t3 при котором происходит падение скорости за счет упора винта, работающего на задний ход от Vн до 0
2) Если Vo < Vрев, то процесс активного торможения состоит из 3-х периодов:
1 Прохождение команды t1; (=10c)
2 Время запуска главного двигателя на ЗХ, по правилам тех. эксплуатации он составляет 15с.
3 Период активного торможения t3
Введем обозначения:
а - коэффициент активного торможения
![]()
С учетом этого:
![]()
Решение этого диф. уравнения зависят только от величины а.
Активное торможение обеспечивается за счет реверсирования главного двигателя, после чего создается сила упора винта назад.
18. Анализ информации, получаемой от САРП. Истинные и относительные векторы. Имитация манёвра для безопасного расхождения, параметры манёвра, время начала исполнения манёвра, контроль выполнения манёвра.
Выбор режима индикации векторов перемещений судов в истинном или относительном движении определяется условиями плавания. Индикацию векторов истинного перемещения рекомендуется применять при плавании в проливах, фарватерах во входе в порт и выходе из него, когда он позволяет визуально оценить истинные курсы и скорости встречных судов, быстро отличить подвижные объекты от неподвижных и исключает смазывание радиолокационного изображения береговой черты.
Режим относительного движения обычно используется для более точной оценки ситуации сближения и позволяет значительно проще определять степень опасности нескольких судов по расположению ЛОД относительно допустимой зоны кратчайшего сближения. Поэтому его рекомендуется использовать в районах интенсивного судоходства в условиях ограниченной видимости для оценки ситуации и выбора маневра.
Коротко можно сказать так – ИД применяется чаще всего в САРП имитируется строения расхождения, включающий только один маневр : курсом, скоростью, или курсом и скоростью. Некоторые САРП могут имитировать два последовательных маневра. Имитация может производиться в относительном или истинном движении. Она может быть статической или динамической. При статической – на экране прокладчика сразу отображается ситуация соответствующая моменту окончания выбора маневра. При этом учитывается: время задержки маневра, который выбрал судоводитель и метод непосредственного маневрирования. При динамической имитации – процесс маневра отображается в ускоренном масштабе времени ( приблизительно в 30 раз).